You might also like
- Fiber Optic Displacement Sensor PDFDocument2 pagesFiber Optic Displacement Sensor PDFToyaNo ratings yet
- Instrumentation and Sensors PDFDocument120 pagesInstrumentation and Sensors PDFAlkesh GandhiNo ratings yet
- Vibration Detection Using Optical Fiber SensorDocument34 pagesVibration Detection Using Optical Fiber Sensorjasonjames21No ratings yet
- Fiber Optic Components For For Optical Coherence Tomography Oct ApplicationsDocument2 pagesFiber Optic Components For For Optical Coherence Tomography Oct ApplicationsDK PhotonicsNo ratings yet
- Development of A High Cycle Vibration Fatigue Diagnosticsystem With Non-Contactvibration SensingDocument15 pagesDevelopment of A High Cycle Vibration Fatigue Diagnosticsystem With Non-Contactvibration SensingkhabiranNo ratings yet
- Accepted ManuscriptDocument12 pagesAccepted ManuscriptwulanluvspinkNo ratings yet
- SeriesDocument8 pagesSeriesMohamad SolehNo ratings yet
- Geometric Centre Tracking of Tagged Objects Using A Low Power Demodulation Smart Vision SensorDocument11 pagesGeometric Centre Tracking of Tagged Objects Using A Low Power Demodulation Smart Vision Sensorlee_ganeshNo ratings yet
- Appendix A - Fiber Optic SensorsDocument4 pagesAppendix A - Fiber Optic SensorsengshimaaNo ratings yet
- 103-Km-Long Remote Measurements of End Standards Using Low-Coherence Optical-Fiber Tandem Interferometer in Experimental RoomDocument3 pages103-Km-Long Remote Measurements of End Standards Using Low-Coherence Optical-Fiber Tandem Interferometer in Experimental Roomtirasi1214No ratings yet
- Fiber Optic SensorsDocument10 pagesFiber Optic SensorsPerumal NamasivayamNo ratings yet
- Pyroelectric InfraRed Sensors Based Distance EstimDocument5 pagesPyroelectric InfraRed Sensors Based Distance EstimCaxas BikersNo ratings yet
- Precision Nano Displacement System (PNDS)Document11 pagesPrecision Nano Displacement System (PNDS)Blue AmigaNo ratings yet
- Fiber Optic Sensors: Light Emitting DiodeDocument6 pagesFiber Optic Sensors: Light Emitting DiodecoolkannaNo ratings yet
- RM3100 Marketing Sheet PDFDocument2 pagesRM3100 Marketing Sheet PDFkostya_4524No ratings yet
- The Low Cost Proton Precession Magnetometer Developed at The Indian Institute of GeomagnetismDocument12 pagesThe Low Cost Proton Precession Magnetometer Developed at The Indian Institute of GeomagnetismDewi Rat'RiNo ratings yet
- DevelopmentofaLinearMicro InductosynSensorDocument4 pagesDevelopmentofaLinearMicro InductosynSensorMarcelo BaptistaNo ratings yet
- Mts SensorsDocument6 pagesMts SensorsAmi ne-FNo ratings yet
- An Overview of Steam Turbine Blade Vibration Monitoring System (BVMS)Document3 pagesAn Overview of Steam Turbine Blade Vibration Monitoring System (BVMS)SebastianNo ratings yet
- Design and Analysis of Optical Ringresonator For Bio-Sensing ApplicationDocument5 pagesDesign and Analysis of Optical Ringresonator For Bio-Sensing ApplicationDr. Shwetha MNo ratings yet
- A Novel Technique For Measuring The Pulsewidth of Nanosecond Laser PulsesDocument4 pagesA Novel Technique For Measuring The Pulsewidth of Nanosecond Laser PulsesGindra WinaldiNo ratings yet
- Article 99Document7 pagesArticle 99Hoàng Nguyễn BáNo ratings yet
- 202003231745311502rajesh Shukla Fiber Optic SensorsDocument19 pages202003231745311502rajesh Shukla Fiber Optic SensorsIlavarasan TamizhNo ratings yet
- Vibration Disturbance Localization Using A 2012 y SergeuiDocument4 pagesVibration Disturbance Localization Using A 2012 y SergeuiAlfonso GarciaNo ratings yet
- Fiber Optic SensorDocument21 pagesFiber Optic SensorFahru Din Ahmad100% (1)
- FSO System Modules and Design Issues: January 2017Document29 pagesFSO System Modules and Design Issues: January 2017Blade OverNo ratings yet
- Contrast Computation Methods For Interferometric Measurement of Sensor Modulation Transfer FunctionDocument15 pagesContrast Computation Methods For Interferometric Measurement of Sensor Modulation Transfer FunctionWharton LaelandeNo ratings yet
- 1138 FullDocument7 pages1138 Full6dttfhjzbfNo ratings yet
- A Fiber Optical Sensor For Non-Contact Vibration MeasurementsDocument2 pagesA Fiber Optical Sensor For Non-Contact Vibration MeasurementsEd TrawtmamNo ratings yet
- 3Document6 pages3Phong Đào Văn HoàngNo ratings yet
- D1.2 - Specification Report On Optical SensorsDocument20 pagesD1.2 - Specification Report On Optical SensorsSaqib HashmiNo ratings yet
- 06 - Chapter 1 PDFDocument16 pages06 - Chapter 1 PDFhelenarajNo ratings yet
- Pierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineDocument4 pagesPierced Sensor For A Nano-Microscope (NMSC) : R. Sklyar Verchratskogo St. 15-1, Lviv 79010 UkraineFrontiers0% (1)
- Continuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkDocument8 pagesContinuous Vibration Monitoring System Using Gaussian Beams and Artificial Neural NetworkAbigor45No ratings yet
- OC Lab FileDocument22 pagesOC Lab FileSati SinghNo ratings yet
- Development of Phased-Array Ultrasonic Testing ProbeDocument5 pagesDevelopment of Phased-Array Ultrasonic Testing ProbeabdNo ratings yet
- 3S Engineering CapabilityDocument19 pages3S Engineering CapabilitysisesetNo ratings yet
- Implementation of Inductive Proximity Sensors in ADocument4 pagesImplementation of Inductive Proximity Sensors in ALalitNo ratings yet
- EI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical SensorDocument21 pagesEI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical Sensorsyed1188No ratings yet
- EI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical SensorDocument21 pagesEI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical Sensorsyed1188100% (1)
- EI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical SensorDocument21 pagesEI 8075 Fibre Optics and Laser Instruments Industrial Application of Fiber Optical Sensorsyed1188No ratings yet
- Construction and Characterization of A Titanium:sapphire CW Laser System With KHZ LinewidthDocument9 pagesConstruction and Characterization of A Titanium:sapphire CW Laser System With KHZ LinewidthbillNo ratings yet
- Fiber optic sensors: An introduction and overviewDocument12 pagesFiber optic sensors: An introduction and overviewhelenarajNo ratings yet
- A Fiber Optic Interferometric Sensor For Dynamic MeasurementDocument4 pagesA Fiber Optic Interferometric Sensor For Dynamic MeasurementEd TrawtmamNo ratings yet
- Acousto-Optic Catheter Tracking Sensor For Interventional MRI ProceduresDocument7 pagesAcousto-Optic Catheter Tracking Sensor For Interventional MRI ProceduresasifnewazuccNo ratings yet
- Journal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationDocument12 pagesJournal of Synchrotron Radiation - 2020 - Berujon - X Ray Optics and Beam Characterization Using Random ModulationLeafar OllebarNo ratings yet
- Development of Fiber Optic Radiation Monitor using Plastic Scintillation Fibers (1)Document9 pagesDevelopment of Fiber Optic Radiation Monitor using Plastic Scintillation Fibers (1)deellNo ratings yet
- 08572252Document4 pages08572252angelikjoliehNo ratings yet
- Comprehensive Analysis of Magnet Defect Detection Through Leakage Flux MonitoringDocument10 pagesComprehensive Analysis of Magnet Defect Detection Through Leakage Flux MonitoringNAOUREZ BEN HADJNo ratings yet
- A Flexible, Planar-Coil-Based Sensor For Through-Shaft Angle SensingDocument8 pagesA Flexible, Planar-Coil-Based Sensor For Through-Shaft Angle SensingakruNo ratings yet
- Fibre-Optic Sagnac Interferometer Real Sensor Physical QuantitiesDocument4 pagesFibre-Optic Sagnac Interferometer Real Sensor Physical QuantitiesThiago CoelhoNo ratings yet
- A Novel Reflective Fiber Optic Current Sensor and Error Characteristics in The Key Optical ComponentsDocument8 pagesA Novel Reflective Fiber Optic Current Sensor and Error Characteristics in The Key Optical ComponentsGuru MishraNo ratings yet
- 2013 - A Reivew On Various Types of Sensors applications-IJERTCONV1IS02017Document4 pages2013 - A Reivew On Various Types of Sensors applications-IJERTCONV1IS02017deepakNo ratings yet
- Fiber Optic Sensors and Their ApplicationsDocument49 pagesFiber Optic Sensors and Their ApplicationsSivanantharaja0% (3)
- Analog Processing Based Vibration Measurement Technique Using Michelson InterferometerDocument7 pagesAnalog Processing Based Vibration Measurement Technique Using Michelson Interferometeraufi wowoNo ratings yet
- Optical Fiber Sensing Technology - Visualizing The Real World (Deepak & Abhishek)Document4 pagesOptical Fiber Sensing Technology - Visualizing The Real World (Deepak & Abhishek)ME B 139 ABHISHEK RAJNo ratings yet
- Fiber Optic Micro DisplacementDocument3 pagesFiber Optic Micro DisplacementshashankpptNo ratings yet
- Introduction: An Optical Cavity or Optical Resonator Is An Arrangement of Mirrors That FormsDocument3 pagesIntroduction: An Optical Cavity or Optical Resonator Is An Arrangement of Mirrors That Formssumanta.kundu318020No ratings yet
- Optical Communication Lab SpecificationsDocument6 pagesOptical Communication Lab SpecificationsVishnupriya ChowdharyNo ratings yet
- Ultrafast All-Optical Signal Processing DevicesFrom EverandUltrafast All-Optical Signal Processing DevicesDr. Hiroshi IshikawaRating: 5 out of 5 stars5/5 (1)
- 4 Summery of Near-Field Radiative Heat TransferDocument4 pages4 Summery of Near-Field Radiative Heat Transfermd shofiqulNo ratings yet
- 6 Near-Field Thermal Radiation Between Doped Silicon Plates at Nanoscale GapsDocument2 pages6 Near-Field Thermal Radiation Between Doped Silicon Plates at Nanoscale Gapsmd shofiqulNo ratings yet
- 5 Parallel-Plate Submicron Gap Formed by Micromachined Low-Density Pillars For Near-Field Radiative Heat TransferDocument5 pages5 Parallel-Plate Submicron Gap Formed by Micromachined Low-Density Pillars For Near-Field Radiative Heat Transfermd shofiqulNo ratings yet
- 3 Summery of Near-Field Radiative Heat TransferDocument7 pages3 Summery of Near-Field Radiative Heat Transfermd shofiqulNo ratings yet
- 7 Near-Field Radiative Heat Transfer Between Two Parallel SiO2 Plates With andDocument3 pages7 Near-Field Radiative Heat Transfer Between Two Parallel SiO2 Plates With andmd shofiqulNo ratings yet
- 5 Summery of Near-Field Radiative Heat TransferDocument4 pages5 Summery of Near-Field Radiative Heat Transfermd shofiqulNo ratings yet
- 2 Near-Field Radiative Heat Transfer Between Macroscopic Planar SurfacesDocument4 pages2 Near-Field Radiative Heat Transfer Between Macroscopic Planar Surfacesmd shofiqulNo ratings yet
- 3 Cryogenic Apparatus For Study of Near-Field Heat TransferDocument6 pages3 Cryogenic Apparatus For Study of Near-Field Heat Transfermd shofiqulNo ratings yet
- 4 Strong Near-Field Enhancement of Radiative Heat Transfer Between Metallic SurfacesDocument5 pages4 Strong Near-Field Enhancement of Radiative Heat Transfer Between Metallic Surfacesmd shofiqulNo ratings yet
- A Capacitive Sensor For The Measurement ofDocument9 pagesA Capacitive Sensor For The Measurement ofmd shofiqulNo ratings yet
- Nano-Positioner: MD Shofiqul Islam University of MaineDocument9 pagesNano-Positioner: MD Shofiqul Islam University of Mainemd shofiqulNo ratings yet
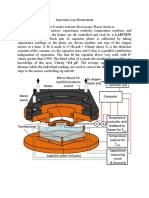
- Separation Gap MeasurementDocument4 pagesSeparation Gap Measurementmd shofiqulNo ratings yet
- Development of A Real Time Closed Loop Nano-Positioning System Embedded With A Capacitive SensorDocument11 pagesDevelopment of A Real Time Closed Loop Nano-Positioning System Embedded With A Capacitive Sensormd shofiqulNo ratings yet
- 6G7V0028-1CWK100-Principles-Practices-Cyber Security-ASSIGNMENT-Description-2023-2024-UpdateDocument9 pages6G7V0028-1CWK100-Principles-Practices-Cyber Security-ASSIGNMENT-Description-2023-2024-UpdateMayukh SahaNo ratings yet
- Monitor driver informationDocument1,071 pagesMonitor driver informations npNo ratings yet
- Anexo 1 - Generac SG625-PG563 PDFDocument6 pagesAnexo 1 - Generac SG625-PG563 PDFJuly E. Maldonado M.No ratings yet
- Spare Parts and Project For Scheidt and BachmannDocument223 pagesSpare Parts and Project For Scheidt and Bachmannnachit01No ratings yet
- Soil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)Document6 pagesSoil Mechanics I Cee 305: 2.0 Consistency Limit (Atterberge Limit)ABUBAKAR SANI HABIBUNo ratings yet
- WCFX-E Guide SpecificationDocument3 pagesWCFX-E Guide SpecificationaftabNo ratings yet
- Method Taken From Spirax Sarco Technical Guidance: Calculation No.: Sheet: Device Tag: DescriptionDocument9 pagesMethod Taken From Spirax Sarco Technical Guidance: Calculation No.: Sheet: Device Tag: Descriptionfahmi0% (1)
- Transforming Education in The Digital AgeDocument4 pagesTransforming Education in The Digital AgeAnalyn AgotoNo ratings yet
- SM - Project Report - Group-11Document15 pagesSM - Project Report - Group-110463SanjanaNo ratings yet
- B. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Document73 pagesB. Tech-in-Computer-Science-and-Engineering-Data-Science-Thir-Year-2023-24Sushant5inghrajputNo ratings yet
- SAUDI ARAMCO OIL COMPANY PLANNER & CONTROL ENGINEER SUNNYDocument2 pagesSAUDI ARAMCO OIL COMPANY PLANNER & CONTROL ENGINEER SUNNYJojo DejucosNo ratings yet
- IBP - Help For Standard Keyfigures PDFDocument311 pagesIBP - Help For Standard Keyfigures PDFSaurabh KulkarniNo ratings yet
- About UsDocument16 pagesAbout UsManam BerampuramNo ratings yet
- Writing A Concept Paper-1Document29 pagesWriting A Concept Paper-1Yhazmin Iris IlustrisimoNo ratings yet
- 06na NW Parts BreakdownDocument14 pages06na NW Parts BreakdownAmaurys Centeno100% (6)
- Networks Pre Connection Attacks PDFDocument15 pagesNetworks Pre Connection Attacks PDFaniket kasturiNo ratings yet
- Job Vacancies AdvertisementDocument28 pagesJob Vacancies AdvertisementRobert AzihembaNo ratings yet
- Unit1 DBMSDocument64 pagesUnit1 DBMSRaj SuraseNo ratings yet
- Progress Test 02Document21 pagesProgress Test 02andrewlaurenNo ratings yet
- Multi-Disc Dehydrators: MDQ / MDC / JDDocument11 pagesMulti-Disc Dehydrators: MDQ / MDC / JDmichie37No ratings yet
- Electric MachineDocument26 pagesElectric MachinealexNo ratings yet
- Microsoft Excel Exam Assessment Questions: Important InstructionsDocument3 pagesMicrosoft Excel Exam Assessment Questions: Important InstructionsKaartiikBenNo ratings yet
- LESSON 2 Roles of Educational Technology in LearningDocument14 pagesLESSON 2 Roles of Educational Technology in LearningJenny SamoranosNo ratings yet
- Ultramatch Pro Src2496: User ManualDocument16 pagesUltramatch Pro Src2496: User ManualLuka TrengovskiNo ratings yet
- CT18 Spare Part Book Without EngineDocument86 pagesCT18 Spare Part Book Without EngineTSPSRL Import ExportNo ratings yet
- 9Document36 pages9vscolegit shoppeNo ratings yet
- Jadenlimkaijie w1Document4 pagesJadenlimkaijie w1api-518329636No ratings yet
- Q3876 Common Questions About ActiveX Controls in CitectSCADADocument5 pagesQ3876 Common Questions About ActiveX Controls in CitectSCADAdesrico20039088No ratings yet
- Properties of The Operations On IntegersDocument23 pagesProperties of The Operations On Integersimee marayagNo ratings yet
- STS New OBE SyllabusDocument14 pagesSTS New OBE Syllabusgalileo jr roma100% (4)