You might also like
- Automatic Number Plate Recognition: Fundamentals and ApplicationsFrom EverandAutomatic Number Plate Recognition: Fundamentals and ApplicationsNo ratings yet
- Hawkeye Systems: Scaleable Survey SolutionsDocument16 pagesHawkeye Systems: Scaleable Survey SolutionsSwapnendra SrivastavaNo ratings yet
- Technical Paper - IPWE 2018 PDFDocument410 pagesTechnical Paper - IPWE 2018 PDFSantosh IyerNo ratings yet
- Automatic evaluation of pavement and side areasDocument7 pagesAutomatic evaluation of pavement and side areasanilNo ratings yet
- Internship ReportDocument15 pagesInternship ReportAravind KunchaeNo ratings yet
- Automatic Number Plate RecognitionDocument16 pagesAutomatic Number Plate RecognitionVipin BaliyanNo ratings yet
- Image Processing Applied To TrafficDocument13 pagesImage Processing Applied To TrafficDivya SreeNo ratings yet
- Literature SurveyDocument4 pagesLiterature SurveyTry TryNo ratings yet
- Robust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDocument6 pagesRobust and Efficient Multi-Object Detection and Tracking For Vehicle Perception Systems Using Radar and CameraDivine Grace BurmalNo ratings yet
- Sensors in ADASDocument7 pagesSensors in ADASKhadija El AmouryNo ratings yet
- CAR NUMBER PLATE RECOGNITION SYSTEMDocument87 pagesCAR NUMBER PLATE RECOGNITION SYSTEMSudheer Goud80% (5)
- Gururaj h b Bada 2 (12)Document14 pagesGururaj h b Bada 2 (12)guruswami462No ratings yet
- A Real-Time License Plate Detection System For Parking AccessDocument10 pagesA Real-Time License Plate Detection System For Parking AccessMahmut AykaçNo ratings yet
- IT in Maintenance of RoadsDocument24 pagesIT in Maintenance of RoadsPMGSYP1 NIRDANo ratings yet
- Aplikasi Parkir CerdasDocument4 pagesAplikasi Parkir CerdasMuhammadFahmiNo ratings yet
- Autonomous CarDocument16 pagesAutonomous CarDeepak MeenaNo ratings yet
- Abstract WSNsDocument5 pagesAbstract WSNsShaileshNo ratings yet
- Intelligent License Plate Recognition System Using Neural NetworksDocument7 pagesIntelligent License Plate Recognition System Using Neural NetworkssnehalNo ratings yet
- Autonomous Robots PDFDocument8 pagesAutonomous Robots PDFEduard FlorinNo ratings yet
- Automotive Navigation SystemsDocument15 pagesAutomotive Navigation SystemsVarun GanapathyNo ratings yet
- CNN Detects Lane Weaving and Vehicle PlatesDocument9 pagesCNN Detects Lane Weaving and Vehicle PlatesMasoumeh VahediNo ratings yet
- Obstacle Detection Using Stereo VisionDocument56 pagesObstacle Detection Using Stereo Visionsharukj khanNo ratings yet
- A Real Time Approach For Indian Road Ana PDFDocument10 pagesA Real Time Approach For Indian Road Ana PDFMAHESH D KRISHNANNo ratings yet
- Icaihc 2023 32Document10 pagesIcaihc 2023 32svaishnavi112003No ratings yet
- Detection of Indian Traffic SignDocument6 pagesDetection of Indian Traffic SignIJSTENo ratings yet
- Automatic License Plate Recognition (ALPR) : A State-of-the-Art ReviewDocument15 pagesAutomatic License Plate Recognition (ALPR) : A State-of-the-Art ReviewAnshu ManNo ratings yet
- 3.KRS036 Final SubmissionDocument6 pages3.KRS036 Final SubmissionAravind MikeNo ratings yet
- Vehicle Tracking System For Commercial VehiclesDocument6 pagesVehicle Tracking System For Commercial VehiclesNIET Journal of Engineering & Technology(NIETJET)No ratings yet
- Real Tie M Gps Gprs Based Vehicle Tracking SystemDocument6 pagesReal Tie M Gps Gprs Based Vehicle Tracking SystemSruthi ReddyNo ratings yet
- Report Number Plate RecognitionDocument51 pagesReport Number Plate Recognitionmadhwan sharmaNo ratings yet
- Design & Analysis of Vehicle Speed Control Unit Using RF TechnologyDocument7 pagesDesign & Analysis of Vehicle Speed Control Unit Using RF TechnologyVrushabh Madanlal JainNo ratings yet
- Agv and fms-36-47Document12 pagesAgv and fms-36-47Prabhu VNo ratings yet
- Report Number Plate RecognitionDocument51 pagesReport Number Plate RecognitionThe MindNo ratings yet
- Curve Path Detection in Autonomous Vehicle Using Deep LearningDocument6 pagesCurve Path Detection in Autonomous Vehicle Using Deep LearningJOSECARLOS RAMIREZ BREÑANo ratings yet
- Road surfaceDocument32 pagesRoad surfaceMageshNo ratings yet
- Task 4 Video SensorsDocument16 pagesTask 4 Video Sensorsmohanad_j_jindeelNo ratings yet
- A N e Fficient S Ystem For F Orward C Ollision A Voidance Using L Ow C Ost C Amera & e Mbedded P Rocessor in A Utonomous V EhiclesDocument8 pagesA N e Fficient S Ystem For F Orward C Ollision A Voidance Using L Ow C Ost C Amera & e Mbedded P Rocessor in A Utonomous V Ehiclesacii journalNo ratings yet
- Vol 6 Issue 4 2Document8 pagesVol 6 Issue 4 2santhosh santhoshNo ratings yet
- SPM ReoprtDocument35 pagesSPM ReoprtRaviraj GardiNo ratings yet
- Vivekananda ISSUE TRACKING GPS Vehicle Tracking SystemDocument28 pagesVivekananda ISSUE TRACKING GPS Vehicle Tracking SystemdkishoreNo ratings yet
- Rutgers IEEE Student Branch 2011 IGVC team reportDocument15 pagesRutgers IEEE Student Branch 2011 IGVC team reportKenDaniswaraNo ratings yet
- SSRN Id3573876Document8 pagesSSRN Id3573876anonymous010303No ratings yet
- Ijert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsDocument6 pagesIjert Ijert: Vehicle License Plate Detection From Video Using Edge Detection and Morphological OperatorsInderjeet SinghNo ratings yet
- 6 - Lane Recognition Technique Using Hough TransformDocument6 pages6 - Lane Recognition Technique Using Hough TransformDr. Dnyaneshwar KirangeNo ratings yet
- Curve Path Detection in Autonomous Vehicle Using Deep LearningDocument7 pagesCurve Path Detection in Autonomous Vehicle Using Deep LearningJOSECARLOS RAMIREZ BREÑANo ratings yet
- Rekshma Seminar ReportDocument37 pagesRekshma Seminar Reportrahulraj rNo ratings yet
- Rfid Based Vehicle Tracking System Circuit DiagramDocument4 pagesRfid Based Vehicle Tracking System Circuit DiagramAkhilaNo ratings yet
- Net Work Survey VehicleDocument26 pagesNet Work Survey VehiclegurvinderkumarNo ratings yet
- Digital Image Processing 2 PresentationDocument18 pagesDigital Image Processing 2 PresentationNaveen KumarNo ratings yet
- Avoiding Forward Car Collision Using Stereo Vision SystemDocument4 pagesAvoiding Forward Car Collision Using Stereo Vision SystemAsil AsilaNo ratings yet
- Shi Final ReportDocument12 pagesShi Final ReportMohamed SaeedNo ratings yet
- Second Generation Multi Purpose Camera (MPC2) : Chassis Systems ControlDocument4 pagesSecond Generation Multi Purpose Camera (MPC2) : Chassis Systems ControlKevin TanNo ratings yet
- Traffic Monitoring Using Multiple Cameras, Homographies and Multi-Hypothesis TrackingDocument4 pagesTraffic Monitoring Using Multiple Cameras, Homographies and Multi-Hypothesis TrackingImam FathurNo ratings yet
- Traffic Sign Recognition and ClassificationDocument6 pagesTraffic Sign Recognition and ClassificationmisganawgetahunNo ratings yet
- Self-Driving Car Technologies & ChallengesDocument22 pagesSelf-Driving Car Technologies & ChallengesCrowned QueenNo ratings yet
- A Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentDocument3 pagesA Survey On Unmanned Vehicles Techniques For Terrain Detection in 3D EnvironmentInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- A Review of Automatic License Plate Recognition System in Mobile-Based PlatformDocument6 pagesA Review of Automatic License Plate Recognition System in Mobile-Based PlatformadiaNo ratings yet
- Background Information: 2.1 Video ProcessingDocument4 pagesBackground Information: 2.1 Video ProcessingSanika DivekarNo ratings yet
- G J E S R: A Review On License Plate Recognition Based Anti Signal Detection SystemDocument7 pagesG J E S R: A Review On License Plate Recognition Based Anti Signal Detection SystemMuhd AmirulNo ratings yet
- HW Implementation of Real-Time Road - Lane Detection in FPGA-based Stereo CameraDocument4 pagesHW Implementation of Real-Time Road - Lane Detection in FPGA-based Stereo CameraLoi NgoNo ratings yet
- BS 5534-1Document85 pagesBS 5534-1Lynn Mail100% (2)
- Construction Procedure Manual: Material Transfer AdviceDocument1 pageConstruction Procedure Manual: Material Transfer AdviceLynn MailNo ratings yet
- Construction Procedure Manual: Project Progress Report LogDocument1 pageConstruction Procedure Manual: Project Progress Report LogLynn MailNo ratings yet
- Katalog Maccaferri TerrameshDocument14 pagesKatalog Maccaferri TerrameshLynn MailNo ratings yet
- Construction Procedure Manual: 1.0 Description of WorkDocument2 pagesConstruction Procedure Manual: 1.0 Description of WorkLynn MailNo ratings yet
- BS 3262-3Document11 pagesBS 3262-3Lynn MailNo ratings yet
- Work Method Statement: Soil Nailing, Guniting & Horizontal Drain Works (REV.01) Ahmad Zaki Sdn. BHDDocument22 pagesWork Method Statement: Soil Nailing, Guniting & Horizontal Drain Works (REV.01) Ahmad Zaki Sdn. BHDLynn Mail100% (1)
- Trans Resources Coorporation SDN BHD: Construction Method Statement Manual Soil Nails, Rock Bolts & GunitingDocument7 pagesTrans Resources Coorporation SDN BHD: Construction Method Statement Manual Soil Nails, Rock Bolts & GunitingLynn MailNo ratings yet
- BS 2782-8-Method 820A-1996 (1998) Methods of Testing Plastics. Other Properties. Determination of Water Vapour Transmission Rate (Dish Method) .Document17 pagesBS 2782-8-Method 820A-1996 (1998) Methods of Testing Plastics. Other Properties. Determination of Water Vapour Transmission Rate (Dish Method) .ironfaceNo ratings yet
- PENTENS CONC-CURE High Efficiency Concrete Curing CompoundDocument2 pagesPENTENS CONC-CURE High Efficiency Concrete Curing CompoundLynn MailNo ratings yet
- BS 1377-5Document41 pagesBS 1377-5Lynn MailNo ratings yet
- BS 10204 Metallic Products Inspection DocumentsDocument13 pagesBS 10204 Metallic Products Inspection DocumentsSetya BagusNo ratings yet
- BS 812-124Document29 pagesBS 812-124Lynn MailNo ratings yet
- Statement of Quality: Product: Tencate Polyfelt Ts50Document1 pageStatement of Quality: Product: Tencate Polyfelt Ts50Lynn MailNo ratings yet
- Brochure Dwsub 9.2021Document2 pagesBrochure Dwsub 9.2021Lynn MailNo ratings yet
- Brochure SWP 8.2021Document2 pagesBrochure SWP 8.2021Lynn MailNo ratings yet
- Supercast PVC WaterstopDocument8 pagesSupercast PVC WaterstopMardhika AdhiNo ratings yet
- Tencate Solutions For InfrastructureDocument8 pagesTencate Solutions For InfrastructureDukiyo SuperNo ratings yet
- Sieve AnalysisDocument1 pageSieve AnalysisLynn MailNo ratings yet
- Safety Data Sheet Concure P: Revision Date: 05/03/2019 Revision: 5 Supersedes Date: 15/11/2015Document6 pagesSafety Data Sheet Concure P: Revision Date: 05/03/2019 Revision: 5 Supersedes Date: 15/11/2015Lynn MailNo ratings yet
- Procedure For Soil Nailing Works Preparation of SurfaceDocument2 pagesProcedure For Soil Nailing Works Preparation of SurfaceLynn MailNo ratings yet
- ITP Edisi Tahun 2020 PDFDocument276 pagesITP Edisi Tahun 2020 PDFNurul Syafiqah Ghazali67% (3)
- Method Statement Reticulation PipeDocument5 pagesMethod Statement Reticulation PipeTaqiuddinHarithNo ratings yet
- Method Statement ClearingDocument5 pagesMethod Statement Clearingqoci5koNo ratings yet
- Asphalt Road Reinforcement - Maccaferri MalaysiaDocument3 pagesAsphalt Road Reinforcement - Maccaferri MalaysiaLynn MailNo ratings yet
- MS Road KerbDocument6 pagesMS Road KerbHazwan Nasir100% (3)
- Work Method Statement FOR Pressure GroutingDocument2 pagesWork Method Statement FOR Pressure GroutingLynn MailNo ratings yet
- Work Method Statement FOR Determine The Invert Level of Existing PondDocument1 pageWork Method Statement FOR Determine The Invert Level of Existing PondLynn MailNo ratings yet
- Polymer Modified Structural Repair Mortar Work MethodDocument2 pagesPolymer Modified Structural Repair Mortar Work MethodLynn MailNo ratings yet
- Taller de Calor EstDocument2 pagesTaller de Calor EstDiegoMuñozNo ratings yet
- Chem 136-LAB ADocument3 pagesChem 136-LAB Asidro12388% (8)
- Tubo Optiflux 2000 - Manual PDFDocument48 pagesTubo Optiflux 2000 - Manual PDFRonaldo Damasceno EmerichNo ratings yet
- Pokemon Heart GoldDocument8 pagesPokemon Heart GoldPainToTheWorldNo ratings yet
- Aronne Armanini (Auth.) - Principles of River Hydraulics-Springer International Publishing (2018)Document230 pagesAronne Armanini (Auth.) - Principles of River Hydraulics-Springer International Publishing (2018)Matija LozicNo ratings yet
- Project Lakaw: Arduino-base Assisted Stick for Visually Impaired PeopleDocument13 pagesProject Lakaw: Arduino-base Assisted Stick for Visually Impaired PeopleEarl MathewNo ratings yet
- ClientleDocument1 pageClientleRaghvendra ManiNo ratings yet
- Electrolytic CellDocument24 pagesElectrolytic CellIntani Mundiartasari100% (1)
- Master Drive 6RA70 Parameter ListDocument186 pagesMaster Drive 6RA70 Parameter Listsanjaya srivastava100% (3)
- HTTP Sleekfreak Ath CX 81 3wdev CD3WD METALWRK GTZ075CE B65 7 HTMDocument14 pagesHTTP Sleekfreak Ath CX 81 3wdev CD3WD METALWRK GTZ075CE B65 7 HTMPavan SripadaNo ratings yet
- Steel Code Check Theory EnuDocument341 pagesSteel Code Check Theory Enupopaciprian27No ratings yet
- Probability As A General Concept Can Be Defined As The Chance of An Event OccurDocument14 pagesProbability As A General Concept Can Be Defined As The Chance of An Event OccurMuhammad Adnan KhalidNo ratings yet
- Production of Pure Platinum and Palladium From DoreDocument4 pagesProduction of Pure Platinum and Palladium From DoreLựuLiềuLìNo ratings yet
- Signal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaDocument46 pagesSignal Sampling, Quantization, Binary Encoding: Oleh Albert SagalaRamos D HutabalianNo ratings yet
- B. Pharm.2nd 3rd 4th 2016-17Document8 pagesB. Pharm.2nd 3rd 4th 2016-17Mukesh TiwariNo ratings yet
- 1.master Techniques in Surgery - Esophageal Surgery, 1E (2014)Document456 pages1.master Techniques in Surgery - Esophageal Surgery, 1E (2014)Raul Micu ChisNo ratings yet
- 2500 Supreme IO&M ManualDocument36 pages2500 Supreme IO&M Manualadrianram1No ratings yet
- Analytical Reasoning Skills Part ADocument30 pagesAnalytical Reasoning Skills Part AAhmad MiftahulNo ratings yet
- I See Fire ChordsDocument4 pagesI See Fire ChordsIm In TroubleNo ratings yet
- Olympian G60F1 G75F1 Spec SheetDocument6 pagesOlympian G60F1 G75F1 Spec Sheetkman548No ratings yet
- Swiss ReDocument9 pagesSwiss ReTuxedo1982No ratings yet
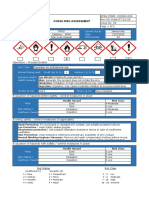
- Cossh Risk Assessment: Carried Out By: Department: Date: Substance Name: CRA NumberDocument4 pagesCossh Risk Assessment: Carried Out By: Department: Date: Substance Name: CRA NumberRocky BisNo ratings yet
- PRACH Optimization - V1Document11 pagesPRACH Optimization - V1Tulipe Pivoine100% (5)
- Savannah Air Cargo ComplexDocument2 pagesSavannah Air Cargo Complexsavannahnow.comNo ratings yet
- La Villa Fact Sheet 2021-2022-UpdatedDocument4 pagesLa Villa Fact Sheet 2021-2022-Updatedsweta suresh ganvirNo ratings yet
- Reservoir SedimentationDocument20 pagesReservoir SedimentationKathlienNo ratings yet
- ACS Sainsbury and Asda Merger Leaner 82Document26 pagesACS Sainsbury and Asda Merger Leaner 82FlareGBANo ratings yet
- Plant Toxicology, Fourth Edition (Books in Soils, Plants, and The Environment) PDFDocument664 pagesPlant Toxicology, Fourth Edition (Books in Soils, Plants, and The Environment) PDFFahad JavedNo ratings yet
- Iberchem - French: Code Item Name Code Item Name 35000 7600Document2 pagesIberchem - French: Code Item Name Code Item Name 35000 7600Noor AshrafiNo ratings yet
- Bio Practical Specimen StudyDocument6 pagesBio Practical Specimen StudyShailjaNo ratings yet
- Piping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationFrom EverandPiping and Pipeline Calculations Manual: Construction, Design Fabrication and ExaminationRating: 4 out of 5 stars4/5 (18)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Functional Safety from Scratch: A Practical Guide to Process Industry ApplicationsFrom EverandFunctional Safety from Scratch: A Practical Guide to Process Industry ApplicationsNo ratings yet
- Guidelines for Siting and Layout of FacilitiesFrom EverandGuidelines for Siting and Layout of FacilitiesNo ratings yet
- An Introduction to the Periodic Table of Elements : Chemistry Textbook Grade 8 | Children's Chemistry BooksFrom EverandAn Introduction to the Periodic Table of Elements : Chemistry Textbook Grade 8 | Children's Chemistry BooksRating: 5 out of 5 stars5/5 (1)
- The Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookFrom EverandThe Periodic Table of Elements - Post-Transition Metals, Metalloids and Nonmetals | Children's Chemistry BookNo ratings yet
- Understanding Process Equipment for Operators and EngineersFrom EverandUnderstanding Process Equipment for Operators and EngineersRating: 4.5 out of 5 stars4.5/5 (3)
- Trevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationFrom EverandTrevor Kletz Compendium: His Process Safety Wisdom Updated for a New GenerationNo ratings yet
- Gas-Liquid And Liquid-Liquid SeparatorsFrom EverandGas-Liquid And Liquid-Liquid SeparatorsRating: 3.5 out of 5 stars3.5/5 (3)
- An Applied Guide to Water and Effluent Treatment Plant DesignFrom EverandAn Applied Guide to Water and Effluent Treatment Plant DesignRating: 5 out of 5 stars5/5 (4)
- Well Control for Completions and InterventionsFrom EverandWell Control for Completions and InterventionsRating: 4 out of 5 stars4/5 (10)
- Guidelines for Chemical Process Quantitative Risk AnalysisFrom EverandGuidelines for Chemical Process Quantitative Risk AnalysisRating: 5 out of 5 stars5/5 (1)
- Guidelines for Vapor Cloud Explosion, Pressure Vessel Burst, BLEVE, and Flash Fire HazardsFrom EverandGuidelines for Vapor Cloud Explosion, Pressure Vessel Burst, BLEVE, and Flash Fire HazardsNo ratings yet
- Conduct of Operations and Operational Discipline: For Improving Process Safety in IndustryFrom EverandConduct of Operations and Operational Discipline: For Improving Process Safety in IndustryRating: 5 out of 5 stars5/5 (1)
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Bow Ties in Risk Management: A Concept Book for Process SafetyFrom EverandBow Ties in Risk Management: A Concept Book for Process SafetyNo ratings yet
- Process Steam Systems: A Practical Guide for Operators, Maintainers, and DesignersFrom EverandProcess Steam Systems: A Practical Guide for Operators, Maintainers, and DesignersNo ratings yet
- Guidelines for Developing Quantitative Safety Risk CriteriaFrom EverandGuidelines for Developing Quantitative Safety Risk CriteriaNo ratings yet
- Perfume Engineering: Design, Performance and ClassificationFrom EverandPerfume Engineering: Design, Performance and ClassificationRating: 4 out of 5 stars4/5 (5)
- Guidelines for Engineering Design for Process SafetyFrom EverandGuidelines for Engineering Design for Process SafetyNo ratings yet
- Physical and Chemical Equilibrium for Chemical EngineersFrom EverandPhysical and Chemical Equilibrium for Chemical EngineersRating: 5 out of 5 stars5/5 (1)
- Major Accidents to the Environment: A Practical Guide to the Seveso II-Directive and COMAH RegulationsFrom EverandMajor Accidents to the Environment: A Practical Guide to the Seveso II-Directive and COMAH RegulationsNo ratings yet