You might also like
- 2019 W2 2020120235817 PDFDocument3 pages2019 W2 2020120235817 PDFJamyia Nowlin Kirts100% (3)
- Doosan DNM500Document104 pagesDoosan DNM500tmsxptoNo ratings yet
- Hitachi Seiki Operators ManualDocument3 pagesHitachi Seiki Operators ManualJaime carbajal0% (1)
- TM Inverter Systems and MotorsDocument632 pagesTM Inverter Systems and MotorsEdimilson Rodrigues50% (2)
- Packing and Polybag Requirements and Guidelines 2-19-2019Document5 pagesPacking and Polybag Requirements and Guidelines 2-19-2019DebashishDolonNo ratings yet
- SINAMICS V70 OPI en-US en-USDocument134 pagesSINAMICS V70 OPI en-US en-USRogério PereiraNo ratings yet
- Ac Servo Amplifier Maintenance GFZ 65005e 07 CompressedDocument53 pagesAc Servo Amplifier Maintenance GFZ 65005e 07 CompressedSelmi AchrefNo ratings yet
- SD Series Digital Ac Servo System User Manual: (Third Page)Document39 pagesSD Series Digital Ac Servo System User Manual: (Third Page)marcos antonio santos100% (1)
- MCV 510 - 1250B Operation and Maintenance Manual V2 - 2 PDFDocument346 pagesMCV 510 - 1250B Operation and Maintenance Manual V2 - 2 PDFGuillermo Ramirez100% (4)
- 16.16 Asda-A2 Servo Drive (Ds301) Controlled by Canopen Bus: Control RequirementDocument16 pages16.16 Asda-A2 Servo Drive (Ds301) Controlled by Canopen Bus: Control Requirementleomar_bNo ratings yet
- Shihlin SS SeriesDocument71 pagesShihlin SS Serieswanahi50% (4)
- Safety Circuit Cent 7Document14 pagesSafety Circuit Cent 7Cesar Miguel Meza RicardoNo ratings yet
- Mitsubishi E500 Series Instruction ManualDocument262 pagesMitsubishi E500 Series Instruction ManualMROstop.comNo ratings yet
- Baumuller B Maxx Test Procedure-1 PDFDocument16 pagesBaumuller B Maxx Test Procedure-1 PDFmrtansNo ratings yet
- JASD Series AC Servo Driver User ManualDocument58 pagesJASD Series AC Servo Driver User ManualPuruf PufNo ratings yet
- Fanuc Series 15-Model TA, TTA Operator's Manual Supplement For Trouble Diagnosis Guidance (B-61214E-1 - 01)Document12 pagesFanuc Series 15-Model TA, TTA Operator's Manual Supplement For Trouble Diagnosis Guidance (B-61214E-1 - 01)theguru_99925% (4)
- Amnc F Alarm List E02 200507Document32 pagesAmnc F Alarm List E02 200507sunhuynhNo ratings yet
- Heideinhain MC420Document52 pagesHeideinhain MC420Roger RochaNo ratings yet
- Dong A SedecalDocument51 pagesDong A SedecalEduardo Saul Mendoza100% (4)
- En NB SkillsAssessment-Student Exam (Martin)Document10 pagesEn NB SkillsAssessment-Student Exam (Martin)Marthin Charles Hutagalung50% (4)
- CNCmakers-EP100 B QuickGuide-EN - EP100Document14 pagesCNCmakers-EP100 B QuickGuide-EN - EP100Angelica PeñarandaNo ratings yet
- F1500-G ManualE PDFDocument75 pagesF1500-G ManualE PDFzeljoasNo ratings yet
- Fanuc Spindle Alarm Codes and Fanuc Spindle Drive FaultsDocument6 pagesFanuc Spindle Alarm Codes and Fanuc Spindle Drive FaultsNguyễn Khắc LợiNo ratings yet
- 03 Ladder Diagram Rev.04Document202 pages03 Ladder Diagram Rev.04Lam PhamNo ratings yet
- Maintenance - Manual AC Servo Amplifier & Spindle ControllerDocument227 pagesMaintenance - Manual AC Servo Amplifier & Spindle ControllerBa Duy100% (1)
- Parameter Manual: Fanuc Ac Spindle Motor at Series Fanuc Ac Spindle Motor # Series Fanuc Built-In Spindle Motor B SeriesDocument772 pagesParameter Manual: Fanuc Ac Spindle Motor at Series Fanuc Ac Spindle Motor # Series Fanuc Built-In Spindle Motor B SeriesMarcelooverdadeirohotmail.com 676765No ratings yet
- Mitsubishi MR-J2-D-S24: General-Purpose AC ServoDocument28 pagesMitsubishi MR-J2-D-S24: General-Purpose AC ServoBrendisNo ratings yet
- XCS2009,11 ManualDocument7 pagesXCS2009,11 Manualsamad100% (1)
- Syntec CNC Maintenance Manual: by Syntec Incorporation Ver 1.3 Date 1999/12/01Document26 pagesSyntec CNC Maintenance Manual: by Syntec Incorporation Ver 1.3 Date 1999/12/01Saif Uddin AhmedNo ratings yet
- User Manual: MK Series Spindle Driver 2.2KW /3.7KW /5.5KW/7.5KW/15KWDocument32 pagesUser Manual: MK Series Spindle Driver 2.2KW /3.7KW /5.5KW/7.5KW/15KWMarlon GeronimoNo ratings yet
- Sanyo Denki R SeriesDocument314 pagesSanyo Denki R SeriesRafael Pertile Carneiro100% (1)
- S1100 Series General Purpose Inverter: User ManualDocument65 pagesS1100 Series General Purpose Inverter: User Manualyohannes tsegaye100% (1)
- Maintenance Manual: Fanuc Ac Spinole ServoDocument152 pagesMaintenance Manual: Fanuc Ac Spinole Servovasiliy vasilievichNo ratings yet
- User Manual of Macro V2.0Document31 pagesUser Manual of Macro V2.0Alex MazurNo ratings yet
- PRONET User Manual V1Document88 pagesPRONET User Manual V1Tülay Mutlu100% (1)
- 6fc5247 0aa00 0aa1 Ncu Box Sinumerik 840d Siemens ManualDocument98 pages6fc5247 0aa00 0aa1 Ncu Box Sinumerik 840d Siemens Manualmarcos lemos100% (1)
- Fanuc Oi-M Keep RelaysDocument3 pagesFanuc Oi-M Keep Relayskarthik kNo ratings yet
- Servo Spindel AlarmDocument46 pagesServo Spindel AlarmBaldev SinghNo ratings yet
- Delta ASDA B2 User ManualDocument337 pagesDelta ASDA B2 User ManualSeyhmus YklNo ratings yet
- Panasonic TH l24c20dDocument39 pagesPanasonic TH l24c20dKingsleen33% (3)
- Delta VFD-B ManualDocument239 pagesDelta VFD-B ManualRay Rosales100% (2)
- Samco-M User Manual: Read/DownloadDocument2 pagesSamco-M User Manual: Read/DownloadRiezky Emunc FaizalNo ratings yet
- MELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17Document1 pageMELDAS AC SERVO MDS-B-SVJ2 Series SPECIFICATIONS AND INSTRUCTION MANUAL OSA17jroyal692974No ratings yet
- 02 - Mitsubishi M70 - ManualDocument491 pages02 - Mitsubishi M70 - ManualRicardo CalvoNo ratings yet
- Multi-Axis Servo Operating InstructionsDocument237 pagesMulti-Axis Servo Operating Instructionsng4c4anh4nguy4n-1No ratings yet
- Mitsubishi Maintenance ManualsDocument39 pagesMitsubishi Maintenance ManualsPrabhat BhateraNo ratings yet
- Fanuc AC Spindle Alarm ListDocument3 pagesFanuc AC Spindle Alarm Listtasias100% (1)
- FOR Series 15i: Servo AlarmDocument8 pagesFOR Series 15i: Servo Alarmsanchai2No ratings yet
- Wiring Diagram: Minas A Servo Driver CN Ser Mini DIN 8-Pin, Male PC Sub-D 9-Pin, FemaleDocument1 pageWiring Diagram: Minas A Servo Driver CN Ser Mini DIN 8-Pin, Male PC Sub-D 9-Pin, Femaleserege75% (4)
- Yasnac J300 Connecting Manual (Type B)Document186 pagesYasnac J300 Connecting Manual (Type B)sunhuynh100% (1)
- B-64113en 03 090827 PDFDocument414 pagesB-64113en 03 090827 PDFMatheus ArrudaNo ratings yet
- DG60 LDocument5 pagesDG60 LFernando LastelNo ratings yet
- Cxa8038p EtcDocument2 pagesCxa8038p EtcYAZAN AINIANo ratings yet
- U209B M AtmelDocument19 pagesU209B M Atmelyassine yassineNo ratings yet
- U2044b TFKDocument6 pagesU2044b TFKnanodocl5099No ratings yet
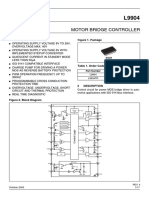
- Motor Bridge Controller: 1 Features Figure 1. PackageDocument17 pagesMotor Bridge Controller: 1 Features Figure 1. PackageNoelNo ratings yet
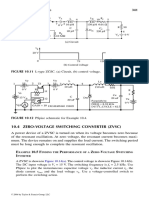
- Resonant-Pulse Inverters: 10.4 Zero-Voltage Switching Converter (ZVSC)Document1 pageResonant-Pulse Inverters: 10.4 Zero-Voltage Switching Converter (ZVSC)Mathurthi BrahmiNo ratings yet
- High Current Helogen Lamp Dimmer 1Document1 pageHigh Current Helogen Lamp Dimmer 1Nguyen Phuoc HoNo ratings yet
- Halogen Dimmer PDFDocument1 pageHalogen Dimmer PDFVictorFaucheretNo ratings yet
- SG3525 Regulated 900W BenchTop Power Supply For Electronic Hobby Projects - ElectroBUFF YouTubeDocument1 pageSG3525 Regulated 900W BenchTop Power Supply For Electronic Hobby Projects - ElectroBUFF YouTubeSirJones Kekapoh100% (1)
- Phase Control Circuit-Load Current Feedback Applications: DescriptionDocument13 pagesPhase Control Circuit-Load Current Feedback Applications: DescriptionjuankiguaNo ratings yet
- IPM Bm64374s-Va-EDocument23 pagesIPM Bm64374s-Va-EMatheus Gonçalves MarquezNo ratings yet
- Design Consideration With AP3041: Application Note 1059Document6 pagesDesign Consideration With AP3041: Application Note 1059subisanNo ratings yet
- Volume I - Final Report - Dry Port PPPDocument36 pagesVolume I - Final Report - Dry Port PPPSajjadul MawlaNo ratings yet
- Info Lec 3Document2 pagesInfo Lec 3mostafa abdoNo ratings yet
- Credit Card Market EntryDocument4 pagesCredit Card Market EntryaqaiserNo ratings yet
- LSGD Categorisation 28.07.2021Document52 pagesLSGD Categorisation 28.07.2021Nayib EMNo ratings yet
- MRIDC - VN - 49 - Asst. Manager, Sr. Exectutive, Executive (Civil)Document3 pagesMRIDC - VN - 49 - Asst. Manager, Sr. Exectutive, Executive (Civil)Payal JainNo ratings yet
- Roble Arrastre Vs VillaflorDocument16 pagesRoble Arrastre Vs VillaflorMyra MyraNo ratings yet
- Assignment 3Document9 pagesAssignment 3Guillermo Rodriguez100% (1)
- Datatool User Guide System3 - UgDocument12 pagesDatatool User Guide System3 - UgSteve RhodesNo ratings yet
- CV-Mabexly Sitohang PDFDocument9 pagesCV-Mabexly Sitohang PDFmpsitohangNo ratings yet
- Algorithms - The University of SydneyDocument6 pagesAlgorithms - The University of SydneySuman.SNo ratings yet
- Biz - Intentionally Rugging Shitcoins To Avoid Tax Liability - Business & Finance - 4chanDocument5 pagesBiz - Intentionally Rugging Shitcoins To Avoid Tax Liability - Business & Finance - 4chanprincesssaphire64No ratings yet
- Reservists Retirees Affairs ProgramDocument35 pagesReservists Retirees Affairs ProgramSweet Holy Jean DamasoleNo ratings yet
- Stem Opt - 2016-04828Document300 pagesStem Opt - 2016-04828satkabeer654No ratings yet
- Acoustic Testing PDFDocument25 pagesAcoustic Testing PDFkenwongwmNo ratings yet
- PDF Induction Machines Handbook Steady State Modeling and Performance 3Rd Edition Ion Boldea Author Ebook Full ChapterDocument53 pagesPDF Induction Machines Handbook Steady State Modeling and Performance 3Rd Edition Ion Boldea Author Ebook Full Chapterjimmie.powers966100% (4)
- CDDocument49 pagesCDAntony SantosNo ratings yet
- BCA 33-SAD-answersDocument25 pagesBCA 33-SAD-answersSakshi PandyaNo ratings yet
- Application LetterDocument5 pagesApplication Lettersdguillermo928No ratings yet
- Monitor AOC 24P3CW EnglishDocument32 pagesMonitor AOC 24P3CW Englishflorinf_uNo ratings yet
- Mirza Kayesh Begg - 250274290 - CompleteReportDocument12 pagesMirza Kayesh Begg - 250274290 - CompleteReportSYEDA MYSHA ALINo ratings yet
- Edwards J. - Piping Workbook. Solving Piping and Header Networks Using Chemcad Version 6.2Document73 pagesEdwards J. - Piping Workbook. Solving Piping and Header Networks Using Chemcad Version 6.2نزار الدهاميNo ratings yet
- HRKL - ISSB EOT RPM Delay Event Analysis R1Document11 pagesHRKL - ISSB EOT RPM Delay Event Analysis R1Loges SinniahNo ratings yet
- ROG Overclocking Guide Core For 5960X, 5930K & 5280KDocument7 pagesROG Overclocking Guide Core For 5960X, 5930K & 5280KEzequiel77xNo ratings yet
- APJARBA 2015 1 001 Customer Satisfaction On The Quality Services of One Department Store in Batangas City PDFDocument10 pagesAPJARBA 2015 1 001 Customer Satisfaction On The Quality Services of One Department Store in Batangas City PDFLuwina jineNo ratings yet
- Conditions Tuition Fees Scholarships PDFDocument2 pagesConditions Tuition Fees Scholarships PDFArjun D KarthaNo ratings yet
- AZ-900 Prepaway Premium Exam 154qDocument96 pagesAZ-900 Prepaway Premium Exam 154qAnshul AakotkarNo ratings yet
- S7 Edge Invoice PDFDocument1 pageS7 Edge Invoice PDFRajesh KumarNo ratings yet