You might also like
- Fundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsFrom EverandFundamentals of Electronics 3: Discrete-time Signals and Systems, and Quantized Level SystemsNo ratings yet
- Lect 1Document30 pagesLect 1Sameh MostafaNo ratings yet
- L5 To 7 Transient and Steady State ResponseDocument53 pagesL5 To 7 Transient and Steady State ResponseRaj PatelNo ratings yet
- Exp2 Time ResponseDocument3 pagesExp2 Time Responsegangam aashrithNo ratings yet
- Transient & Steady State Response AnalysisDocument46 pagesTransient & Steady State Response AnalysisSwati AgarwalNo ratings yet
- Experiment 01: Aim of The ExperimentDocument11 pagesExperiment 01: Aim of The ExperimentSomnath BiswalNo ratings yet
- Time Response of Second Order Systems - GATE Study Material in PDFDocument5 pagesTime Response of Second Order Systems - GATE Study Material in PDFAtul ChoudharyNo ratings yet
- Experiment 01: Aim of The ExperimentDocument11 pagesExperiment 01: Aim of The ExperimentSomnath BiswalNo ratings yet
- Experiment No: 3 Design and Evaluation of Second Order SystemDocument6 pagesExperiment No: 3 Design and Evaluation of Second Order SystemBorse RajNo ratings yet
- Test Signals R (T) A T: N 0 N 1 N 2 R(S) 2a/s R(S) A/s R(S) A/sDocument53 pagesTest Signals R (T) A T: N 0 N 1 N 2 R(S) 2a/s R(S) A/s R(S) A/sAjay Kumar RNo ratings yet
- G S D(S) N S D S N S D S: EC5: Control SystemsDocument7 pagesG S D(S) N S D S N S D S: EC5: Control SystemsMANOJ KUMAR DASNo ratings yet
- Week 5 PDFDocument82 pagesWeek 5 PDFArnab RoyNo ratings yet
- Experiment No: 2 Determine The Step Response of First Order and Second Order System and Obtain Their Transfer FunctionDocument11 pagesExperiment No: 2 Determine The Step Response of First Order and Second Order System and Obtain Their Transfer FunctionYAKALA RAVIKUMARNo ratings yet
- Control Systems U2 (TEL306)Document80 pagesControl Systems U2 (TEL306)Ruvenderan SuburamaniamNo ratings yet
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessDocument13 pagesUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaNo ratings yet
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Document5 pagesModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- Time Domain Analysis of Control SystemDocument25 pagesTime Domain Analysis of Control SystemEti'el Films / ኢትኤል ፊልሞችNo ratings yet
- Control System - Exprmnt 8Document2 pagesControl System - Exprmnt 8VarunNo ratings yet
- Control Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectDocument157 pagesControl Systems Unit-2 Time Response Analysis: Ms. P. Geethanjali Asst. Professor (SR) SelectVijay IndukuriNo ratings yet
- 6 Lecture Notes-6 BEM2053 EM218 - Additional NotesDocument20 pages6 Lecture Notes-6 BEM2053 EM218 - Additional NotesMuhammad Abdullah ImranNo ratings yet
- Contoh REPORT Open Ended CONTROLDocument32 pagesContoh REPORT Open Ended CONTROLtiko lolipopNo ratings yet
- Experiment 1Document5 pagesExperiment 1HarshaPuttaguntaNo ratings yet
- QUBE-Servo 2 - Second Order Systems Workbook (Student)Document6 pagesQUBE-Servo 2 - Second Order Systems Workbook (Student)daanish petkarNo ratings yet
- Step Response of First Order System Expt ChE Lab 2Document5 pagesStep Response of First Order System Expt ChE Lab 2simonatics08No ratings yet
- Lesson 5 - System ResponseDocument37 pagesLesson 5 - System Responsepontshobridgett16No ratings yet
- S Announcement 15622Document22 pagesS Announcement 15622Nicole Anne BorromeoNo ratings yet
- Time Response of 2nd Order SystemDocument4 pagesTime Response of 2nd Order SystemsNo ratings yet
- 1 Transient (Step) Response Specifications For Underdamped Second Order SystemsDocument6 pages1 Transient (Step) Response Specifications For Underdamped Second Order Systemsمحيي الدين الكميشىNo ratings yet
- Time Respons: Dasar Sistem KontrolDocument15 pagesTime Respons: Dasar Sistem KontrolitmyNo ratings yet
- 08-05-2021-CS - Time Response AnalysisDocument14 pages08-05-2021-CS - Time Response AnalysisKowstubha ChNo ratings yet
- Time Response of 2nd Order SystemDocument4 pagesTime Response of 2nd Order SystemsNo ratings yet
- Transient Response SpecificationsDocument27 pagesTransient Response SpecificationsDean WinchesterNo ratings yet
- Precision Measurement & Control RevisionDocument8 pagesPrecision Measurement & Control RevisionEleanor McCutcheonNo ratings yet
- Ae Lab ManualDocument52 pagesAe Lab ManualaryakalekattuNo ratings yet
- Lecture 6Document5 pagesLecture 6Abdullah Mohammed AlsaadouniNo ratings yet
- Lecture-5 Performance of Feedback Control SystemsDocument101 pagesLecture-5 Performance of Feedback Control SystemsHeba FarhatNo ratings yet
- Time Domain Analysis of Control SystemDocument49 pagesTime Domain Analysis of Control Systemanasmos danielNo ratings yet
- Control Systems (EC 205, 3L + 1T)Document25 pagesControl Systems (EC 205, 3L + 1T)Abhishek RaiNo ratings yet
- B - Lecture6 Time-Domain Specifications Automatic Control SystemDocument18 pagesB - Lecture6 Time-Domain Specifications Automatic Control SystemAbaziz Mousa OutlawZzNo ratings yet
- MTX Unit 4Document21 pagesMTX Unit 4Chetan HoleNo ratings yet
- Lecture-9 Time Domain Analysis of 1st Order SystemsDocument27 pagesLecture-9 Time Domain Analysis of 1st Order Systemsusama asifNo ratings yet
- 4 Review Response Arbitrary ExcitationDocument17 pages4 Review Response Arbitrary ExcitationTanay ChoudharyNo ratings yet
- CTRL 4 RevDocument19 pagesCTRL 4 RevsibasissenguptaNo ratings yet
- Time Response Analysis of SystemDocument2 pagesTime Response Analysis of SystemJames Lee IlaganNo ratings yet
- Chapter 3A SlidesDocument26 pagesChapter 3A Slidesيوسف الأحمديNo ratings yet
- Hidden Markov Models: Adapted FromDocument27 pagesHidden Markov Models: Adapted FromAkash Singh BadalNo ratings yet
- Control System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKDocument18 pagesControl System Toolbox (Part-II) : Imtiaz - Hussain@faculty - Muet.edu - PKKiranKumarNo ratings yet
- Time Response AnalysisDocument37 pagesTime Response Analysis7014KANISHKA JAISWALNo ratings yet
- Control PrinciplesDocument91 pagesControl PrinciplesMayank KumarNo ratings yet
- Second Order SystemsDocument30 pagesSecond Order SystemsMansi NanavatiNo ratings yet
- Cleveland State University Mechanical Engineering Hanz Richter, PHDDocument9 pagesCleveland State University Mechanical Engineering Hanz Richter, PHDمحيي الدين الكميشىNo ratings yet
- Cleveland State University Mechanical Engineering Hanz Richter, PHDDocument9 pagesCleveland State University Mechanical Engineering Hanz Richter, PHDمحيي الدين الكميشىNo ratings yet
- Dynamic Characteristics of Measuring SystemsDocument102 pagesDynamic Characteristics of Measuring Systemssunil48175% (4)
- UWE Bristol: Lecture 4: Second Order Time Response and The Block Diagram ApproachDocument26 pagesUWE Bristol: Lecture 4: Second Order Time Response and The Block Diagram ApproachYahya NaeemNo ratings yet
- Lecture6 PDFDocument8 pagesLecture6 PDFEdutamNo ratings yet
- Mechatronics Frequency Response Analysis & Design K. Craig 1Document121 pagesMechatronics Frequency Response Analysis & Design K. Craig 1rub786No ratings yet
- MatLab AssignmentDocument10 pagesMatLab AssignmentTher Htet AungNo ratings yet
- Time Domain Analysis of Control Systems: Vikas D. HajareDocument65 pagesTime Domain Analysis of Control Systems: Vikas D. HajareVikas HajareNo ratings yet
- T. Murugan: Post Applied For Well Testing OperatorDocument5 pagesT. Murugan: Post Applied For Well Testing Operatorjohn MNo ratings yet
- SOM-based Generating of Association RulesDocument5 pagesSOM-based Generating of Association RulesKishor PeddiNo ratings yet
- Artuz Albert PDFDocument4 pagesArtuz Albert PDFJasmin Kate DatuinNo ratings yet
- 3393 - Supervision of Concrete Construction Volume 2Document271 pages3393 - Supervision of Concrete Construction Volume 2Oum ChhayNoy100% (11)
- Cibse TM65 (2020)Document67 pagesCibse TM65 (2020)Reli Hano100% (1)
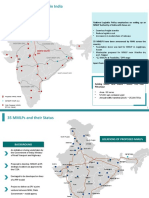
- Development of Mmlps in India: Western DFC Eastern DFCDocument2 pagesDevelopment of Mmlps in India: Western DFC Eastern DFCsdfg100% (2)
- Community Policing EssaysDocument7 pagesCommunity Policing Essaysgqdknjnbf100% (2)
- English 4 Q.2 Module 2Document6 pagesEnglish 4 Q.2 Module 2RjVValdezNo ratings yet
- Topic: Choppers: Presented By: Er. Ram Singh (Asstt. Prof.) Deptt. of EE BHSBIET LehragagaDocument89 pagesTopic: Choppers: Presented By: Er. Ram Singh (Asstt. Prof.) Deptt. of EE BHSBIET LehragagaJanmejaya MishraNo ratings yet
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 2Document6 pagesWind Tunnel Technique Notes For Aeronautical Engineers TP 2Ramji VeerappanNo ratings yet
- Fujikura FSM40S Service Manual PDFDocument67 pagesFujikura FSM40S Service Manual PDFAndrey Nikollas BuckoNo ratings yet
- 3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectDocument3 pages3 Tan 8.3 Tan108 Tan 8 - 1 3tan 8.3: Single Choice CorrectShehbaz ThakurNo ratings yet
- TGA Interpretation of Data, Sources of ErrorDocument28 pagesTGA Interpretation of Data, Sources of ErrorUsman GhaniNo ratings yet
- Etrade Bank-StatementDocument5 pagesEtrade Bank-StatementMark Galanty100% (4)
- Financial Accounting Report (Partnership - Group 2)Document20 pagesFinancial Accounting Report (Partnership - Group 2)syednaim0300No ratings yet
- Winsome Hin-Shin LEE CV (Feb 2017)Document5 pagesWinsome Hin-Shin LEE CV (Feb 2017)Winsome LeeNo ratings yet
- Dive Scubapro - Air2 3rd - Maintenance ProcedureDocument5 pagesDive Scubapro - Air2 3rd - Maintenance Proceduremanonpom100% (1)
- Dubai Holding FactsheetDocument2 pagesDubai Holding FactsheetHarley soulNo ratings yet
- Synchronous Motor AC DrivesDocument40 pagesSynchronous Motor AC DrivesHarshal Thakur100% (1)
- Reading TAF'sDocument4 pagesReading TAF'sDouglas AlvarezNo ratings yet
- TA-Modulator EN LowDocument16 pagesTA-Modulator EN Lowkap4enijNo ratings yet
- Refinery Workbook ExerciseDocument54 pagesRefinery Workbook ExerciseHarshit SharmaNo ratings yet
- Engineers House Fire Fighting Course FP 01Document54 pagesEngineers House Fire Fighting Course FP 01Muhammad ElbarbaryNo ratings yet
- h2s Naoh Equilibrium CurveDocument22 pagesh2s Naoh Equilibrium Curvesmartleo_waloNo ratings yet
- MOEMS 2020 Questions Paper Division EDocument20 pagesMOEMS 2020 Questions Paper Division EHarleenaDivs50% (4)
- Open National Abacus Competition 2021 - Maats PVT LTDDocument8 pagesOpen National Abacus Competition 2021 - Maats PVT LTDRanjana GalphadeNo ratings yet
- Komatsu Wheel Loaders Wa250pz 5 Shop ManualDocument20 pagesKomatsu Wheel Loaders Wa250pz 5 Shop Manualmarcia100% (48)
- Uenr0997 12 00 - Manuals Service Modules - Testing & AdjustingDocument90 pagesUenr0997 12 00 - Manuals Service Modules - Testing & Adjustingmostafa aliNo ratings yet
- Ubd Template DiltzDocument6 pagesUbd Template Diltzapi-281020585No ratings yet
- The Child's Learning of English Morphology: WORDDocument29 pagesThe Child's Learning of English Morphology: WORDCatnis TomNo ratings yet