You might also like
- Nonlinear Ordinary Differential Equations in Transport ProcessesFrom EverandNonlinear Ordinary Differential Equations in Transport ProcessesNo ratings yet
- Forces & Moments Measurement in Wind TunnelsDocument13 pagesForces & Moments Measurement in Wind Tunnelsanon_287164994No ratings yet
- BTEC Student Handbook: Pearson BTEC Level 3 National Extended Diploma in Engineering (NQF)Document12 pagesBTEC Student Handbook: Pearson BTEC Level 3 National Extended Diploma in Engineering (NQF)Brill brianNo ratings yet
- Moment of A ForceDocument4 pagesMoment of A ForceReeseNo ratings yet
- Lecture 01Document17 pagesLecture 01David OrtegaNo ratings yet
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocument19 pagesEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttNo ratings yet
- Applications of VectorsDocument12 pagesApplications of VectorsOliviaNo ratings yet
- Equilibrium Statics ProblemsDocument10 pagesEquilibrium Statics ProblemsTheAznNo ratings yet
- EGR 140 Summer 2012 Midterm Review PDFDocument45 pagesEGR 140 Summer 2012 Midterm Review PDFAngel LintonNo ratings yet
- Simplified Text With Workbook in Advanced AlgebraDocument174 pagesSimplified Text With Workbook in Advanced AlgebraJohn MarvelNo ratings yet
- ES 11 Formula Sheet v1Document3 pagesES 11 Formula Sheet v1Sam RuelosNo ratings yet
- Engineering Mechanics Concepts for Rigid Bodies and ParticlesDocument190 pagesEngineering Mechanics Concepts for Rigid Bodies and ParticlesCharan GorentlaNo ratings yet
- Unit-2 Shear Force and Bending MomentDocument7 pagesUnit-2 Shear Force and Bending MomentMouli Sankar100% (1)
- Engineering DrawingDocument3 pagesEngineering DrawingLeonel ZurbitoNo ratings yet
- Ch3 - 3 - 3D ForcesDocument19 pagesCh3 - 3 - 3D ForcesXocolynJade ZooValles100% (1)
- Fom Lec Week 6Document35 pagesFom Lec Week 6nishan_ravin0% (1)
- Statics Vector MechanicsDocument16 pagesStatics Vector MechanicsaliNo ratings yet
- Equilibrium of Rigid BodiesDocument26 pagesEquilibrium of Rigid BodieszeromeansNo ratings yet
- Introduction - Forces, Equilibrium: Chapter HighlightsDocument87 pagesIntroduction - Forces, Equilibrium: Chapter HighlightsJagannath MandalNo ratings yet
- 13.6 Parametric Surfaces and Their Area-Part1Document8 pages13.6 Parametric Surfaces and Their Area-Part1Daniel Gaytan-JenkinsNo ratings yet
- Compound Stress - ProblemDocument1 pageCompound Stress - ProblemPalash RoyChoudhuryNo ratings yet
- Areas by IntegrationDocument9 pagesAreas by IntegrationRona ChanNo ratings yet
- Deflection by Energy MethodsDocument10 pagesDeflection by Energy MethodsMfonobong John EkottNo ratings yet
- Engineering Mechanics Notes2222Document100 pagesEngineering Mechanics Notes2222rajasekharjvNo ratings yet
- Statics ReviewDocument4 pagesStatics Reviewsamir_ssh7151No ratings yet
- Rigid Body Statics Chapter 3 SummaryDocument36 pagesRigid Body Statics Chapter 3 SummaryHaFiy HaZimNo ratings yet
- Engineering Mechanics DistributedForcesDocument47 pagesEngineering Mechanics DistributedForcesChamith KarunadharaNo ratings yet
- Work and Energy TutorialDocument5 pagesWork and Energy TutorialYadana1No ratings yet
- Sectional OrthographicDocument80 pagesSectional OrthographicKrish Hams100% (1)
- Statics Review PDFDocument26 pagesStatics Review PDFSathyajith PinikeshiNo ratings yet
- Complex Integral Hand OutDocument7 pagesComplex Integral Hand OutPrabodaLakruwanRupanandaNo ratings yet
- Lecture Notes (Chapter 2.5 Application of Multiple Integral)Document12 pagesLecture Notes (Chapter 2.5 Application of Multiple Integral)shinee_jayasila2080No ratings yet
- Conjugate Beam MethodDocument11 pagesConjugate Beam Methodsofia galiciaNo ratings yet
- Equilibrium of A Rigid Body Rigid BodyDocument41 pagesEquilibrium of A Rigid Body Rigid BodyJean Zyrelle AuronNo ratings yet
- VectorsDocument55 pagesVectorsGeofrey KanenoNo ratings yet
- Statics Chpt.3Document105 pagesStatics Chpt.3safeer_siddickyNo ratings yet
- Lecture 5 Equillibrium of ForcesDocument41 pagesLecture 5 Equillibrium of ForcesAwais Ahmed MirzaNo ratings yet
- 23-11 BioMechanics (BM)Document2 pages23-11 BioMechanics (BM)Manuel Christhoper Abayon DizonNo ratings yet
- Wedges and ScrewsDocument4 pagesWedges and ScrewsK-Jay Eduku ArmahNo ratings yet
- VECTOR ANALYSIS OF FORCESDocument56 pagesVECTOR ANALYSIS OF FORCESMac KYNo ratings yet
- III Sem Me 2019-20 SessionDocument133 pagesIII Sem Me 2019-20 SessionRahul Gaur0% (1)
- 1-Basic ConceptsDocument47 pages1-Basic Conceptsjaved hussainNo ratings yet
- 3-Dimensional Drawings, or Photographic or Pictorial Drawings. Isometric DrawingDocument12 pages3-Dimensional Drawings, or Photographic or Pictorial Drawings. Isometric DrawingHarshit SolankiNo ratings yet
- Mechanism Synthesis, Graphical - Lect1Document22 pagesMechanism Synthesis, Graphical - Lect1Naveen KanchiNo ratings yet
- Expansion Wave Prandti - MEDDocument10 pagesExpansion Wave Prandti - MEDMohammed SalmanNo ratings yet
- Algebra Hand 0utsDocument8 pagesAlgebra Hand 0utsmary christy mantalabaNo ratings yet
- Mechanics of Solids IntroductionDocument51 pagesMechanics of Solids IntroductionSatish DhanyamrajuNo ratings yet
- Formula For TPDEDocument11 pagesFormula For TPDEGowtham Raj100% (2)
- Dom 2 Marks All UnitsDocument33 pagesDom 2 Marks All Unitsbhuvansparks100% (2)
- PHYSICS QB SolutionDocument94 pagesPHYSICS QB SolutionAashika DhareNo ratings yet
- Position Analysis IntroductionDocument5 pagesPosition Analysis Introductionmuddassir razzaqNo ratings yet
- Approved Calendar of Events 2023-2024 (AB) 1Document3 pagesApproved Calendar of Events 2023-2024 (AB) 1hw hwngethe100% (1)
- ME259 Lecture Slides 2Document43 pagesME259 Lecture Slides 2Fan YangNo ratings yet
- Applied Mechanics PDFDocument18 pagesApplied Mechanics PDFSrinivas KandukuriNo ratings yet
- Vectors - Definition, Properties and Algebra: Topic B1.1Document24 pagesVectors - Definition, Properties and Algebra: Topic B1.1Julian GulifaNo ratings yet
- Interpolation Direct MethodDocument16 pagesInterpolation Direct MethodSri Peni WijayantiNo ratings yet
- Spacecraft Attitude Control: A Linear Matrix Inequality ApproachFrom EverandSpacecraft Attitude Control: A Linear Matrix Inequality ApproachNo ratings yet
- Ordinary Differential Equations: 1971 NRL—MRC ConferenceFrom EverandOrdinary Differential Equations: 1971 NRL—MRC ConferenceLeonard WeissNo ratings yet
- A Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsFrom EverandA Collection of Problems on Mathematical Physics: International Series of Monographs in Pure and Applied MathematicsNo ratings yet
- Midas Gen: 1. Design InformationDocument1 pageMidas Gen: 1. Design InformationNyx Phoebe WPNo ratings yet
- MIDAS Information Technology Co., LTDDocument2 pagesMIDAS Information Technology Co., LTDErleNo ratings yet
- Midas Gen: 1. Design InformationDocument1 pageMidas Gen: 1. Design InformationNyx Phoebe WPNo ratings yet
- Midas Gen: 1. Design InformationDocument1 pageMidas Gen: 1. Design InformationNyx Phoebe WPNo ratings yet
- MIDAS Information Technology Co., LTDDocument6 pagesMIDAS Information Technology Co., LTDErleNo ratings yet
- Managing Generalized Anxiety Disorder: CBT Intervention for Worrying MotherDocument20 pagesManaging Generalized Anxiety Disorder: CBT Intervention for Worrying MotherErleNo ratings yet
- Ar 2181 Toa Group 2 FinalDocument31 pagesAr 2181 Toa Group 2 FinalErleNo ratings yet
- Introduction To The of The Human Person: PhilosophyDocument29 pagesIntroduction To The of The Human Person: PhilosophyMarco100% (9)
- MIDAS Information Technology Co., LTDDocument2 pagesMIDAS Information Technology Co., LTDErleNo ratings yet
- Reviewer For First Periodical - ABM G12Document4 pagesReviewer For First Periodical - ABM G12ErleNo ratings yet
- Architectural Lettering StyleDocument3 pagesArchitectural Lettering StyleAnnhe BucalNo ratings yet
- M1 Introduction To StaticsDocument29 pagesM1 Introduction To StaticsErleNo ratings yet
- Section 1-0 History PDFDocument202 pagesSection 1-0 History PDF16gamiNo ratings yet
- When The Word Tax Is MentionedDocument1 pageWhen The Word Tax Is MentionedErleNo ratings yet
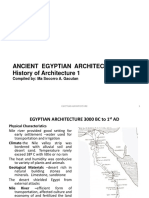
- Ancient Egyptian Architecture History of Architecture 1: Compiled By: Ma Socorro A. GacutanDocument39 pagesAncient Egyptian Architecture History of Architecture 1: Compiled By: Ma Socorro A. GacutanDenzel NgNo ratings yet
- J.D.salinger-De Veghe in Lanul de SecaraDocument14 pagesJ.D.salinger-De Veghe in Lanul de SecaraAnna Lintu Diaconu33% (3)
- Villa SavoyeDocument2 pagesVilla SavoyeErleNo ratings yet
- Section 1-0 History PDFDocument202 pagesSection 1-0 History PDF16gamiNo ratings yet
- Licensed To Plumb: Audio AlternativeDocument2 pagesLicensed To Plumb: Audio AlternativeErleNo ratings yet
- Architecture of France (Art Ebook)Document368 pagesArchitecture of France (Art Ebook)elyscribd100% (3)
- Architecture Portfolio - by SlidesgoDocument84 pagesArchitecture Portfolio - by Slidesgobibe retro sablonNo ratings yet
- Sample ResumeDocument3 pagesSample ResumeMaribelNo ratings yet
- The Study of The Influence of FunctionalDocument10 pagesThe Study of The Influence of FunctionalErleNo ratings yet
- What Is Brno? FunctionalismDocument50 pagesWhat Is Brno? FunctionalismErleNo ratings yet
- Architecture Portfolio - by SlidesgoDocument84 pagesArchitecture Portfolio - by Slidesgobibe retro sablonNo ratings yet
- Year Carson BibliaDocument2 pagesYear Carson BibliaRamon M. SosaNo ratings yet
- VILLA SAVOYE - Architecture of France by David A. HanserDocument7 pagesVILLA SAVOYE - Architecture of France by David A. HanserErleNo ratings yet
- Notes TemplateDocument1 pageNotes TemplateErleNo ratings yet
- Module 1: Introduction To Fashion DesignDocument1 pageModule 1: Introduction To Fashion DesignErleNo ratings yet
- TRVDocument4 pagesTRVSumit SawaiNo ratings yet
- StuckPipePro - Stuck Pipe Analysis SoftwareDocument2 pagesStuckPipePro - Stuck Pipe Analysis SoftwarePegasus Vertex, Inc.No ratings yet
- Power Generation Manual 1111Document64 pagesPower Generation Manual 1111Mr Khadim HussainNo ratings yet
- Ch.13 Fun With Magnets Class 6Document4 pagesCh.13 Fun With Magnets Class 6Verma Sheela100% (1)
- Electricity in Diseases of The Eye, Ear, Nose and Throat (1912)Document618 pagesElectricity in Diseases of The Eye, Ear, Nose and Throat (1912)JamesNo ratings yet
- Synopsis Synopsis Synopsis Synopsis: D D D DDocument1 pageSynopsis Synopsis Synopsis Synopsis: D D D DAishwarya ShuklaNo ratings yet
- AC servo systems P3 Servomotors specificationsDocument6 pagesAC servo systems P3 Servomotors specificationsvespoNo ratings yet
- Physics XIDocument2 pagesPhysics XISaajan MaharjanNo ratings yet
- Magnetic Effects of Electric CurrentDocument18 pagesMagnetic Effects of Electric CurrentMayurItankarNo ratings yet
- MathematicsDocument4 pagesMathematicsLalith77No ratings yet
- Modulation MLIDocument5 pagesModulation MLImauricetappaNo ratings yet
- Formula Fizik SPM 2021Document3 pagesFormula Fizik SPM 2021kamalharmoza874950% (2)
- HV-Pulse Cable RG220/U 50 Ohm FRNC-C: CLP50 - Coaxial High Voltage CableDocument2 pagesHV-Pulse Cable RG220/U 50 Ohm FRNC-C: CLP50 - Coaxial High Voltage Cablehitesh7kNo ratings yet
- Electrical Signature AnalysisDocument25 pagesElectrical Signature AnalysisChandradeep BanerjeeNo ratings yet
- DS - SG33CX SG40CX SG50CX Datasheet - V14 - EN - pdf2021Document2 pagesDS - SG33CX SG40CX SG50CX Datasheet - V14 - EN - pdf2021Agus SalimNo ratings yet
- Attenuation of Sound Waves ExplainedDocument2 pagesAttenuation of Sound Waves ExplainedMomo ItachiNo ratings yet
- Experiment Instructions: SE 110.20 Deformation of FramesDocument14 pagesExperiment Instructions: SE 110.20 Deformation of FramesMohamad Fakrurozie Bin Che SamsuzukiNo ratings yet
- 2 Induction Installations PDFDocument41 pages2 Induction Installations PDFAndoni Garcia MatxainNo ratings yet
- HV-CONNEX Separable - Data Sheet Connex Size 6S - ConnectorDocument3 pagesHV-CONNEX Separable - Data Sheet Connex Size 6S - ConnectorGlenys MuñozNo ratings yet
- Solenoids Principle of OperationDocument12 pagesSolenoids Principle of OperationSorin RobertNo ratings yet
- Selfcharging Battery System On Page 377 SankhyakarikaDocument497 pagesSelfcharging Battery System On Page 377 SankhyakarikaourbobbyNo ratings yet
- Bill of Material For Panels - Apl - NewDocument54 pagesBill of Material For Panels - Apl - Newp mahesh goudNo ratings yet
- Reciprocating Compressor Foundation Design With Driven Steel PilesDocument27 pagesReciprocating Compressor Foundation Design With Driven Steel Pileskaty parraNo ratings yet
- Sai HarishDocument32 pagesSai HarishPurushottam RoyNo ratings yet
- W 48 × H 48 MM Power ON Delay Analog Timers: ATE8 SeriesDocument3 pagesW 48 × H 48 MM Power ON Delay Analog Timers: ATE8 Seriesyanier martinezNo ratings yet
- LAB NO 2.... FrictionDocument14 pagesLAB NO 2.... FrictionShayan AliNo ratings yet
- Stepper MotorDocument9 pagesStepper MotorSuraj KumarNo ratings yet
- Physics II Problems PDFDocument1 pagePhysics II Problems PDFBOSS BOSSNo ratings yet
- Microgrid ProtectionDocument22 pagesMicrogrid ProtectionEleanyRestrepoNo ratings yet