You might also like
- CBE 3310 Process Dynamics and Control PDFDocument8 pagesCBE 3310 Process Dynamics and Control PDFHeri RustamajiNo ratings yet
- ELEN90055 Control Systems: Credit Points: Level: Commencement Date & LocationDocument3 pagesELEN90055 Control Systems: Credit Points: Level: Commencement Date & LocationtefsgNo ratings yet
- Introduction To Instrumentation and ControlDocument4 pagesIntroduction To Instrumentation and Controlsouvik5000No ratings yet
- Assignment 1 - Closed Loop DynamicsDocument12 pagesAssignment 1 - Closed Loop DynamicsTharaka AmarasiriNo ratings yet
- Briefguidetrc3600 Mae3408 s2 2018Document3 pagesBriefguidetrc3600 Mae3408 s2 2018Dan DMNo ratings yet
- Digital Control Engineering: Analysis and DesignFrom EverandDigital Control Engineering: Analysis and DesignRating: 3 out of 5 stars3/5 (1)
- EIE412 - Lecture Modules & Contents (2021 - 22)Document18 pagesEIE412 - Lecture Modules & Contents (2021 - 22)sopuruNo ratings yet
- Unit - Guide - MECH302 - 2016 - S2 Day PDFDocument11 pagesUnit - Guide - MECH302 - 2016 - S2 Day PDFBrandeice BarrettNo ratings yet
- Control Engineering - Units of Study... - Swinburne University of Technology - Melbourne, AustraliaDocument4 pagesControl Engineering - Units of Study... - Swinburne University of Technology - Melbourne, AustraliaFaisal MohmandNo ratings yet
- EE 452 Digital Control SystemsDocument2 pagesEE 452 Digital Control SystemsFiaz KhanNo ratings yet
- Control Sensors Module Code 6EJ518Document15 pagesControl Sensors Module Code 6EJ518Umer EhsanNo ratings yet
- SYSC 3610 Biomedical Systems ModelingDocument4 pagesSYSC 3610 Biomedical Systems ModelingAshraf maghNo ratings yet
- Course Syllabus ELCT 331 - Control SystemsDocument2 pagesCourse Syllabus ELCT 331 - Control Systemsstephen villaruzNo ratings yet
- MET 415 104 - Automatic Control SystemsDocument8 pagesMET 415 104 - Automatic Control SystemsVergielyn MatusNo ratings yet
- Ee4004 Ee4004a Ee4004b SDF 2023Document2 pagesEe4004 Ee4004a Ee4004b SDF 2023funnylearn08No ratings yet
- Control Systems Course Outline FL16Document5 pagesControl Systems Course Outline FL16Mohamed KhairyNo ratings yet
- syllabus-ELG7113MCG5470 w2024Document4 pagessyllabus-ELG7113MCG5470 w2024Adil MajeedNo ratings yet
- ELE639 Course OutlineDocument8 pagesELE639 Course OutlineYann MichelNo ratings yet
- ME780A 2016 Fall OutlineDocument4 pagesME780A 2016 Fall OutlinetrebeheiramNo ratings yet
- Industrial Electronics SyllabusDocument4 pagesIndustrial Electronics SyllabusJackelyn Bautista100% (3)
- Course Outline: International Islamic University MalaysiaDocument5 pagesCourse Outline: International Islamic University MalaysiaOmar AbdiNo ratings yet
- Simulation FinalDocument94 pagesSimulation FinalDenisho DeeNo ratings yet
- Cce 405/cce 405 B/Bme 405: (Bio) Control Systems: American University of Science & TechnologyDocument6 pagesCce 405/cce 405 B/Bme 405: (Bio) Control Systems: American University of Science & TechnologyBernard MaacaronNo ratings yet
- EE4530 Power System Analysis and Control - OBTLDocument6 pagesEE4530 Power System Analysis and Control - OBTLAaron TanNo ratings yet
- MCE328 Dynamic SystemsDocument3 pagesMCE328 Dynamic SystemsAli Adnaan RazaNo ratings yet
- Course Syllabus: Instructor InformationDocument8 pagesCourse Syllabus: Instructor InformationGlicerio RufinoNo ratings yet
- Module 1 Notes - PSOC - MergedDocument27 pagesModule 1 Notes - PSOC - MergedK Lakshmi KNo ratings yet
- Control SystemDocument7 pagesControl SystemAbdul WaheedNo ratings yet
- Notes 15ME73 PDFDocument25 pagesNotes 15ME73 PDFmoosa midlaj100% (1)
- MAEG4050 Syllabus 2017-18Document4 pagesMAEG4050 Syllabus 2017-18horace LinNo ratings yet
- Elc 218Document4 pagesElc 218ghostreamNo ratings yet
- Course OutlineDocument4 pagesCourse Outlinegui0381No ratings yet
- PLC Questions LiiiDocument209 pagesPLC Questions LiiiSohaibNo ratings yet
- Course Outline - Info72200 101 - Systems Analysis and DesignDocument2 pagesCourse Outline - Info72200 101 - Systems Analysis and Designapi-382689726No ratings yet
- Mechanical Engineering Year 3Document21 pagesMechanical Engineering Year 3Kashif MushtaqNo ratings yet
- EE362K: Introduction To Automatic Control: Spring Semester 2015Document3 pagesEE362K: Introduction To Automatic Control: Spring Semester 2015Susana RebellónNo ratings yet
- EE4504 Design of Clean Energy Systems - OBTLDocument6 pagesEE4504 Design of Clean Energy Systems - OBTLAaron TanNo ratings yet
- 4E3 16 OutlineDocument5 pages4E3 16 OutlinevivianNo ratings yet
- MATH1015 Calculus and Linear Algebra I (Advanced) Class ScheduleDocument11 pagesMATH1015 Calculus and Linear Algebra I (Advanced) Class SchedulebobNo ratings yet
- PLC Plan PDFDocument125 pagesPLC Plan PDFobaidur_rehman_3No ratings yet
- CS Lecture 1Document6 pagesCS Lecture 1sadaf asmaNo ratings yet
- CHAPTER 1 For RevisionDocument11 pagesCHAPTER 1 For RevisionJohn Wendell DimaculanganNo ratings yet
- EE323 Course Outline 2015 v2Document12 pagesEE323 Course Outline 2015 v2Praneel ChandNo ratings yet
- Unit Guide FOSE1025 2022 Session 1Document11 pagesUnit Guide FOSE1025 2022 Session 1bobNo ratings yet
- INST231 Sec1plcDocument122 pagesINST231 Sec1plchassanaagib100% (1)
- Process Control SyllabusDocument4 pagesProcess Control Syllabuslogan6167No ratings yet
- MT221 Control Engineering Course OverviewDocument2 pagesMT221 Control Engineering Course OverviewHanover PedroNo ratings yet
- Control Systems Course OutlineDocument3 pagesControl Systems Course OutlineWaqar AliNo ratings yet
- B. Wayne Bequette - Process Control - Modeling, Design and Simulation - Prentice Hall (2003)Document1,058 pagesB. Wayne Bequette - Process Control - Modeling, Design and Simulation - Prentice Hall (2003)Bruna ParenteNo ratings yet
- Signals Systems Junior ModuleDocument3 pagesSignals Systems Junior Modulecoep05No ratings yet
- Template For Syllabus NEMSU-BISLIGDocument11 pagesTemplate For Syllabus NEMSU-BISLIGronoroaNo ratings yet
- Elet4612k IndustrialautomationandprocesscontrolDocument6 pagesElet4612k IndustrialautomationandprocesscontrolpasinduNo ratings yet
- Linear System Analysis Course SyllabusDocument2 pagesLinear System Analysis Course SyllabusJaime MendezNo ratings yet
- Master Mass Transport and Systems in the LabDocument5 pagesMaster Mass Transport and Systems in the LabNuryanti RokhmanNo ratings yet
- mectronisyll_removedDocument3 pagesmectronisyll_removedDeviprasad N ShettyNo ratings yet
- Unit - Guide - CIVL1001 - 2023 - Session 1, in Person-Scheduled-Weekday, North RydeDocument10 pagesUnit - Guide - CIVL1001 - 2023 - Session 1, in Person-Scheduled-Weekday, North Rydebatodis983No ratings yet
- PLC Programming Examples PDFDocument132 pagesPLC Programming Examples PDFDeepak Nayak75% (12)
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- Systems Analysis and Synthesis: Bridging Computer Science and Information TechnologyFrom EverandSystems Analysis and Synthesis: Bridging Computer Science and Information TechnologyNo ratings yet
- System Dynamics for Engineering Students: Concepts and ApplicationsFrom EverandSystem Dynamics for Engineering Students: Concepts and ApplicationsNo ratings yet
- GTY2023-WHT001 SAMPLES PI_GTYDocument11 pagesGTY2023-WHT001 SAMPLES PI_GTYRajesh RoyNo ratings yet
- L-3/T-2/EEE Date: 07/08/2016: Design'? Trench IsolationDocument33 pagesL-3/T-2/EEE Date: 07/08/2016: Design'? Trench IsolationRajesh RoyNo ratings yet
- L-3/T-2/EEE Date: 11/07/2011: Section - ADocument30 pagesL-3/T-2/EEE Date: 11/07/2011: Section - ARajesh RoyNo ratings yet
- MATH 357: L-2/T - 2/EEE Date: 15/0112017Document20 pagesMATH 357: L-2/T - 2/EEE Date: 15/0112017Rajesh RoyNo ratings yet
- Ax Ay-Az) X Ax Ay Az) : Date: 16/07/2016Document24 pagesAx Ay-Az) X Ax Ay Az) : Date: 16/07/2016Rajesh RoyNo ratings yet
- B' (Jffa':, L-2/T-L/Ee ( 'Document22 pagesB' (Jffa':, L-2/T-L/Ee ( 'Rajesh RoyNo ratings yet
- Lecture1Fall2016Document12 pagesLecture1Fall2016Rajesh RoyNo ratings yet
- LED Survey Report 2023Document1 pageLED Survey Report 2023Rajesh RoyNo ratings yet
- Thermal Physics Exam QuestionsDocument18 pagesThermal Physics Exam QuestionsRajesh RoyNo ratings yet
- Curriculum Vitae of Rajesh Roy - 2021Document3 pagesCurriculum Vitae of Rajesh Roy - 2021Rajesh RoyNo ratings yet
- 2014-2015 (L-3, T-1) - EeeDocument17 pages2014-2015 (L-3, T-1) - EeeRajesh RoyNo ratings yet
- Advances in Sensors Vol 4Document507 pagesAdvances in Sensors Vol 4Rajesh RoyNo ratings yet
- MATH 259: L-lIT-lIEEE Date: 07/08/2016Document15 pagesMATH 259: L-lIT-lIEEE Date: 07/08/2016Rajesh RoyNo ratings yet
- Nakirijja CoNAS BachelorDocument26 pagesNakirijja CoNAS BachelorRajesh RoyNo ratings yet
- Walton Headquarters: Meeting Attendance SheetDocument1 pageWalton Headquarters: Meeting Attendance SheetRajesh RoyNo ratings yet
- Training Attendance Sheet 2021Document1 pageTraining Attendance Sheet 2021Rajesh RoyNo ratings yet
- Lecture Notes On: Bee 1711 Power System-IiiDocument88 pagesLecture Notes On: Bee 1711 Power System-IiiSatyanarayana GurramNo ratings yet
- Ds Short LecturesDocument53 pagesDs Short Lecturesamit_coolbuddy20No ratings yet
- Solar Notes PDFDocument178 pagesSolar Notes PDFjaiNo ratings yet
- Potential Failure Mode and Effect Analysis: Design FMEADocument2 pagesPotential Failure Mode and Effect Analysis: Design FMEARajesh RoyNo ratings yet
- Visit CercularDocument3 pagesVisit CercularRajesh RoyNo ratings yet
- Lecture Notes On E-Commerce &cyber Laws Course Code:Bcs-402: Dept of Cse & It VSSUT, BurlaDocument77 pagesLecture Notes On E-Commerce &cyber Laws Course Code:Bcs-402: Dept of Cse & It VSSUT, BurlachhotuNo ratings yet
- Chapter 6 NewDocument68 pagesChapter 6 NewRajesh RoyNo ratings yet
- Power Electrnics Notes PDFDocument78 pagesPower Electrnics Notes PDFAditya SolankiNo ratings yet
- Electrical Drives and Traction Lecture NotesDocument64 pagesElectrical Drives and Traction Lecture NotesJayaprakash DasNo ratings yet
- Electrical Engineering MaterialsDocument53 pagesElectrical Engineering MaterialsBijayKumarDasNo ratings yet
- 115108104Document747 pages115108104Rajesh RoyNo ratings yet
- Data Base EnggDocument116 pagesData Base EnggPendem Sai SrujanNo ratings yet
- ECE SyllabusDocument30 pagesECE Syllabusতাহমিম হোসেন তূর্যNo ratings yet
- Digital Circuits DesignDocument72 pagesDigital Circuits DesignNageswara Rao RatipalliNo ratings yet
- Parts Mini VRFDocument5 pagesParts Mini VRFbitorrenta6bitoNo ratings yet
- Owner's Manual & Safety InstructionsDocument12 pagesOwner's Manual & Safety InstructionsJVH19780% (1)
- LPC Assignment 02Document5 pagesLPC Assignment 02Muhammad Sarfraz MeoNo ratings yet
- Yuken ASE3, 5, 10 Manual&instrukcjaDocument82 pagesYuken ASE3, 5, 10 Manual&instrukcjaJaved AliNo ratings yet
- TD ED enDocument68 pagesTD ED enAshraf AbdelsalamNo ratings yet
- BS BS 1:2002: and Alarm Systems For BuildingsDocument27 pagesBS BS 1:2002: and Alarm Systems For BuildingsMHEP_DANIEL100% (1)
- 24/7 Servo Motor Repair ServicesDocument78 pages24/7 Servo Motor Repair Servicesxtito2No ratings yet
- SGP 2019 Objective QuestionsDocument7 pagesSGP 2019 Objective Questionsdenkulu gaaduNo ratings yet
- 05a3 - E70 Comfort AccessDocument18 pages05a3 - E70 Comfort AccessAlwyn KalapuracanNo ratings yet
- Electricity Safety Regulations 2010Document185 pagesElectricity Safety Regulations 2010jamesNo ratings yet
- LM-K3960A LMS-K3960V 3CD Changer Service ManualDocument65 pagesLM-K3960A LMS-K3960V 3CD Changer Service Manualluisrey1967No ratings yet
- Principles of Electronic Communication Lecture on Amplitude ModulationDocument15 pagesPrinciples of Electronic Communication Lecture on Amplitude ModulationyashNo ratings yet
- Miniature Circuit Breakers GuideDocument43 pagesMiniature Circuit Breakers GuidettarwinNo ratings yet
- ML 20 EsDocument8 pagesML 20 EsMohamed Karakache50% (2)
- Electonics Final HandoutsDocument84 pagesElectonics Final HandoutsDiane BasilioNo ratings yet
- Modern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012Document3 pagesModern Power System Matlab Simulation, Pspice, SVC-HVDC Transmission, STATCOM, Location of Facts, Power System ME, M.tech, B.Tech, BE Final Year IEEE Projects 2011 - 2012srini_792002No ratings yet
- Question Paper Robotics and Arduino ProgrammingDocument1 pageQuestion Paper Robotics and Arduino Programmingveeramaniks408No ratings yet
- In Uence of Building Structures On The Lightning Return Stroke CurrentDocument10 pagesIn Uence of Building Structures On The Lightning Return Stroke CurrentToky Fanambinana RanaivoarisoaNo ratings yet
- Datasheet 80010826Document8 pagesDatasheet 80010826slavunNo ratings yet
- Canopen Gra-Grn: Digital OutputDocument40 pagesCanopen Gra-Grn: Digital OutputSathish J EceNo ratings yet
- EN. mrt3-3 PDFDocument126 pagesEN. mrt3-3 PDFemrecan cincanNo ratings yet
- Thermal Overload and Electronic Relay Technical DataDocument18 pagesThermal Overload and Electronic Relay Technical DataDarío AsteteNo ratings yet
- System House Electrical Panel SolutionsDocument17 pagesSystem House Electrical Panel SolutionsrkinspiresNo ratings yet
- Optimize RS232 and RS422/485 ConnectivityDocument3 pagesOptimize RS232 and RS422/485 ConnectivityPhung CuongNo ratings yet
- ArduinoDocument3 pagesArduinoCrash ZerocoolNo ratings yet
- How Does and Electric Motor Work?: Diagram 1 Diagram 2Document1 pageHow Does and Electric Motor Work?: Diagram 1 Diagram 2ali7167No ratings yet
- KADETT - Fault Codes GMDocument2 pagesKADETT - Fault Codes GMbelacrkva0% (1)
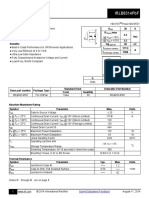
- Irlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130ADocument8 pagesIrlb8314Pbf: Application V 30 V R Max 2.4 M 3.2 QG 40 NC I 171 A I 130AJosè Miguel López RodriguezNo ratings yet
- Assignment 10 Alarm SystemDocument27 pagesAssignment 10 Alarm SystemChee WungNo ratings yet
- Tem-Evo System and Mwm2032 - TEM EVO-Programmable Logic Controllers (PLC) - Eng-TipsDocument3 pagesTem-Evo System and Mwm2032 - TEM EVO-Programmable Logic Controllers (PLC) - Eng-TipsJafarShojaNo ratings yet