You might also like
- An Introduction Tohf Software Defined RadioDocument77 pagesAn Introduction Tohf Software Defined Radiomario61marioNo ratings yet
- Pulse InductionDocument20 pagesPulse Inductionmarlon_1123762No ratings yet
- Digital IC Projects RayerDocument100 pagesDigital IC Projects RayerBoshra BoshraNo ratings yet
- Analog Modulation TechniquesDocument66 pagesAnalog Modulation Techniquespawan33% (3)
- Kearney and Trecker Installation ManualDocument12 pagesKearney and Trecker Installation Manualaa987100% (1)
- Detect buried metal with a DIY proton magnetometerDocument8 pagesDetect buried metal with a DIY proton magnetometerMario Ariel Vesconi100% (1)
- 1002 - EPE Bounty Treasure HunterDocument7 pages1002 - EPE Bounty Treasure HunterLaurentiu IacobNo ratings yet
- Rockless VFO Low Power TransceiverDocument8 pagesRockless VFO Low Power Transceiverlpardo743267100% (1)
- Search CoilsDocument30 pagesSearch CoilsIgorGishaPopovicNo ratings yet
- Fluxgate Magnetometer CCTDocument9 pagesFluxgate Magnetometer CCTLorenzo D'AmbrosiNo ratings yet
- Electronics Today International April 1990Document68 pagesElectronics Today International April 1990Mitchell CifuentesNo ratings yet
- Fluxgate MagnetometerDocument7 pagesFluxgate Magnetometersmallprice100% (2)
- The TDC Device - Synopsis of Email CorrespondencesDocument7 pagesThe TDC Device - Synopsis of Email Correspondencestriple7incNo ratings yet
- Design and Development of A Fluxgate MagnetometerDocument5 pagesDesign and Development of A Fluxgate Magnetometerdr_oxide2No ratings yet
- Construction of A Proton Magnetometer: Department of Physics, University of Colombo, Colombo 3Document8 pagesConstruction of A Proton Magnetometer: Department of Physics, University of Colombo, Colombo 3Yunus Emre VarlıNo ratings yet
- Eti 1980 01 80Document124 pagesEti 1980 01 80Adiel RicciNo ratings yet
- Wireless World 1995 08 S OCR PDFDocument92 pagesWireless World 1995 08 S OCR PDFMilton Nast0% (1)
- Build A Proton Precession MagnetometerDocument14 pagesBuild A Proton Precession MagnetometerPedro J. Mancilla50% (2)
- Detector de MetalesDocument7 pagesDetector de MetalesPabloandres VasquezNo ratings yet
- 22 Tested Circuits Bernard 181 Clive SinclairDocument34 pages22 Tested Circuits Bernard 181 Clive Sinclairsantiago962100% (2)
- ConcentricDocument16 pagesConcentricsorinn1987100% (1)
- An induction balance metal detector circuitDocument7 pagesAn induction balance metal detector circuitAlessandro GonzálezNo ratings yet
- Clarke1 300Document8 pagesClarke1 300Jo RoNo ratings yet
- Earth Magnetometer ProjectDocument17 pagesEarth Magnetometer ProjectMario Ariel VesconiNo ratings yet
- Horizontal "Flatbed" Router Table: MLCS Manual For #9767Document11 pagesHorizontal "Flatbed" Router Table: MLCS Manual For #9767teromandosNo ratings yet
- Eww 1982 04Document132 pagesEww 1982 04Johnny1qNo ratings yet
- Ee Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark StuartDocument6 pagesEe Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark Stuartercan dizdarNo ratings yet
- Ee Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark StuartDocument6 pagesEe Treasure Hunter Ee Treasure Hunter: Mark Stuart Mark Stuartercan dizdarNo ratings yet
- TwoboxDocument4 pagesTwoboxEdmundo CisnerosNo ratings yet
- Four Facet Drill Grinding JigDocument20 pagesFour Facet Drill Grinding Jigian_newNo ratings yet
- Wireless World 1995 09 S OCR PDFDocument100 pagesWireless World 1995 09 S OCR PDFMilton NastNo ratings yet
- Metal Discrimination Using Phase DetectionDocument8 pagesMetal Discrimination Using Phase DetectionlotarrNo ratings yet
- 5100333-00 - Salwico Cruise - Installation Manual - M - EN - 2015 - MDocument104 pages5100333-00 - Salwico Cruise - Installation Manual - M - EN - 2015 - MMarco Pastori100% (1)
- Control & Instrumentation 2Document0 pagesControl & Instrumentation 2SHIVAJI CHOUDHURY100% (3)
- Wireless World 1995 06 S OCRDocument92 pagesWireless World 1995 06 S OCRMilton Nast100% (2)
- Detector Es de MetalDocument4 pagesDetector Es de Metalfredy8704100% (1)
- AXMI NSTER CMB115 Metal Cutting BandsawDocument24 pagesAXMI NSTER CMB115 Metal Cutting Bandsawmikka26No ratings yet
- Standalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDDocument44 pagesStandalone Motion Controller DDCS V3.1 User's Guide: Shenzhen Digital Dream Numerical Technology Co., LTDFarhan Ashraf AliNo ratings yet
- Axminster Lathe ManualDocument24 pagesAxminster Lathe ManualGary SmithNo ratings yet
- Sams ComputerFacts - Apple IIeDocument73 pagesSams ComputerFacts - Apple IIeOscar Arthur KoepkeNo ratings yet
- Design and Fabrication of Crop ReaperDocument9 pagesDesign and Fabrication of Crop ReaperIJRASETPublicationsNo ratings yet
- STRIKE IT RICH WITH A SCINTILLATION COUNTERDocument11 pagesSTRIKE IT RICH WITH A SCINTILLATION COUNTERAndrew GatesNo ratings yet
- Formant Music Synthesizer by C ChapmanDocument111 pagesFormant Music Synthesizer by C ChapmanOscar RipollNo ratings yet
- 3D Simulation of The Vertical Axis Wind TurbinesDocument4 pages3D Simulation of The Vertical Axis Wind TurbinesMostafa RashedNo ratings yet
- Southbend South Bend Sb1027 Users Manual 447654Document84 pagesSouthbend South Bend Sb1027 Users Manual 447654Maximiliano Alvarez RinconNo ratings yet
- Digital Detection and Feedback Fluxgate MagnetometerDocument7 pagesDigital Detection and Feedback Fluxgate MagnetometerhsongunNo ratings yet
- FM and Repeaters For The Radio Amateur 3 Printingnbsped CompressDocument236 pagesFM and Repeaters For The Radio Amateur 3 Printingnbsped CompressIliuta JohnNo ratings yet
- WB the+Awesome+MF+WorkbenchDocument72 pagesWB the+Awesome+MF+WorkbenchZé MarcoNo ratings yet
- Intelligent WiringDocument12 pagesIntelligent Wiringg_junk5213No ratings yet
- Build An Infra-Red SnooperscopeDocument8 pagesBuild An Infra-Red SnooperscopeJOHNNo ratings yet
- Elektor 1984 05Document58 pagesElektor 1984 05M.Nadeem Ullah KhanNo ratings yet
- Ironworker E600C Dec2019Document40 pagesIronworker E600C Dec2019italotma100% (1)
- Dielectric Oil and Flushing for Ram EDM: Key Factors for Efficient CuttingDocument10 pagesDielectric Oil and Flushing for Ram EDM: Key Factors for Efficient Cuttingks2000n1No ratings yet
- Cobra Lathe Instruction ManualDocument29 pagesCobra Lathe Instruction ManualGerDen100% (1)
- Physics ProjectDocument6 pagesPhysics ProjectShad MirzaNo ratings yet
- Colour Genera%) Digital Tunin G Scale Mini Drill Conitro: Up To - Date Electronics For Lab and LeisureDocument49 pagesColour Genera%) Digital Tunin G Scale Mini Drill Conitro: Up To - Date Electronics For Lab and Leisuretecchese3996No ratings yet
- Home Made Metal DetectorDocument9 pagesHome Made Metal DetectorDeep PatelNo ratings yet
- Raytheon Radio and Television Recieving Tube Data 1957Document54 pagesRaytheon Radio and Television Recieving Tube Data 1957kgrhoadsNo ratings yet
- HY-DIV268N-5A two-phase hybrid stepper motor drive manualDocument8 pagesHY-DIV268N-5A two-phase hybrid stepper motor drive manualArmin SelimovicNo ratings yet
- Elektor 1988 05Document60 pagesElektor 1988 05M.Nadeem Ullah KhanNo ratings yet
- Sams Photofact CB 90Document123 pagesSams Photofact CB 90Hernan RiveraNo ratings yet
- The Sharp VAWT: Versatile Practice ModelsDocument8 pagesThe Sharp VAWT: Versatile Practice ModelssupermarioprofNo ratings yet
- 144 MHZ Helical Bandpass FilterDocument2 pages144 MHZ Helical Bandpass Filtermnbv23No ratings yet
- Theory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationFrom EverandTheory of Microwave Valves: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- British Special Quality Valves and Electron Tube Devices Data Annual 1964–65From EverandBritish Special Quality Valves and Electron Tube Devices Data Annual 1964–65No ratings yet
- Magnum1 0Document11 pagesMagnum1 0Michał SiwińskiNo ratings yet
- How to Make a Fast Pulse Induction Mono CoilDocument9 pagesHow to Make a Fast Pulse Induction Mono CoilJoão Adelino100% (1)
- Detector de Metais 2 Caixas.Document4 pagesDetector de Metais 2 Caixas.Artur de CastroNo ratings yet
- Building Quality Coil Enclosures for Metal DetectorsDocument7 pagesBuilding Quality Coil Enclosures for Metal Detectorsercan dizdarNo ratings yet
- TGSL - 101 - Part1Document25 pagesTGSL - 101 - Part1sorinn1987No ratings yet
- Alternators Circuit TestingDocument4 pagesAlternators Circuit Testing910pcsupportNo ratings yet
- Building Quality Coil Enclosures for Metal DetectorsDocument7 pagesBuilding Quality Coil Enclosures for Metal Detectorsercan dizdarNo ratings yet
- Exciter Ex2100e AcronymsDocument12 pagesExciter Ex2100e AcronymsShamim AbbasNo ratings yet
- Mid 2 BitsDocument17 pagesMid 2 Bitsss mNo ratings yet
- <!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.01 Transitional//EN" "http://www.w3.org/TR/html4/loose.dtd"> <HTML><HEAD><META HTTP-EQUIV="Content-Type" CONTENT="text/html; charset=iso-8859-1"> <TITLE>ERROR: The requested URL could not be retrieved</TITLE> <STYLE type="text/css"><!--BODY{background-color:#ffffff;font-family:verdana,sans-serif}PRE{font-family:sans-serif}--></STYLE> </HEAD><BODY> <H1>ERROR</H1> <H2>The requested URL could not be retrieved</H2> <HR noshade size="1px"> <P> While trying to process the request: <PRE> TEXT http://www.scribd.com/titlecleaner?title=Bridges_1993compressed.pdf HTTP/1.1 Host: www.scribd.com Proxy-Connection: keep-alive Cache-Control: max-age=0 Accept: */* Origin: http://www.scribd.com X-CSRF-Token: 32c7217e2e3c7d2ff8dfc8507de87c3a2f52331e User-Agent: Mozilla/5.0 (Windows NT 6.0) AppleWebKit/537.22 (KHTML, like Gecko) Chrome/25.0.1364.97 Safari/537.22 X-Requested-With: XMLHttpRequest Referer: http://www.scribd.com/upload-document AccDocument166 pages<!DOCTYPE HTML PUBLIC "-//W3C//DTD HTML 4.01 Transitional//EN" "http://www.w3.org/TR/html4/loose.dtd"> <HTML><HEAD><META HTTP-EQUIV="Content-Type" CONTENT="text/html; charset=iso-8859-1"> <TITLE>ERROR: The requested URL could not be retrieved</TITLE> <STYLE type="text/css"><!--BODY{background-color:#ffffff;font-family:verdana,sans-serif}PRE{font-family:sans-serif}--></STYLE> </HEAD><BODY> <H1>ERROR</H1> <H2>The requested URL could not be retrieved</H2> <HR noshade size="1px"> <P> While trying to process the request: <PRE> TEXT http://www.scribd.com/titlecleaner?title=Bridges_1993compressed.pdf HTTP/1.1 Host: www.scribd.com Proxy-Connection: keep-alive Cache-Control: max-age=0 Accept: */* Origin: http://www.scribd.com X-CSRF-Token: 32c7217e2e3c7d2ff8dfc8507de87c3a2f52331e User-Agent: Mozilla/5.0 (Windows NT 6.0) AppleWebKit/537.22 (KHTML, like Gecko) Chrome/25.0.1364.97 Safari/537.22 X-Requested-With: XMLHttpRequest Referer: http://www.scribd.com/upload-document Acceverest2007No ratings yet
- UV916 TV TunerDocument82 pagesUV916 TV TunerMae PalejaroNo ratings yet
- FSK Modulation & Demodulation ProjectDocument42 pagesFSK Modulation & Demodulation Projectمهيمن الابراهيميNo ratings yet
- Broch1 XP2G ELCA CTE B PDFDocument25 pagesBroch1 XP2G ELCA CTE B PDFJuan MerinoNo ratings yet
- Automatic Voltage Regulator (Avr) : General Description Technical SpecificationDocument4 pagesAutomatic Voltage Regulator (Avr) : General Description Technical SpecificationsabujNo ratings yet
- FM Demodulator Circuit Using PLLDocument13 pagesFM Demodulator Circuit Using PLLashwini100% (1)
- 667 HB 20200 000Document145 pages667 HB 20200 000Rodrigo Francisco León BarríaNo ratings yet
- Estrategia de Compensación de Corriente Armónica Flexible Aplicada en Inversores Fotovoltaicos Monofásicos y Trifásicos.Document12 pagesEstrategia de Compensación de Corriente Armónica Flexible Aplicada en Inversores Fotovoltaicos Monofásicos y Trifásicos.David LondoñoNo ratings yet
- LCD Backlight Inverter ICDocument44 pagesLCD Backlight Inverter ICSorin Cornea100% (1)
- Chapter-1. Introduction To Communication Systems:-: (April-2010) (07) (2.1 & 2.2)Document6 pagesChapter-1. Introduction To Communication Systems:-: (April-2010) (07) (2.1 & 2.2)shaileshNo ratings yet
- Electronics Digest 1987 Summer PDFDocument89 pagesElectronics Digest 1987 Summer PDFAmado ZambranoNo ratings yet
- AM Demodulation (Summary)Document18 pagesAM Demodulation (Summary)ljjbNo ratings yet
- Plant Maintenance, Proof of Performance and Signal Leakage Rev (1) - ADocument255 pagesPlant Maintenance, Proof of Performance and Signal Leakage Rev (1) - AhailemebrahtuNo ratings yet
- OFC Analog Links (Unit 4 Part B)Document15 pagesOFC Analog Links (Unit 4 Part B)Anjali SinhaNo ratings yet
- EST - QS4 Fire Alarm Control Panel Technical Reference Manual PDFDocument138 pagesEST - QS4 Fire Alarm Control Panel Technical Reference Manual PDFPaola PuentesNo ratings yet
- Crystal Video ReceiverDocument24 pagesCrystal Video ReceiverErikÖqvistNo ratings yet
- NFS2 3030 Data Sheet DN - 7070Document8 pagesNFS2 3030 Data Sheet DN - 7070Bto LpzNo ratings yet
- PC Based OscilloscopeDocument3 pagesPC Based OscilloscopeRev. Matthew100% (1)
- The GBD-PLUS' compact glass break detectionDocument2 pagesThe GBD-PLUS' compact glass break detectionDidier Samir GuillenNo ratings yet
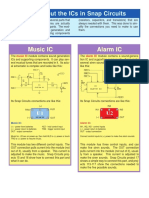
- More About The Ics in Snap Circuits: Music Ic Alarm IcDocument8 pagesMore About The Ics in Snap Circuits: Music Ic Alarm IcJorge MeiniNo ratings yet
- Fire Alarm Control Panel (Linkage Type) : ATL-9000 SERIES ATL-9000-2 ATL-9000-4 ATL-9000-6Document26 pagesFire Alarm Control Panel (Linkage Type) : ATL-9000 SERIES ATL-9000-2 ATL-9000-4 ATL-9000-6SanrasniNo ratings yet
- 2 Marks Ldica NotesDocument8 pages2 Marks Ldica NotesRAJOLI GIRISAI MADHAV100% (2)
- Data Sheet: TEA6823T TEA6825TDocument48 pagesData Sheet: TEA6823T TEA6825TKoleaHanNo ratings yet