You might also like
- 1 Discrete-Time Markov ChainsDocument7 pages1 Discrete-Time Markov Chainssdilips19898170No ratings yet
- Unit 3Document113 pagesUnit 3Jai Sai RamNo ratings yet
- G/G/1 queue analysis and propertiesDocument7 pagesG/G/1 queue analysis and propertiesLars BorreNo ratings yet
- Transient random walk on a binary treeDocument6 pagesTransient random walk on a binary treeChristian OjedaNo ratings yet
- 1 Communication Classes and Irreducibility For Markov ChainsDocument8 pages1 Communication Classes and Irreducibility For Markov ChainsbobmezzNo ratings yet
- 4703 07 Notes MC PDFDocument7 pages4703 07 Notes MC PDFjpalacios806853No ratings yet
- MTL 733 Tutorial Sheet No. 1: Stochastic Processes and MartingalesDocument2 pagesMTL 733 Tutorial Sheet No. 1: Stochastic Processes and MartingalesJayantNo ratings yet
- CasarottoDocument7 pagesCasarottoDharmendra KumarNo ratings yet
- Lec 5Document3 pagesLec 5Atom CarbonNo ratings yet
- Exam FENE 2223 WithsolutionsDocument6 pagesExam FENE 2223 WithsolutionsLluís TorresNo ratings yet
- Markov Chains: 1.1 Specifying and Simulating A Markov ChainDocument38 pagesMarkov Chains: 1.1 Specifying and Simulating A Markov ChainRudi JuliantoNo ratings yet
- Tutorial Chapter 1 and 2 Memo-1Document13 pagesTutorial Chapter 1 and 2 Memo-1u20417242No ratings yet
- Tutorial 1Document3 pagesTutorial 1ayan.av0010No ratings yet
- ProbstatDocument16 pagesProbstatShreetama BhattacharyaNo ratings yet
- Notes MCIIDocument14 pagesNotes MCIIgeetharaman1699No ratings yet
- Expected Value Revisi2Document12 pagesExpected Value Revisi2FSR Uwu2419No ratings yet
- Ca07 RgIto TextDocument18 pagesCa07 RgIto TextTerwal Aandrés Oortiz VargasNo ratings yet
- On The Value Set of The Ramanujan FunctionDocument6 pagesOn The Value Set of The Ramanujan Functionapi-26401608No ratings yet
- Lecture 6: Markov ChainsDocument4 pagesLecture 6: Markov ChainsspitzersglareNo ratings yet
- FS Notes 1 PDFDocument16 pagesFS Notes 1 PDFArkadev GhoshNo ratings yet
- Engineering Differential Privacy BackgroundDocument4 pagesEngineering Differential Privacy BackgroundXZxzASNo ratings yet
- Math489/889 Stochastic Processes and Advanced Mathematical Finance Homework 7Document3 pagesMath489/889 Stochastic Processes and Advanced Mathematical Finance Homework 7poma7218No ratings yet
- Question Paper Code: X10663: ×2 20 Marks)Document3 pagesQuestion Paper Code: X10663: ×2 20 Marks)GOPINATH 189No ratings yet
- Partial Differential EquationsDocument18 pagesPartial Differential EquationsTridip SardarNo ratings yet
- MIT6 436JF18 Lec23Document9 pagesMIT6 436JF18 Lec23DevendraReddyPoreddyNo ratings yet
- Complex ProjectiveDocument10 pagesComplex ProjectiveAlejandro RomeroNo ratings yet
- LectureNotes39Nonlinear System.Document18 pagesLectureNotes39Nonlinear System.VinkbgkjgNo ratings yet
- Stochastic Processes BeamerDocument43 pagesStochastic Processes BeamerSheikh Mijanur RahamanNo ratings yet
- The Method of Multiple Scales for Linear Damped OscillatorDocument17 pagesThe Method of Multiple Scales for Linear Damped OscillatorokmoviesNo ratings yet
- Solving Differential EquationsDocument41 pagesSolving Differential EquationsMaraMarutzNo ratings yet
- SST 204 Courtesy of Michelle OwinoDocument63 pagesSST 204 Courtesy of Michelle OwinoplugwenuNo ratings yet
- Solutions For Problems in The 9 International Mathematics Competition For University StudentsDocument5 pagesSolutions For Problems in The 9 International Mathematics Competition For University StudentsMuhammad Al KahfiNo ratings yet
- Probability Formula SheetDocument11 pagesProbability Formula SheetJake RoosenbloomNo ratings yet
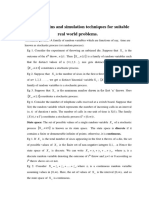
- Markov Chains and Simulation Techniques for Modeling Stochastic ProcessesDocument16 pagesMarkov Chains and Simulation Techniques for Modeling Stochastic ProcessesAngel Ammu100% (1)
- Random Process Characteristic Equation NOTESDocument147 pagesRandom Process Characteristic Equation NOTESAjay SinghNo ratings yet
- Generating Random VariablesDocument7 pagesGenerating Random VariablesTsvetanNo ratings yet
- Homework 5 SolutionsDocument9 pagesHomework 5 SolutionsAE ENo ratings yet
- Some Examples of Dynamical SystemsDocument4 pagesSome Examples of Dynamical SystemsLuiz RicardoNo ratings yet
- Discrete-time Markov Chains FoundationDocument59 pagesDiscrete-time Markov Chains FoundationIsabella AlvarengaNo ratings yet
- Compound Poisson Distribution Limit TheoremDocument6 pagesCompound Poisson Distribution Limit TheoremNamdevNo ratings yet
- Attractors of Ordinary Differential Equations: E. V. VoskresenskiiDocument14 pagesAttractors of Ordinary Differential Equations: E. V. VoskresenskiiAntonio Torres PeñaNo ratings yet
- ADASDDocument4 pagesADASDXZxzASNo ratings yet
- a, a, …, a, α, …, α a α a α a …+α a a, a, …, a a α a α a …+α a α …=αDocument7 pagesa, a, …, a, α, …, α a α a α a …+α a a, a, …, a a α a α a …+α a α …=αKimondo KingNo ratings yet
- Moment-Generating Functions 1. Demonstrate How The Moments of A Random Variable X May Be ObtainedDocument6 pagesMoment-Generating Functions 1. Demonstrate How The Moments of A Random Variable X May Be ObtaineddomNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Boundary Value Problems: Dr. Suresh Kumar, BITS PilaniDocument11 pagesBoundary Value Problems: Dr. Suresh Kumar, BITS PilaniRahul SharmaNo ratings yet
- Conditional Expectation and MartingalesDocument21 pagesConditional Expectation and MartingalesborjstalkerNo ratings yet
- Applied Stochastic ProcessesDocument2 pagesApplied Stochastic ProcessesAyush SekhariNo ratings yet
- Solving 2nd Order Linear Differential EquationsDocument11 pagesSolving 2nd Order Linear Differential EquationsDilham WahyudiNo ratings yet
- Fundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionDocument6 pagesFundamentals of Probability. 6.436/15.085: Markov Chains III. Periodicity, Mixing, AbsorptionSaurabh ShandilyaNo ratings yet
- Cadena de MarkovDocument20 pagesCadena de MarkovJaime PlataNo ratings yet
- Random Variables: Example 3ADocument4 pagesRandom Variables: Example 3AAlf ChingNo ratings yet
- Lapnt Probability ProjectsDocument20 pagesLapnt Probability ProjectsLê Quang ThảoNo ratings yet
- MA1254 Random Processes :: Unit 4 :: Classification of Random ProcessesDocument3 pagesMA1254 Random Processes :: Unit 4 :: Classification of Random Processesjeyaganesh100% (1)
- Chap MarkovDocument19 pagesChap MarkovSaumya LarokarNo ratings yet
- Lec 3Document2 pagesLec 3Atom CarbonNo ratings yet
- Tenta 21 AprilDocument4 pagesTenta 21 AprilFabian MolinaNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 4703 07 Notes PP NSPPDocument9 pages4703 07 Notes PP NSPPМилан МишићNo ratings yet
- Towards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010Document19 pagesTowards A Theory of Volatility Trading: Cambridge Books Online © Cambridge University Press, 2010bobmezzNo ratings yet
- ING Think Rates Spark Shifting GroundsDocument6 pagesING Think Rates Spark Shifting GroundsbobmezzNo ratings yet
- FX Talking: Some Stark DivergenceDocument15 pagesFX Talking: Some Stark DivergencebobmezzNo ratings yet
- The Convexity Maven: "Building A Better Volatility Mousetrap"Document13 pagesThe Convexity Maven: "Building A Better Volatility Mousetrap"bobmezzNo ratings yet
- 1 IEOR 4701: Continuous-Time Markov ChainsDocument22 pages1 IEOR 4701: Continuous-Time Markov ChainsbobmezzNo ratings yet
- c1Document68 pagesc1dey_zicoNo ratings yet
- Applied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014Document32 pagesApplied Probability: Nathana El Berestycki, University of Cambridge Part II, Lent 2014bobmezzNo ratings yet
- Siegel ParadoxDocument4 pagesSiegel ParadoxbobmezzNo ratings yet
- Learning from interest rate implied volatilitiesDocument85 pagesLearning from interest rate implied volatilitiesbobmezzNo ratings yet
- Pca Portfolio SelectionDocument18 pagesPca Portfolio Selectionluli_kbreraNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- A Tutorial On Principal Component AnalysisDocument12 pagesA Tutorial On Principal Component AnalysisCristóbal Alberto Campos MuñozNo ratings yet
- Statistical Properties of Forward Libor RatesDocument33 pagesStatistical Properties of Forward Libor RatesbobmezzNo ratings yet
- Derivatives Across Asset ClassesDocument59 pagesDerivatives Across Asset ClassesbobmezzNo ratings yet
- Elices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskDocument32 pagesElices - 2013 - Infoline - The Role of The Model Validation Function To Manage and Mitigate Model RiskbobmezzNo ratings yet
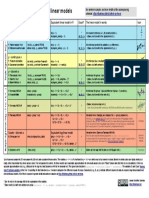
- Common Statistical Tests Are Linear ModelsDocument1 pageCommon Statistical Tests Are Linear ModelsbobmezzNo ratings yet
- Measuring cross-gamma riskDocument16 pagesMeasuring cross-gamma riskbobmezzNo ratings yet
- FX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?Document15 pagesFX Talking: Dovish Fed, Calm Seas - What Could Go Wrong?bobmezzNo ratings yet
- Market Volatility BulletinDocument28 pagesMarket Volatility BulletinbobmezzNo ratings yet
- Global Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmDocument23 pagesGlobal Markets Analyst - Top Ten Market Themes For 2021 - A Shot in The ArmbobmezzNo ratings yet
- Gatheral 1Document18 pagesGatheral 1Zhenhuan Song100% (1)
- GARCH Models in Python 1Document31 pagesGARCH Models in Python 1visNo ratings yet
- Global Cycle Notes Hope Springs EternalDocument27 pagesGlobal Cycle Notes Hope Springs EternalbobmezzNo ratings yet
- Rate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranoDocument94 pagesRate Curves For Forward Euribor Estimation and CSA-Discounting, AmetranosindhusrivastavaNo ratings yet
- GS Inflation Implementation 10-20Document20 pagesGS Inflation Implementation 10-20bobmezzNo ratings yet
- Berenberg Global ForecastsDocument15 pagesBerenberg Global ForecastsbobmezzNo ratings yet
- 21290f PDFDocument40 pages21290f PDFАндрій БілявськийNo ratings yet
- IIIT Sonepat Detailed Advertisement Assistant Professor Associate Professor FinalDocument6 pagesIIIT Sonepat Detailed Advertisement Assistant Professor Associate Professor FinalGv IIITNo ratings yet
- Vertical Turbine Pumps Engineering Data: Effective April 1, 2003Document11 pagesVertical Turbine Pumps Engineering Data: Effective April 1, 2003Israel CastilloNo ratings yet
- Study of IT Systems at Ashok LeylandDocument3 pagesStudy of IT Systems at Ashok LeylandSiddhant SalilNo ratings yet
- Chapter 3 - Overview of Manufacturing - UpdateDocument58 pagesChapter 3 - Overview of Manufacturing - Updatethinhtruong17092003No ratings yet
- Iso 19731-2017Document6 pagesIso 19731-2017Borja Arrizabalaga UriarteNo ratings yet
- SSIGL-2 Site Identification and Prioritization Ver-6Document106 pagesSSIGL-2 Site Identification and Prioritization Ver-6Amiira AbdumalikNo ratings yet
- Draft Nokia MSC O&M Daily and Weekly ProcessesDocument17 pagesDraft Nokia MSC O&M Daily and Weekly Processestest321yNo ratings yet
- Simplify and Automate Connectivity To AWS With Prisma SD-WANDocument4 pagesSimplify and Automate Connectivity To AWS With Prisma SD-WANAishwarya PradhanNo ratings yet
- Resume of Jhune Perez RTDocument2 pagesResume of Jhune Perez RTByahe Ni GeloNo ratings yet
- Arduino ReportDocument3 pagesArduino ReportarunNo ratings yet
- As Cfe Interop 61850 en PDFDocument29 pagesAs Cfe Interop 61850 en PDFlhuizxNo ratings yet
- Native Instruments Guitar Rig TutorialsDocument12 pagesNative Instruments Guitar Rig TutorialsEmre AlaçayırNo ratings yet
- Excel CheatsheetDocument1 pageExcel CheatsheetBoring BlandNo ratings yet
- Producing Cleaned-Up and In-Betweened DrawingsDocument10 pagesProducing Cleaned-Up and In-Betweened DrawingsErika C. Delos SantosNo ratings yet
- RatioandRegressionMethodofEstimation Lecture7 10Document30 pagesRatioandRegressionMethodofEstimation Lecture7 10mrpakistan444No ratings yet
- Lotus Notes Training ManualDocument64 pagesLotus Notes Training Manualiamprabir100% (1)
- Configurando CMC FACDocument14 pagesConfigurando CMC FACDante ChutorianscyNo ratings yet
- 8051 MaterialDocument198 pages8051 Materialsupreetp555No ratings yet
- Client Contract1Document4 pagesClient Contract1Jeysi MartinezNo ratings yet
- CC - B302mel3-Bwp05-C-Dwg-3013-01-A2-Code 2Document2 pagesCC - B302mel3-Bwp05-C-Dwg-3013-01-A2-Code 2vt9984No ratings yet
- 188524-01, DW502 DW504 La - EngDocument9 pages188524-01, DW502 DW504 La - EngCilvio LewlawskyjNo ratings yet
- User Manual: Digital-Control and Programmable DC Power SupplyDocument10 pagesUser Manual: Digital-Control and Programmable DC Power SupplyElib SekeeveNo ratings yet
- CATV NCII-CORE 4. Install Subscriber Drop Lines and CPEDocument50 pagesCATV NCII-CORE 4. Install Subscriber Drop Lines and CPECdscdb RegistrarNo ratings yet
- Vendor Selection and DevelopmentDocument11 pagesVendor Selection and DevelopmentAsher RamishNo ratings yet
- Definite Integrals and Trigonometric FunctionsDocument4 pagesDefinite Integrals and Trigonometric Functionskartikey papnoiNo ratings yet
- Zerust Flange Savers - WebDocument2 pagesZerust Flange Savers - WebFederico MoranNo ratings yet
- Rightpower SCFR1200 1200VA UPSDocument3 pagesRightpower SCFR1200 1200VA UPSWearn Jian LaiNo ratings yet
- Assessment of Customer Relationship Management On Central Hotel in The Case Hawassa CityDocument41 pagesAssessment of Customer Relationship Management On Central Hotel in The Case Hawassa Cityasu manNo ratings yet
- The Ultimate Guide To WaterjetDocument9 pagesThe Ultimate Guide To WaterjetNsidibe Michael EtimNo ratings yet