You might also like
- Modeling of Complex Systems: Application to Aeronautical DynamicsFrom EverandModeling of Complex Systems: Application to Aeronautical DynamicsNo ratings yet
- Ntccpptarunschanges2017 11 28 180318195538Document27 pagesNtccpptarunschanges2017 11 28 180318195538leorio88No ratings yet
- Itu Lecture4 5 Rev01Document52 pagesItu Lecture4 5 Rev01Gülsüm YesirNo ratings yet
- Phase I: Modeling the Equations of Motion for Aircraft DynamicsDocument26 pagesPhase I: Modeling the Equations of Motion for Aircraft DynamicsDavid SchmidtNo ratings yet
- Mathematical Modeling of an Underwater RobotDocument11 pagesMathematical Modeling of an Underwater RobotbhathiyaengNo ratings yet
- Lecture 1Document31 pagesLecture 1gabrielmamane321No ratings yet
- C01-2007-ColluPatelTrarieux ICMRT07 PDFDocument11 pagesC01-2007-ColluPatelTrarieux ICMRT07 PDFMaurizio ColluNo ratings yet
- CFD Project on Eyring-Powell Fluid FlowDocument9 pagesCFD Project on Eyring-Powell Fluid FlowAnonymous Zsi5ODm2PYNo ratings yet
- Advanced Flight Dynamics - Lec10Document34 pagesAdvanced Flight Dynamics - Lec10Davood AsadihendoustaniNo ratings yet
- Lecture 2Document57 pagesLecture 2gabrielmamane321No ratings yet
- Understanding Aircraft Stability and ControlDocument26 pagesUnderstanding Aircraft Stability and Controlchess kingsNo ratings yet
- FM IiDocument66 pagesFM IiJeeva's GamingNo ratings yet
- Modelling and Simulation of A Quad-Rotor Helicopter: A. Bousbaine, M. H. Wu, G. T. PoyiDocument6 pagesModelling and Simulation of A Quad-Rotor Helicopter: A. Bousbaine, M. H. Wu, G. T. PoyiDalia MuraddNo ratings yet
- Introduction - 2 Topics: Flight Dynamics - II Prof. E.G. Tulapurkara Stability and ControlDocument10 pagesIntroduction - 2 Topics: Flight Dynamics - II Prof. E.G. Tulapurkara Stability and Controlmd arifNo ratings yet
- Missile Roll Autopilot OverviewDocument11 pagesMissile Roll Autopilot OverviewD.Viswanath100% (1)
- AD&C Lecture 1newDocument78 pagesAD&C Lecture 1newinnobobothebossNo ratings yet
- Aircraft DynamicsDocument26 pagesAircraft Dynamicszero lift100% (1)
- Flight DynamicsDocument49 pagesFlight DynamicsVũ Huy MừngNo ratings yet
- Lecturenote F13Document159 pagesLecturenote F13rohitNo ratings yet
- A Unified Mathematical Model For High Speed Hybrid (Air and Water-Borne) VehiclesDocument10 pagesA Unified Mathematical Model For High Speed Hybrid (Air and Water-Borne) VehiclesMaurizio100% (1)
- Helicopter Flight Dynamics Course OverviewDocument34 pagesHelicopter Flight Dynamics Course OverviewAlexandreSidantNo ratings yet
- Aircraft Principal AxesDocument4 pagesAircraft Principal Axesdigital_ajay71No ratings yet
- MAE331Lecture8 PDFDocument24 pagesMAE331Lecture8 PDFPranav BhardwajNo ratings yet
- Flight Dynamics (Fixed Wing Aircraft)Document17 pagesFlight Dynamics (Fixed Wing Aircraft)MOFEEZALAM100% (1)
- Hexacopter Using MATLAB Simulink and MPUDocument5 pagesHexacopter Using MATLAB Simulink and MPUMariana MartínezNo ratings yet
- Intro To Aerial Robotics - Coordinate FramesDocument34 pagesIntro To Aerial Robotics - Coordinate FramesKostas AlexisNo ratings yet
- IITB Navigation and Guidance LectureDocument36 pagesIITB Navigation and Guidance LectureNinad KaleNo ratings yet
- Lecture 3 Kinematics and DynamicsDocument53 pagesLecture 3 Kinematics and Dynamicsyurong FengNo ratings yet
- Quadcopter Simulation: Jose Carlos LopezDocument4 pagesQuadcopter Simulation: Jose Carlos Lopezimran5705074No ratings yet
- Week 07 – Attitude Dynamics and DeterminaitonDocument58 pagesWeek 07 – Attitude Dynamics and Determinaitoncoolgirl2611No ratings yet
- Untitled PDFDocument36 pagesUntitled PDFkuroko tetsuNo ratings yet
- Chapter 2 Systems of Axes and Notation 2013 Flight Dynamics PrinciplesDocument20 pagesChapter 2 Systems of Axes and Notation 2013 Flight Dynamics PrinciplesMinseung KuNo ratings yet
- Kinematics of MechanismsDocument82 pagesKinematics of MechanismsviahulNo ratings yet
- Flight Dynamics (AERO 413)Document28 pagesFlight Dynamics (AERO 413)Rahis Pal SinghNo ratings yet
- Automatic Flight Control Full VersionDocument26 pagesAutomatic Flight Control Full VersionMohammad Reza MadadiNo ratings yet
- Systems of Axes and NotationDocument7 pagesSystems of Axes and NotationAlexis MontañezNo ratings yet
- ASC-mod 3-Dynamic Longitudinal StabilityDocument32 pagesASC-mod 3-Dynamic Longitudinal StabilityJason JeevanNo ratings yet
- A Review of Attitude Kinematics For Aircraft Flight SimulationDocument25 pagesA Review of Attitude Kinematics For Aircraft Flight SimulationMatheus FurstenbergerNo ratings yet
- Fundamentals of Vehicle Dynamics: Lecture 1-2Document26 pagesFundamentals of Vehicle Dynamics: Lecture 1-2obeidNo ratings yet
- HAL Aircraft PartsDocument44 pagesHAL Aircraft PartsNag HebbaniNo ratings yet
- MECH223- Final LEcture No. 1 (Plane Motion of Rigid Bodies)Document20 pagesMECH223- Final LEcture No. 1 (Plane Motion of Rigid Bodies)Ibo, Kim CaesarNo ratings yet
- Solar Aircraft Final Seminar Report PDFDocument39 pagesSolar Aircraft Final Seminar Report PDFRohit HarpudeNo ratings yet
- Direction Cosine Matrix IMU: TheoryDocument30 pagesDirection Cosine Matrix IMU: TheoryNeelam ShuklaNo ratings yet
- Chapter 5 Airplanes Stability and ControlDocument40 pagesChapter 5 Airplanes Stability and ControlIshaq AhmedNo ratings yet
- Report PDFDocument5 pagesReport PDFAhmed ElnemaNo ratings yet
- 14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02Document257 pages14 Fixedwingfighteraircraft Flightperformance II 150228115124 Conversion Gate02amrNo ratings yet
- Aircraft Autostabilization SystemDocument21 pagesAircraft Autostabilization SystemPushkala RaviNo ratings yet
- Kyawmyat Thu and Gavrilov Alexander Igorevich: Analysis, Design and Implementation of Quadcopter Control SystemDocument7 pagesKyawmyat Thu and Gavrilov Alexander Igorevich: Analysis, Design and Implementation of Quadcopter Control SystemZev ZekNo ratings yet
- INS/IRS gyro-stabilized platform explainedDocument3 pagesINS/IRS gyro-stabilized platform explainedTapasya NathNo ratings yet
- InTech-Robust Path Following For Uav Using Pure Pursuit GuidanceDocument21 pagesInTech-Robust Path Following For Uav Using Pure Pursuit GuidanceedwardsilvaNo ratings yet
- Equations of Motion: Body - Fixed Coordinate SystemDocument2 pagesEquations of Motion: Body - Fixed Coordinate SystemNarendra Singh MauryaNo ratings yet
- Dynamics: Kinematics of Rigid BodiesDocument12 pagesDynamics: Kinematics of Rigid BodiesAizuddinNo ratings yet
- Gearing Basic 1 : 1 Classification of Gears 1.1 What Is A Gear? 1.2 Shaft Arrangement 1.3 Gear TypesDocument21 pagesGearing Basic 1 : 1 Classification of Gears 1.1 What Is A Gear? 1.2 Shaft Arrangement 1.3 Gear TypesJojee MarieNo ratings yet
- Modeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsDocument26 pagesModeling and Simulation of 9-DOF Parafoil-Payload System Flight DynamicsMano PrakashNo ratings yet
- Chapter 1 Introduction To Vehicle DynamicsDocument20 pagesChapter 1 Introduction To Vehicle DynamicsWARRIOR GAMINGNo ratings yet
- DCM Orientation Matrix IMU TheoryDocument30 pagesDCM Orientation Matrix IMU Theoryasso2412No ratings yet
- Lecture 3Document31 pagesLecture 3Wolf DragonneNo ratings yet
- LCHS 4000 LNG Description of System EngDocument34 pagesLCHS 4000 LNG Description of System EngAhmad ImranNo ratings yet
- MS 9001 eDocument58 pagesMS 9001 eAlexey Marchenko100% (2)
- Power Generation System With Low Enthalpy Geothermal Source:Kalina CycleDocument9 pagesPower Generation System With Low Enthalpy Geothermal Source:Kalina CycleInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Marine Engine Application and Installation Guide: - Boat PerformanceDocument13 pagesMarine Engine Application and Installation Guide: - Boat Performancefernando hutnikNo ratings yet
- Wall Climbing RobotDocument5 pagesWall Climbing RobottarasasankaNo ratings yet
- JC10 JOYSTICK CONTROL SYSTEM OPERATION MANUAL - Unlocked (OCR)Document32 pagesJC10 JOYSTICK CONTROL SYSTEM OPERATION MANUAL - Unlocked (OCR)이리재No ratings yet
- 345 Hyd SysDocument5 pages345 Hyd SysMaimun maimunNo ratings yet
- 160145-Denso Poster Alternator 594x420 OnlineDocument1 page160145-Denso Poster Alternator 594x420 Onlinesupljina100% (1)
- Fan Coil Unit PPM ChecklistDocument2 pagesFan Coil Unit PPM Checklistobaidur_rehman_3No ratings yet
- Introduction To Quantum Physics NotesDocument9 pagesIntroduction To Quantum Physics NotesViraj BukitagarNo ratings yet
- Drilling ProblemsDocument14 pagesDrilling Problemsموسى عليNo ratings yet
- HVAC Load Analysis for Hospital de Contingencia San AntonioDocument17 pagesHVAC Load Analysis for Hospital de Contingencia San AntonioIsaac Sthidf Sanchez CabezasNo ratings yet
- API PLAN 62 - Installation of Steam Traps in Steam QuenchDocument3 pagesAPI PLAN 62 - Installation of Steam Traps in Steam Quenchrmehta26No ratings yet
- Mass Transfer Aka Sir AssignmentDocument4 pagesMass Transfer Aka Sir Assignmentওয়াসিমNo ratings yet
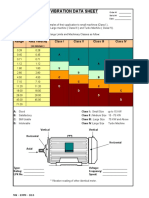
- Vibration Data Sheet ISO ClassesDocument1 pageVibration Data Sheet ISO ClassesZeeshan AkhtarNo ratings yet
- Wps FormatDocument2 pagesWps FormatParminder SinghNo ratings yet
- Fundamentals of Computational Fluid DynamicsDocument2 pagesFundamentals of Computational Fluid DynamicsZinsaisal BakriNo ratings yet
- Effects of Bearing Currents on Motor BearingsDocument17 pagesEffects of Bearing Currents on Motor BearingsHarris AnchesNo ratings yet
- Pump Efficiency For Single Stage Centrifugal PumpsDocument8 pagesPump Efficiency For Single Stage Centrifugal PumpsPerrobast100% (1)
- Cylinder Head Gasket (Hatchback) - Installation (05 - 2013 - ) (Cylinder Head Assembly) - Yaris HeadDocument9 pagesCylinder Head Gasket (Hatchback) - Installation (05 - 2013 - ) (Cylinder Head Assembly) - Yaris HeadFran SanchezNo ratings yet
- Coolpack: Cycle SpecificationDocument2 pagesCoolpack: Cycle SpecificationHector Ariel HNNo ratings yet
- Esl IntensifierDocument44 pagesEsl IntensifierdguyNo ratings yet
- Nureg 6007Document122 pagesNureg 6007Baher ElsheikhNo ratings yet
- Design toggle jack lifts heavy loadsDocument13 pagesDesign toggle jack lifts heavy loadsKunal AhiwaleNo ratings yet
- Hilti HUS3 Screw Anchor Technical DatasheetDocument21 pagesHilti HUS3 Screw Anchor Technical DatasheetZerekkuNo ratings yet
- A 252 - 98 Qti1mi05oeux PDFDocument7 pagesA 252 - 98 Qti1mi05oeux PDFHatem MomaniNo ratings yet
- COVID19 Airbus Asset PreservationDocument4 pagesCOVID19 Airbus Asset PreservationsebastienNo ratings yet
- SORG EquipmentDocument56 pagesSORG Equipmentl0% (2)
- Model E & Pe Series Two-Stage ConvertersDocument5 pagesModel E & Pe Series Two-Stage ConverterswritetobjNo ratings yet