You might also like
- System Analysis: Itce470: Control Sysytem Experiment No. 3Document7 pagesSystem Analysis: Itce470: Control Sysytem Experiment No. 3HALIMANo ratings yet
- RME30002 - Control and Automation Lab Report 3 Lab Group - 1Document11 pagesRME30002 - Control and Automation Lab Report 3 Lab Group - 1ManashaaNo ratings yet
- A Simple Method For Estimation of Parameters in First Order SystemsDocument13 pagesA Simple Method For Estimation of Parameters in First Order Systemskeyboard2014No ratings yet
- Lecture 05 Time Domain Performance PDocument47 pagesLecture 05 Time Domain Performance Pcesar ruizNo ratings yet
- Lecture 6 2nd Order System Time ResponseDocument81 pagesLecture 6 2nd Order System Time ResponseFahad ChaudharyNo ratings yet
- Module 3Document42 pagesModule 3VARUN B MNo ratings yet
- CS LabReport 3Document10 pagesCS LabReport 3Muhammad AfzaalNo ratings yet
- Lab Experiment 2: Performance of First and Second Order SystemsDocument12 pagesLab Experiment 2: Performance of First and Second Order SystemsAhmed AlhadarNo ratings yet
- Digital Signal Processing Lab Manual: Iii B.Tech I SemDocument50 pagesDigital Signal Processing Lab Manual: Iii B.Tech I Sem19501A0459 MAKANA PRASANNA LAKSHMINo ratings yet
- 7 - 1 - Empirical Model PDFDocument16 pages7 - 1 - Empirical Model PDFAnanda CahyaNo ratings yet
- Program CodingDocument3 pagesProgram Codings.reeganNo ratings yet
- M9 Time ResponseDocument21 pagesM9 Time ResponseKhaled AlshurmanNo ratings yet
- LEC14-E1236-control 1Document20 pagesLEC14-E1236-control 1MandolinNo ratings yet
- 2nd Order Performance 6Document4 pages2nd Order Performance 6waqar_malikNo ratings yet
- First Systems Tcm18 190087Document5 pagesFirst Systems Tcm18 190087HyeSooNo ratings yet
- Assignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsDocument6 pagesAssignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsSyed AfzalNo ratings yet
- LAB 1-Effect of Controller GainDocument8 pagesLAB 1-Effect of Controller GainNur FadilahNo ratings yet
- Lab # 6 Time Response AnalysisDocument10 pagesLab # 6 Time Response AnalysisFahad AneebNo ratings yet
- Lti - 51Document3 pagesLti - 51s.reeganNo ratings yet
- 5_PID (1)Document6 pages5_PID (1)KADUSKAR PALASHNo ratings yet
- Research Ideas and ConceptsDocument27 pagesResearch Ideas and ConceptsAyush RanjanNo ratings yet
- AMRITA VISHWA VIDYAPEETAM CONTROL SYSTEMS LAB RECORD EXPERIMENT 1 IMPROVE TRANSIENT RESPONSEDocument48 pagesAMRITA VISHWA VIDYAPEETAM CONTROL SYSTEMS LAB RECORD EXPERIMENT 1 IMPROVE TRANSIENT RESPONSESanthoshi AkkisettiNo ratings yet
- Lecture - 4 - Understanding of First & Second Order Systems-V3Document31 pagesLecture - 4 - Understanding of First & Second Order Systems-V3cesar ruizNo ratings yet
- Assignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsDocument6 pagesAssignment 03: 1 Explain Unit Step Response of First Order Linear Time Invariant SystemsSyed AfzalNo ratings yet
- Module 4: Time Response of Discrete Time Systems: Lecture Note 1Document5 pagesModule 4: Time Response of Discrete Time Systems: Lecture Note 1nirmal_inbox100% (1)
- Lab 3Document3 pagesLab 3HiNo ratings yet
- Designing Two-Position Controllers for Pole PlacementDocument28 pagesDesigning Two-Position Controllers for Pole PlacementKhethanNo ratings yet
- Bkf3791 Pci Lab - Group 2 - Experiment 4Document21 pagesBkf3791 Pci Lab - Group 2 - Experiment 4Lee Jian RongNo ratings yet
- PID ControllerDocument17 pagesPID Controllermothaffar ahmad100% (1)
- Addis Ababa Science & Technology University: College of Electrical & Mechanical EngineeringDocument91 pagesAddis Ababa Science & Technology University: College of Electrical & Mechanical Engineeringliyou eshetuNo ratings yet
- Chapter 10 PID 1Document36 pagesChapter 10 PID 1Taufiq GalangNo ratings yet
- Niemann 2014 J. Phys. Conf. Ser. 570 012001Document13 pagesNiemann 2014 J. Phys. Conf. Ser. 570 012001Sa Sa OsNo ratings yet
- Matlab Simulation of First and Second Order Systems PerformanceDocument6 pagesMatlab Simulation of First and Second Order Systems PerformanceAbdul Rehman AfzalNo ratings yet
- The Design of Feedback Control SystemsDocument36 pagesThe Design of Feedback Control SystemsNirmal Kumar PandeyNo ratings yet
- ENG2016M Introduction To Control: Transient Response & Steady State ErrorDocument59 pagesENG2016M Introduction To Control: Transient Response & Steady State ErrorSwifty SpotNo ratings yet
- Exp4-Result & DiscussionDocument23 pagesExp4-Result & DiscussionKelvin Wong Jing ZhiNo ratings yet
- Experiment 01: Aim of The ExperimentDocument11 pagesExperiment 01: Aim of The ExperimentSomnath BiswalNo ratings yet
- UGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessDocument13 pagesUGRD-EE6301-Feedback-and-Control-Systems-Overall-Midterm QuizessJitlee PapaNo ratings yet
- Lab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer SpeedDocument11 pagesLab11b - SERVO TRAINER 4 Proportional Plus Integral Control of Servo Trainer Speedsairafi100% (3)
- Department of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokDocument11 pagesDepartment of Petrochemical Engineering College of Technical Engineering University of Polytechnic-DuhokWalid AdnanNo ratings yet
- Experiment 01: Aim of The ExperimentDocument11 pagesExperiment 01: Aim of The ExperimentSomnath BiswalNo ratings yet
- Group 4 - Section 03 - Experiment 4Document22 pagesGroup 4 - Section 03 - Experiment 4PRITHASHNI LETCHUMANANNo ratings yet
- CSL05Document6 pagesCSL05Mahnoor KhanNo ratings yet
- Lab #6 - Second Order Systems Rev 1Document5 pagesLab #6 - Second Order Systems Rev 1ahmed shahNo ratings yet
- Controls System Lab 4Document14 pagesControls System Lab 4Malik Muhammad Saim Raza Malik Murid HussainNo ratings yet
- Csa 1 6Document16 pagesCsa 1 6Denis SuezNo ratings yet
- Performance of FB SysDocument24 pagesPerformance of FB Sysomar hanyNo ratings yet
- Soft Computing 300Document7 pagesSoft Computing 300rohit SinghNo ratings yet
- Lab3 (4) 1Document3 pagesLab3 (4) 1ManashaaNo ratings yet
- Performance CriterionDocument28 pagesPerformance CriterionAbd Al Kareem AzoozNo ratings yet
- Control Exp 9 Student ManualDocument22 pagesControl Exp 9 Student ManualMohammad Bony IsrailNo ratings yet
- Experimental Data Data AnalysisDocument6 pagesExperimental Data Data AnalysiszakiNo ratings yet
- Time Response Experiment: Effects of Gain on Control SystemsDocument4 pagesTime Response Experiment: Effects of Gain on Control SystemsAkash AsifNo ratings yet
- Elearning - PID Controller FundamentalsDocument3 pagesElearning - PID Controller Fundamentalszarni77No ratings yet
- 19EC2208 Solution of Linear Constant Coefficient Difference EquationsDocument13 pages19EC2208 Solution of Linear Constant Coefficient Difference EquationsnagendraNo ratings yet
- University of Benghazi: Department of Electrical and Electronics EngineeringDocument12 pagesUniversity of Benghazi: Department of Electrical and Electronics EngineeringAhmed AlhadarNo ratings yet
- Sterling Test Prep College Physics Practice Questions: Vol. 1, High Yield College Physics Questions with Detailed ExplanationsFrom EverandSterling Test Prep College Physics Practice Questions: Vol. 1, High Yield College Physics Questions with Detailed ExplanationsNo ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- FMS T2-S2 AnswersDocument2 pagesFMS T2-S2 AnswersTher Htet AungNo ratings yet
- FMS T3-S2 AnswersDocument2 pagesFMS T3-S2 AnswersTher Htet AungNo ratings yet
- Mce - 42052 Fms Tutorial-Ii 3.9.2019 (Tue)Document2 pagesMce - 42052 Fms Tutorial-Ii 3.9.2019 (Tue)Ther Htet AungNo ratings yet
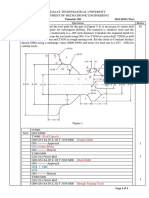
- MANDALAY TECHNOLOGICAL UNIVERSITY MECHATRONIC ENGINEERING TUTORIAL PROBLEMSDocument2 pagesMANDALAY TECHNOLOGICAL UNIVERSITY MECHATRONIC ENGINEERING TUTORIAL PROBLEMSTher Htet AungNo ratings yet
- FMS T1-S2 AnswersDocument6 pagesFMS T1-S2 AnswersTher Htet AungNo ratings yet
- MatLab AssignmentDocument13 pagesMatLab AssignmentTher Htet AungNo ratings yet
- MatLab AssignmentDocument12 pagesMatLab AssignmentTher Htet AungNo ratings yet
- MatLab AssignmentDocument13 pagesMatLab AssignmentTher Htet AungNo ratings yet
- MatLab AssignmentDocument9 pagesMatLab AssignmentTher Htet AungNo ratings yet
- What is NPSHDocument2 pagesWhat is NPSHJayNo ratings yet
- 2D Product Sheet 5 PExprt PDFDocument4 pages2D Product Sheet 5 PExprt PDFrafialanNo ratings yet
- Teknik Reaksi Kimia I: by HaryantoDocument23 pagesTeknik Reaksi Kimia I: by HaryantoHarymsl MslNo ratings yet
- Basics of Electronics and Microprocessor-201-300-Rohit NegiDocument16 pagesBasics of Electronics and Microprocessor-201-300-Rohit NegiRohit NegiNo ratings yet
- Sell An Element Project 2014Document4 pagesSell An Element Project 2014lauratruff6744No ratings yet
- Quantifiers Sentences PDFDocument10 pagesQuantifiers Sentences PDFNurjannah AnwarNo ratings yet
- Design and Manufacturing of Magnetic Climbing RobotDocument23 pagesDesign and Manufacturing of Magnetic Climbing RobotSushant VanveNo ratings yet
- Solar AngelDocument13 pagesSolar Angelaoauaz2000No ratings yet
- Effect of Rubber Tire On Behaviour of Subgrade Expansive Iraqi SoilsDocument14 pagesEffect of Rubber Tire On Behaviour of Subgrade Expansive Iraqi SoilshananNo ratings yet
- Magnetic Circuit: Induction Machine Class Instructor: DR - Fahad AlhuwaishelDocument25 pagesMagnetic Circuit: Induction Machine Class Instructor: DR - Fahad AlhuwaishelAhmed MohamedNo ratings yet
- Determine The Displacement of Point C and The Slope at Point B. EI Is Constant. UseDocument14 pagesDetermine The Displacement of Point C and The Slope at Point B. EI Is Constant. UseNikhil KumbharNo ratings yet
- Eddycurrentsensor PCB SENSOR 2010Document8 pagesEddycurrentsensor PCB SENSOR 2010Siphesihle NkosiNo ratings yet
- Catalogue Fans DrivesDocument60 pagesCatalogue Fans DrivesFernando MouraNo ratings yet
- UNIT 3 AeroelasticityDocument9 pagesUNIT 3 Aeroelasticitysri hari rajuNo ratings yet
- 04 - Jack - QA LINAC PDFDocument30 pages04 - Jack - QA LINAC PDFamirNo ratings yet
- ECE 468 Digital Image Processing Course OverviewDocument29 pagesECE 468 Digital Image Processing Course OverviewsarithaNo ratings yet
- Uniform Region of Self Aered FlowDocument15 pagesUniform Region of Self Aered FlowKarina GuadalupeNo ratings yet
- Multi SpindleDocument10 pagesMulti Spindlearunurs1No ratings yet
- p25 29 Tech Paper GE SEPT15 PDFDocument6 pagesp25 29 Tech Paper GE SEPT15 PDFTarek AbulailNo ratings yet
- CASTING PROCESS - HPDC PDFDocument14 pagesCASTING PROCESS - HPDC PDFetamil87No ratings yet
- Groundwater Terms & ConceptsDocument29 pagesGroundwater Terms & ConceptsAryono AdhiNo ratings yet
- CLS Aipmt 16 17 XII Phy Study Package 5 SET 1 Chapter 3Document28 pagesCLS Aipmt 16 17 XII Phy Study Package 5 SET 1 Chapter 3Kareena Gupta17% (6)
- Bonus Chapter A Physics PrimerDocument24 pagesBonus Chapter A Physics PrimerHimanshu KumarNo ratings yet
- SoapDocument40 pagesSoapUhjafwnuijhnfa KmerkgoeNo ratings yet
- Chemical Reaction Engineering Ii - Che471Document62 pagesChemical Reaction Engineering Ii - Che471EmmanuelNo ratings yet
- MS150025 02eDocument187 pagesMS150025 02eDhanraj Patil0% (1)
- Silicene: Michelle J.S. Spencer Tetsuya Morishita EditorsDocument283 pagesSilicene: Michelle J.S. Spencer Tetsuya Morishita EditorsPedro Vieira100% (1)
- Coherent De-Dispersion of Pulsar Data: Python ImplementationDocument30 pagesCoherent De-Dispersion of Pulsar Data: Python ImplementationAdithya ReddyNo ratings yet
- Gas Sweetening Process Design and CalculationsDocument9 pagesGas Sweetening Process Design and CalculationsFlorin Daniel AnghelNo ratings yet
- 2276 1Document2 pages2276 1hogoyoNo ratings yet