You might also like
- Cisco Ccna Presentation SlideDocument623 pagesCisco Ccna Presentation SlideKomal Ahmad100% (1)
- Ev 3 Solar StationDocument52 pagesEv 3 Solar Stationavira0002No ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- MPLAB Blockset SimulinkDocument58 pagesMPLAB Blockset SimulinkMohamed NourNo ratings yet
- FloodDocument9 pagesFloodapi-352767278No ratings yet
- Geofencing On The Real-Time GPS Tracking System and Improving GPS Accuracy With Moving Average, Kalman Filter and Logistic Regression AnalysisDocument7 pagesGeofencing On The Real-Time GPS Tracking System and Improving GPS Accuracy With Moving Average, Kalman Filter and Logistic Regression AnalysisHakiem HalimNo ratings yet
- GPS INS Urban SettingDocument9 pagesGPS INS Urban SettingLogesan SrinivasaluNo ratings yet
- Inertial Surveying SystemDocument4 pagesInertial Surveying SystemKobe Conrad AbelleraNo ratings yet
- GPS Practical Field Guide For SurveyorsDocument186 pagesGPS Practical Field Guide For Surveyorscrystalthomas1No ratings yet
- Answers 5 QuestionsDocument4 pagesAnswers 5 QuestionsMesba HoqueNo ratings yet
- GPS Uses in Construction ProjectsDocument22 pagesGPS Uses in Construction ProjectsArpit PatelNo ratings yet
- GPS: Working Principle and Its ApplicationsDocument15 pagesGPS: Working Principle and Its ApplicationsVikas SinghNo ratings yet
- GPS Surveys: Prepared ByDocument12 pagesGPS Surveys: Prepared ByBakhtiyar Q.KhawajaNo ratings yet
- Paper Presentation On Global Positioning SystemDocument45 pagesPaper Presentation On Global Positioning Systemakki11190No ratings yet
- Real-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Document10 pagesReal-Time Kinematic Positioning With NASA's Internet-Based Global Differential GPS (IGDG)Hammam AbdurrahmanNo ratings yet
- GPS Power PointDocument18 pagesGPS Power PointAtri GulatiNo ratings yet
- Concept of Geo-Informatics: Chapter - 1Document6 pagesConcept of Geo-Informatics: Chapter - 1SrikantNo ratings yet
- Document From S@nj@yDocument20 pagesDocument From S@nj@yshivam yadavNo ratings yet
- Gps SurveyDocument13 pagesGps SurveyBakhtiyar Q.KhawajaNo ratings yet
- GPS SurveyingDocument5 pagesGPS Surveyingsaravanakumar100% (1)
- Concept of Geo-Informatics: Chapter - 1Document25 pagesConcept of Geo-Informatics: Chapter - 1Bharath HRNo ratings yet
- Geo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataDocument16 pagesGeo-Information: Tracking 3D Moving Objects Based On GPS/IMU Navigation Solution, Laser Scanner Point Cloud and GIS DataGopi Krishna ValluriNo ratings yet
- ECE Senior Capstone Project Strapdown INSDocument3 pagesECE Senior Capstone Project Strapdown INSaliNo ratings yet
- GIS Guidelines Data CollectionDocument25 pagesGIS Guidelines Data CollectionKiruba Sankar VaradharajanNo ratings yet
- Using Global Positioning Systems (GPS) : How It Works, Limitations, and Some Guidelines For OperationDocument45 pagesUsing Global Positioning Systems (GPS) : How It Works, Limitations, and Some Guidelines For OperationRajNo ratings yet
- Subject:-Global Positioning System (GPS) : Guided By:-Samir Thakkar Prepared By:-Raj BhindeDocument22 pagesSubject:-Global Positioning System (GPS) : Guided By:-Samir Thakkar Prepared By:-Raj Bhinderaj_bhindeNo ratings yet
- Presentation 1Document11 pagesPresentation 1Rustam FullelNo ratings yet
- Applications of GPSDocument3 pagesApplications of GPSDinesh KannanNo ratings yet
- Guochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - ChapterDocument15 pagesGuochang Xu, Yan Xu - GPS Theory, Algorithms and Applications (2016) - Chapternaura ANo ratings yet
- Gps Receiver Design TutorialDocument3 pagesGps Receiver Design TutorialPete100% (1)
- Gps (Global Positioning System)Document14 pagesGps (Global Positioning System)Ekansh GuptaNo ratings yet
- 06.20246.jau Hsiung WangDocument238 pages06.20246.jau Hsiung WangTrinh Luong MienNo ratings yet
- A Review of Navigation Systems (Integration and Algorithms)Document17 pagesA Review of Navigation Systems (Integration and Algorithms)amguardia100% (1)
- GPS - Global Positioning SystemDocument19 pagesGPS - Global Positioning SystemS Bharadwaj ReddyNo ratings yet
- Global Positioning SystemDocument6 pagesGlobal Positioning SystemAlyssa Alexis RamosNo ratings yet
- PHD Thesis AngrisanoDocument168 pagesPHD Thesis AngrisanoĐạt Hoàng LễNo ratings yet
- Mobile ComputingDocument11 pagesMobile Computingapi-19799369No ratings yet
- Accurate Indoor Positioning Using Learning Prediction SensorsDocument27 pagesAccurate Indoor Positioning Using Learning Prediction Sensorsvalerio modugnoNo ratings yet
- Detecting Orientation and Displacement Using Smartphone SensorsDocument11 pagesDetecting Orientation and Displacement Using Smartphone SensorsKimNo ratings yet
- Sensors: A Novel Walking Detection and Step Counting Algorithm Using Unconstrained SmartphonesDocument15 pagesSensors: A Novel Walking Detection and Step Counting Algorithm Using Unconstrained Smartphonesabhiken1994No ratings yet
- GPS Applications GuideDocument14 pagesGPS Applications GuideSinu VasuNo ratings yet
- ms GPSDocument21 pagesms GPSouaskayanNo ratings yet
- Quaternion-Based Extended Kalman Filter For Determining Orientation by Inertial and Magnetic SensingDocument11 pagesQuaternion-Based Extended Kalman Filter For Determining Orientation by Inertial and Magnetic SensingVictor PassosNo ratings yet
- Gps - Uses and AdvantagesDocument15 pagesGps - Uses and AdvantagesArun100% (1)
- ReportDocument27 pagesReportgamer GamesloverNo ratings yet
- Quaternion-Based Extended Kalman Filter For Determining Orientation by Inertial and Magnetic SensingDocument11 pagesQuaternion-Based Extended Kalman Filter For Determining Orientation by Inertial and Magnetic Sensingnguyen_mecha100% (1)
- GPS Project ReportDocument21 pagesGPS Project Reportrajansoni5675% (4)
- Engleski Jezik Seminarski RadDocument19 pagesEngleski Jezik Seminarski RadDjoledjokicNo ratings yet
- ModernSurveyInstruments ICMS2006 08092006Document18 pagesModernSurveyInstruments ICMS2006 08092006Rth CMglNo ratings yet
- MODERN SURVEY INSTRUMENTS FOR MINE MAPPINGDocument15 pagesMODERN SURVEY INSTRUMENTS FOR MINE MAPPINGJohNo ratings yet
- Applications of GPS Technologies To Field Sports, Aughey (2011)Document17 pagesApplications of GPS Technologies To Field Sports, Aughey (2011)john lewisNo ratings yet
- Gps Data Logger Ew 11 09Document7 pagesGps Data Logger Ew 11 09henrydav_oNo ratings yet
- Sensors 19 01618Document18 pagesSensors 19 01618Frank FrunkNo ratings yet
- GPS (Global Positioning System) - Andi English-FinalDocument38 pagesGPS (Global Positioning System) - Andi English-FinalAndi AnriansyahNo ratings yet
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNo ratings yet
- The SatNav Users Guide to Navigation and Mapping Using GPSFrom EverandThe SatNav Users Guide to Navigation and Mapping Using GPSRating: 1 out of 5 stars1/5 (2)
- Global Positioning System (GPS)Document13 pagesGlobal Positioning System (GPS)ratheeshbrNo ratings yet
- Positioning: GlobalDocument14 pagesPositioning: GlobalAbdul QuddusNo ratings yet
- Gps & Its ApplicationsDocument6 pagesGps & Its ApplicationsjagamohanNo ratings yet
- GPS (Global Positioning System) : Prepared By: Ashish Gupta & Latish PatelDocument19 pagesGPS (Global Positioning System) : Prepared By: Ashish Gupta & Latish PatelSunil PillaiNo ratings yet
- Global Positioning Systems, Inertial Navigation, and IntegrationFrom EverandGlobal Positioning Systems, Inertial Navigation, and IntegrationRating: 1 out of 5 stars1/5 (1)
- How To Pick The Perfect Portable GPS Unit A Guide To Stress Free TravelFrom EverandHow To Pick The Perfect Portable GPS Unit A Guide To Stress Free TravelNo ratings yet
- Geoinformatics for Geosciences: Advanced Geospatial Analysis using RS, GIS and Soft ComputingFrom EverandGeoinformatics for Geosciences: Advanced Geospatial Analysis using RS, GIS and Soft ComputingNikolaos StathopoulosNo ratings yet
- CTNNNN82M10E017Y-PhD Tesi Nino Catena v2.3 FinalDocument139 pagesCTNNNN82M10E017Y-PhD Tesi Nino Catena v2.3 FinalMohamed NourNo ratings yet
- The Kalman Filter - An Algorithm For Mak..Document19 pagesThe Kalman Filter - An Algorithm For Mak..Mohamed NourNo ratings yet
- Mplab Xc16 User'S Guide For Embedded Engineers Mplab XC16 User's Guide For Embedded EngineersDocument38 pagesMplab Xc16 User'S Guide For Embedded Engineers Mplab XC16 User's Guide For Embedded EngineersMarcosAntônioSilvaNo ratings yet
- Errata Linera DynDocument15 pagesErrata Linera DynMohamed NourNo ratings yet
- DS70600 InterruptsDocument40 pagesDS70600 InterruptstreaxNo ratings yet
- Migrating Your Application To MPLAB C30 v1.33Document5 pagesMigrating Your Application To MPLAB C30 v1.33Mohamed NourNo ratings yet
- DS70600 InterruptsDocument40 pagesDS70600 InterruptstreaxNo ratings yet
- Errata Linera DynDocument15 pagesErrata Linera DynMohamed NourNo ratings yet
- 00001770a PDFDocument18 pages00001770a PDFChetan KotwalNo ratings yet
- A Tutorial On Implementing Kalman Filters With Commonly Used BlocksDocument9 pagesA Tutorial On Implementing Kalman Filters With Commonly Used BlocksMohamed NourNo ratings yet
- Electronics 10 01659Document10 pagesElectronics 10 01659Mohamed NourNo ratings yet
- PIC PlocaDocument36 pagesPIC PlocaNemanja SlijepčevićNo ratings yet
- Sensors 20 04126Document18 pagesSensors 20 04126Mohamed NourNo ratings yet
- Mikromedia Dspic33 Manual v110cDocument44 pagesMikromedia Dspic33 Manual v110cMohamed NourNo ratings yet
- Programming DsPIC Digital Signal Controllers in CDocument289 pagesProgramming DsPIC Digital Signal Controllers in Cthienthuy232No ratings yet
- Electronics 10 01659Document10 pagesElectronics 10 01659Mohamed NourNo ratings yet
- Programming DsPIC in C - Free Online Book - MikroElektronikaDocument170 pagesProgramming DsPIC in C - Free Online Book - MikroElektronikaLuis Armando Reyes Cardoso100% (2)
- PICProgramming Getting StartedDocument7 pagesPICProgramming Getting StartedMohamed NourNo ratings yet
- HabilitationDocument186 pagesHabilitationAland MediaNo ratings yet
- Zapi H2B Autoelevador Heli PDFDocument67 pagesZapi H2B Autoelevador Heli PDFcolive1No ratings yet
- Bca Appu PDFDocument17 pagesBca Appu PDFATHULNo ratings yet
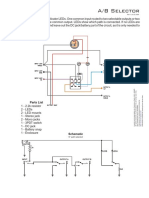
- A/B Selector: Parts ListDocument1 pageA/B Selector: Parts ListGiannis zmNo ratings yet
- An RTL Power Optimization Technique Base PDFDocument4 pagesAn RTL Power Optimization Technique Base PDFmaniNo ratings yet
- Royal College Grade 08 Geography First Term Paper English MediumDocument7 pagesRoyal College Grade 08 Geography First Term Paper English MediumNimali Dias67% (3)
- Data For Tightening Torque: LubricantDocument5 pagesData For Tightening Torque: LubricantAtanasio PerezNo ratings yet
- Introduction to Weibull Analysis for Reliability ImprovementDocument2 pagesIntroduction to Weibull Analysis for Reliability ImprovementCesar ChpNo ratings yet
- Algebra 3 Principles and Sample Problems: 3.1 Probability 3.2 Statistics 3.3 Problems For SolutionsDocument24 pagesAlgebra 3 Principles and Sample Problems: 3.1 Probability 3.2 Statistics 3.3 Problems For SolutionsKrisha Jean MacalinoNo ratings yet
- Ramsey Mercury Free Tilt Sensor 8054.0514 CODocument4 pagesRamsey Mercury Free Tilt Sensor 8054.0514 COlf123No ratings yet
- MS2680-2017 Energy Efficiency and Use of Renewable Energy For Residential BuildingsDocument61 pagesMS2680-2017 Energy Efficiency and Use of Renewable Energy For Residential BuildingsChern Yue EweNo ratings yet
- + 20db/decade High-Pass Filter (1Document26 pages+ 20db/decade High-Pass Filter (1Rashid ShababNo ratings yet
- HeatDocument31 pagesHeatnicky1213a100% (1)
- DRIVINGDocument4 pagesDRIVINGMarcelino ZarateNo ratings yet
- Android KMSGDocument62 pagesAndroid KMSGraimanalmughnii67No ratings yet
- Immunofluorescence Tests: Direct and IndirectDocument489 pagesImmunofluorescence Tests: Direct and IndirectmeskiNo ratings yet
- ACE Brochure - Final - June - 4 - 2013 PDFDocument16 pagesACE Brochure - Final - June - 4 - 2013 PDFOrlando FloresNo ratings yet
- Math Stars Grade 5Document40 pagesMath Stars Grade 5Rivka Share50% (2)
- Configuring SQL Server 2005 For Use With ShipConstructor - ShipConstructor Knowledge Base - ShipConstructor KnowledgebaseDocument8 pagesConfiguring SQL Server 2005 For Use With ShipConstructor - ShipConstructor Knowledge Base - ShipConstructor KnowledgebaseafandybaharuddinNo ratings yet
- Seismic Design and Retrofit of Piping SystemsDocument119 pagesSeismic Design and Retrofit of Piping Systemsv100% (1)
- 3rd Quarter Mathematics Home Take Final Exam For Grade 10Document4 pages3rd Quarter Mathematics Home Take Final Exam For Grade 10John DejuNo ratings yet
- Byte 7 6 5 4 3 2 1 0 1 Opcode D W 2 Reg R/M 3 (Optional) 4 (Optional) 5 (Optional) 6 (Optional)Document8 pagesByte 7 6 5 4 3 2 1 0 1 Opcode D W 2 Reg R/M 3 (Optional) 4 (Optional) 5 (Optional) 6 (Optional)Mohamed HegazyNo ratings yet
- 14EIT72 Instrumentation System Design UNIT-V - P&I Diagrams and Instrument InstallationDocument38 pages14EIT72 Instrumentation System Design UNIT-V - P&I Diagrams and Instrument Installationksjanarthanan_sriNo ratings yet
- PU11 Computer Science Notes - ExcelDocument4 pagesPU11 Computer Science Notes - Excelgautham28No ratings yet
- Whats Map ProjectionDocument19 pagesWhats Map Projectionmahmoud abdelrahmanNo ratings yet
- Inf311 01 42016022Document12 pagesInf311 01 42016022Hazem QaedNo ratings yet
- Resume Ekonometrika Bab 2Document6 pagesResume Ekonometrika Bab 2Firsa AuliaNo ratings yet