You might also like
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- W1-2 Gaussian and Gauss Jordan AlgorithmDocument33 pagesW1-2 Gaussian and Gauss Jordan AlgorithmEmanuel JheadNo ratings yet
- Section 7.4 MADocument39 pagesSection 7.4 MAvinothNo ratings yet
- Chapter 1 Topic 1 - Gaussian Elimination Method (Matrices)Document34 pagesChapter 1 Topic 1 - Gaussian Elimination Method (Matrices)Joan SilvaNo ratings yet
- Systems of Linear EquationsDocument24 pagesSystems of Linear EquationsEli LoneyNo ratings yet
- SystemsofEquations HandoutDocument44 pagesSystemsofEquations Handoutasdasdf1No ratings yet
- W1-1 Linear SystemsDocument26 pagesW1-1 Linear SystemsEmanuel JheadNo ratings yet
- Linear Algebra NotesDocument39 pagesLinear Algebra NotestglakasNo ratings yet
- Linear Algebra Linear Equation To GaussDocument41 pagesLinear Algebra Linear Equation To GaussKhemme Lapor Chu UbialNo ratings yet
- Linear Algebra Chapter 1 SolutionsDocument23 pagesLinear Algebra Chapter 1 SolutionsLê Vũ Anh NguyễnNo ratings yet
- Solving Linear SystemsDocument75 pagesSolving Linear Systemsnoli_ediNo ratings yet
- Solve Systems of Linear Equations Using Matrix MethodsDocument24 pagesSolve Systems of Linear Equations Using Matrix MethodsEugene BusicoNo ratings yet
- Engineering MathematicsDocument74 pagesEngineering MathematicsAhmadMoaazNo ratings yet
- Systems of Linear Equations and MatricesDocument49 pagesSystems of Linear Equations and Matricesgosaye desalegnNo ratings yet
- 1 MATH 129 - Chapter One: Systems of Linear EquationsDocument21 pages1 MATH 129 - Chapter One: Systems of Linear EquationsBlaziyNo ratings yet
- L1 System-PrintDocument17 pagesL1 System-PrintkkkNo ratings yet
- Linear AlgebraDocument148 pagesLinear AlgebraTibyanNo ratings yet
- Chapter 5 SlidesDocument112 pagesChapter 5 SlidesSingh KaranNo ratings yet
- Gaussian EliminationDocument13 pagesGaussian EliminationReyes VoksNo ratings yet
- Solve Linear SystemsDocument10 pagesSolve Linear SystemsAllen Kyle PrielaNo ratings yet
- 8 3 Gauss ElimDocument11 pages8 3 Gauss ElimajayNo ratings yet
- CH 11 PowerpointDocument62 pagesCH 11 PowerpointRolando QuintanaNo ratings yet
- Antonchap1 LinsystemsDocument23 pagesAntonchap1 Linsystemsapi-2612829520% (1)
- Equation MatrixDocument24 pagesEquation MatrixShubham YadavNo ratings yet
- Hefferon LinsystemsDocument28 pagesHefferon Linsystemsapi-261282952No ratings yet
- Math 24-Linear Algebra (Soft Copy) Set BDocument5 pagesMath 24-Linear Algebra (Soft Copy) Set BArgie ClaroNo ratings yet
- Algeb Midterm-FinalDocument71 pagesAlgeb Midterm-FinalGreen zolarNo ratings yet
- Equations of Lines and Systems of Linear EquationsDocument36 pagesEquations of Lines and Systems of Linear EquationsG19 Sauro Denise AngelaNo ratings yet
- Linear Algebra Lesson 1Document16 pagesLinear Algebra Lesson 1Mab ShiNo ratings yet
- m40 s12 Lecture4Document3 pagesm40 s12 Lecture4ammar_harbNo ratings yet
- Systems of Equations: SPI 3102.3.9 Solve Systems of Linear Equation/inequalities in Two VariablesDocument25 pagesSystems of Equations: SPI 3102.3.9 Solve Systems of Linear Equation/inequalities in Two VariablesIbrahim AyoubNo ratings yet
- Gaussian Elimination: Example 1: Solve This SystemDocument41 pagesGaussian Elimination: Example 1: Solve This SystemNyajena MurozviNo ratings yet
- Week 2 Linear Independent and BasesDocument50 pagesWeek 2 Linear Independent and Basesr.xiovarielexco21No ratings yet
- Gaussian Elimination-2 PDFDocument20 pagesGaussian Elimination-2 PDFSupr RayNo ratings yet
- Systems of Linear Equations WorkbookDocument41 pagesSystems of Linear Equations WorkbookJay-Jay JapsNo ratings yet
- Elementary Linear Algebra SolutionsDocument20 pagesElementary Linear Algebra SolutionsArviena JasmineNo ratings yet
- Example 1.1.1 (Solving Linear Equations)Document16 pagesExample 1.1.1 (Solving Linear Equations)Happy King NguyenNo ratings yet
- Module 1 System of Linear EquationDocument5 pagesModule 1 System of Linear EquationRtwpb Region IINo ratings yet
- Chapter 1Document69 pagesChapter 1AlifNRNo ratings yet
- m1 l1.2 - Linear SystemsDocument32 pagesm1 l1.2 - Linear SystemsHera ReinaNo ratings yet
- 3.6 Solving Systems of Linear Equations in Three VariablesDocument12 pages3.6 Solving Systems of Linear Equations in Three VariablesBorhan Nordin DaudNo ratings yet
- Linear Equations - CDocument6 pagesLinear Equations - Cramlal18ramNo ratings yet
- Linear Systems: MATH 149 Linear Algebra With Computer ApplicationDocument53 pagesLinear Systems: MATH 149 Linear Algebra With Computer ApplicationMyca MoliNo ratings yet
- Algebra Course NotesDocument78 pagesAlgebra Course NotesMatthew RumleyNo ratings yet
- Day Assignment-Worth 10 Points, Due March 14: Can OneDocument19 pagesDay Assignment-Worth 10 Points, Due March 14: Can OneAlexander Kim WaingNo ratings yet
- PC Solve Linear SystemsDocument15 pagesPC Solve Linear SystemsHector R.100% (1)
- 7 2 Matrix MultiplicationDocument11 pages7 2 Matrix Multiplicationtarek moahmoud khalifaNo ratings yet
- Solving Systems of Linear EquationsDocument4 pagesSolving Systems of Linear EquationssamsonNo ratings yet
- CP - Gauss-Jordan Method 1Document4 pagesCP - Gauss-Jordan Method 1Govt.GraduateCollege TobaTekSinghNo ratings yet
- Solving Systems of Equations: MATH 15-1 Linear Algebra Week 2Document53 pagesSolving Systems of Equations: MATH 15-1 Linear Algebra Week 2DK DMNo ratings yet
- Gaussian Elimination and Gauss-Jordan Elimination Definition of MatrixDocument11 pagesGaussian Elimination and Gauss-Jordan Elimination Definition of MatrixManish GurungNo ratings yet
- 2) Solving - Linear - SystemsDocument19 pages2) Solving - Linear - SystemsSümeyyaNo ratings yet
- Math 202 Chapter 1Document12 pagesMath 202 Chapter 1JESSA ARETAÑONo ratings yet
- Solve Linear Systems Using Inverse MatricesDocument17 pagesSolve Linear Systems Using Inverse MatricesKhairul ArifNo ratings yet
- Math 8 Lesson 11 System of Linear EquationsDocument44 pagesMath 8 Lesson 11 System of Linear EquationsAllah Rizza MarquesesNo ratings yet
- Solving a system of 3 linear equations to find unknown rentsDocument8 pagesSolving a system of 3 linear equations to find unknown rentsmech_lalit2k77856No ratings yet
- Week 1 – Lecture 1-3 FM101Document43 pagesWeek 1 – Lecture 1-3 FM101Labiba ZainNo ratings yet
- Systems - of - EquationsDocument39 pagesSystems - of - EquationsAnonymous 5aPb088W100% (1)
- Solving Linear Equations Using Gaussian & Gauss-Jordan ReductionDocument11 pagesSolving Linear Equations Using Gaussian & Gauss-Jordan ReductionSoha MakhyounNo ratings yet
- Linear Equation Dinesh KumarDocument20 pagesLinear Equation Dinesh KumarVibhu GoelNo ratings yet
- AIOUDocument2 pagesAIOUHoorabwaseemNo ratings yet
- Tuberculin Skin Test: Facilitator GuideDocument31 pagesTuberculin Skin Test: Facilitator GuideTiwi NaloleNo ratings yet
- DNA Affirmative - MSDI 2015Document146 pagesDNA Affirmative - MSDI 2015Michael TangNo ratings yet
- Polygenic InheritanceDocument13 pagesPolygenic InheritanceSandeep Kumar RaghuvanshiNo ratings yet
- Tirfor: Lifting and Pulling Machines With Unlimited Wire RopeDocument26 pagesTirfor: Lifting and Pulling Machines With Unlimited Wire RopeGreg ArabazNo ratings yet
- Guitar Chords:: Chorus: CF CF FCFC CFGC Verse: CF CF FCFC CFGCDocument17 pagesGuitar Chords:: Chorus: CF CF FCFC CFGC Verse: CF CF FCFC CFGCKhuanZumeNo ratings yet
- Emilio Aguinaldo CollegeDocument1 pageEmilio Aguinaldo CollegeRakeshKumar1987No ratings yet
- spl400 Stereo Power Amplifier ManualDocument4 pagesspl400 Stereo Power Amplifier ManualRichter SiegfriedNo ratings yet
- Hydrocarbon: Understanding HydrocarbonsDocument9 pagesHydrocarbon: Understanding HydrocarbonsBari ArouaNo ratings yet
- ProjectDocument86 pagesProjectrajuNo ratings yet
- More Than Moore: by M. Mitchell WaldropDocument4 pagesMore Than Moore: by M. Mitchell WaldropJuanjo ThepresisNo ratings yet
- The Interview: P F T IDocument14 pagesThe Interview: P F T IkkkkccccNo ratings yet
- Financial Accounting IFRS 3rd Edition Weygandt Solutions Manual 1Document8 pagesFinancial Accounting IFRS 3rd Edition Weygandt Solutions Manual 1jacob100% (34)
- Reference - Unit-V PDFDocument128 pagesReference - Unit-V PDFRamesh BalakrishnanNo ratings yet
- Project Report On AdidasDocument33 pagesProject Report On Adidassanyam73% (37)
- Hisar CFC - Approved DPRDocument126 pagesHisar CFC - Approved DPRSATYAM KUMARNo ratings yet
- Klein & Kulick Scandolous ActsDocument20 pagesKlein & Kulick Scandolous ActsClaudia Costa GarcíaNo ratings yet
- Dyna 2000 LiteDocument2 pagesDyna 2000 LiteRNKNo ratings yet
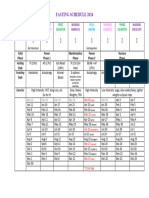
- Moon Fast Schedule 2024Document1 pageMoon Fast Schedule 2024mimiemendoza18No ratings yet
- Oas Community College: Republic of The Philippines Commission On Higher Education Oas, AlbayDocument22 pagesOas Community College: Republic of The Philippines Commission On Higher Education Oas, AlbayJaycel NepalNo ratings yet
- AWS Cloud Practicioner Exam Examples 0Document110 pagesAWS Cloud Practicioner Exam Examples 0AnataTumonglo100% (3)
- Oral Medication PharmacologyDocument4 pagesOral Medication PharmacologyElaisa Mae Delos SantosNo ratings yet
- Final - WPS PQR 86Document4 pagesFinal - WPS PQR 86Parag WadekarNo ratings yet
- KingmakerDocument5 pagesKingmakerIan P RiuttaNo ratings yet
- City MSJDocument50 pagesCity MSJHilary LedwellNo ratings yet
- Icelandic Spells and SigilsDocument16 pagesIcelandic Spells and SigilsSimonida Mona Vulić83% (6)
- QP P1 APR 2023Document16 pagesQP P1 APR 2023Gil legaspiNo ratings yet
- District Wise List of Colleges Under The Juridiction of MRSPTU BathindaDocument13 pagesDistrict Wise List of Colleges Under The Juridiction of MRSPTU BathindaGurpreet SandhuNo ratings yet
- Casestudy3 Hbo MaDocument2 pagesCasestudy3 Hbo Ma132345usdfghjNo ratings yet
- True False Survey FinalDocument2 pagesTrue False Survey Finalwayan_agustianaNo ratings yet