You might also like
- Effectively Enhancing Our Soc With Sysmon Powershell Logging and Machine Learning To Detect and Respond To Todays Threats PDFDocument43 pagesEffectively Enhancing Our Soc With Sysmon Powershell Logging and Machine Learning To Detect and Respond To Todays Threats PDFHamza IdrisNo ratings yet
- Interrupts and 8259 ChipDocument48 pagesInterrupts and 8259 ChipYaar RaiderNo ratings yet
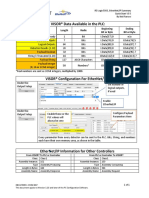
- VISOR EtherNetIP SummaryDocument1 pageVISOR EtherNetIP Summaryivan borrasNo ratings yet
- Unit 4 IO Interfacing HamacherDocument57 pagesUnit 4 IO Interfacing HamacherMr. S. Gladson Oliver Inf. Tech.No ratings yet
- COE305 - Chapter 12Document54 pagesCOE305 - Chapter 12Muzammil Ahmad KhanNo ratings yet
- MSIs: Faster Network InterruptsDocument14 pagesMSIs: Faster Network InterruptsprashanthkumarusNo ratings yet
- A Study On Wireless Intrusion Prevention System Based On SnortDocument12 pagesA Study On Wireless Intrusion Prevention System Based On SnortMarihot SiregarNo ratings yet
- An Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsDocument36 pagesAn Interrupt Is An Event Which Informs The CPU That Its Service (Action) Is Needed. - Sources of InterruptsHemanth KumarNo ratings yet
- IO-Link Data Reference Guide: QS18 Expert EmitterDocument3 pagesIO-Link Data Reference Guide: QS18 Expert EmitterDébora Dos SanttosNo ratings yet
- Ethernet: PC ScadaDocument43 pagesEthernet: PC ScadarockNo ratings yet
- Module 9 - IpchainsDocument8 pagesModule 9 - Ipchainskinglive_scribNo ratings yet
- Profinet HW Config1 v1Document54 pagesProfinet HW Config1 v1abdessamadelforjiNo ratings yet
- Project Delivery Solution Design and DeliveryDocument16 pagesProject Delivery Solution Design and DeliveryfannybrawijayaNo ratings yet
- I PokjmjkDocument20 pagesI Pokjmjkreferenceref31No ratings yet
- Input / Output Operations - Input / Output OperationsDocument49 pagesInput / Output Operations - Input / Output OperationsRavi TejNo ratings yet
- Delta VDocument55 pagesDelta VAkshay PatelNo ratings yet
- I/O Virtualization With Hardware Support: Ubaid H. and Vasia PDocument24 pagesI/O Virtualization With Hardware Support: Ubaid H. and Vasia PKarthik SunkesulapatiNo ratings yet
- Core SlidesDocument44 pagesCore SlidesSérgio Locatelli JúniorNo ratings yet
- COA Lecture 23 Interupt Driven Io PDFDocument15 pagesCOA Lecture 23 Interupt Driven Io PDFA3 AashuNo ratings yet
- 8086/8088 Interrupt TutorialDocument5 pages8086/8088 Interrupt TutorialjonycrashNo ratings yet
- CO - Lecture 10Document11 pagesCO - Lecture 10Daddy YouNo ratings yet
- Interrupts: Embedded Software DesignDocument56 pagesInterrupts: Embedded Software DesignSukumar DasNo ratings yet
- Data Transfer Techniques ExplainedDocument12 pagesData Transfer Techniques ExplainedPrashant RawatNo ratings yet
- Midterm Recap: Performance EvaluationDocument5 pagesMidterm Recap: Performance EvaluationShivam AgarwalNo ratings yet
- Eip-94-Plb Sas Appendix CDocument17 pagesEip-94-Plb Sas Appendix CneelamvamsiNo ratings yet
- iRMX® Extended System Calls Reference Manual: Order Number: 462916-001Document172 pagesiRMX® Extended System Calls Reference Manual: Order Number: 462916-001henkpiepNo ratings yet
- 06 - InterruptsDocument23 pages06 - InterruptsKhloud MousadNo ratings yet
- L13 Input Output OrganizationDocument57 pagesL13 Input Output OrganizationRajdeep BoraNo ratings yet
- Input Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Document62 pagesInput Output Organisation: BY: Vaishakh B N USN:1RV09CS1114Vaishakh BaragurNo ratings yet
- Ch13 InterruptDocument41 pagesCh13 InterruptMir4 BritoNo ratings yet
- 30 COMANDOS IOS (Modo de Compatibilidade)Document30 pages30 COMANDOS IOS (Modo de Compatibilidade)CarlosAugustoNo ratings yet
- Microcontrollers InterruptsDocument7 pagesMicrocontrollers InterruptsGilbert AndanjeNo ratings yet
- Ccna Icnd PPT 2.0 D20S01L03Document26 pagesCcna Icnd PPT 2.0 D20S01L03AMIT RAJ KAUSHIK100% (1)
- Department of Computer Science and Engineering: Interrupt-Driven I/ODocument7 pagesDepartment of Computer Science and Engineering: Interrupt-Driven I/Onandhithaa.a.cse.2022No ratings yet
- CSA/CIID/FORM/001 VER1.0 CII record land transport DTL signallingDocument30 pagesCSA/CIID/FORM/001 VER1.0 CII record land transport DTL signallingNur Shahidah Binte AhmadNo ratings yet
- Ip Board InstallationDocument4 pagesIp Board InstallationAhmed GunaidNo ratings yet
- K300 ML1400 Indexing Example CodeDocument7 pagesK300 ML1400 Indexing Example CodeEmerson Müller Juarez AvilaNo ratings yet
- Microcontroller Applications: Input / Output PortsDocument6 pagesMicrocontroller Applications: Input / Output PortskaranNo ratings yet
- Module III Interrupts in 8086: Types, NMI, INTR, ISRDocument19 pagesModule III Interrupts in 8086: Types, NMI, INTR, ISRSagar ChaulagaiNo ratings yet
- Input Output Interface: I/O Device ExamplesDocument7 pagesInput Output Interface: I/O Device Examplesbatman2407No ratings yet
- Input and Output. Supervisor Mode, Exceptions, Traps. Co-ProcessorsDocument53 pagesInput and Output. Supervisor Mode, Exceptions, Traps. Co-ProcessorsLordwin MichealNo ratings yet
- Polled IO Versus Interrupt Driven IODocument37 pagesPolled IO Versus Interrupt Driven IONabil QureshiNo ratings yet
- Prasun Ghosal: Computer Organization and ArchitectureDocument3 pagesPrasun Ghosal: Computer Organization and ArchitectureAnindyaKunduNo ratings yet
- Chapter Fourteen: Interrupts in x86 PCDocument18 pagesChapter Fourteen: Interrupts in x86 PCUsman RasheedNo ratings yet
- Ch11 InterruptDocument29 pagesCh11 InterruptRajendra RajuNo ratings yet
- Quick Guide Connect SCAEdge Azure IoTDocument14 pagesQuick Guide Connect SCAEdge Azure IoTAldo RahmadNo ratings yet
- Data Warehouse/Data Mart: Components Concepts CharacteristicsDocument24 pagesData Warehouse/Data Mart: Components Concepts Characteristicsjkpt1880% (1)
- 009-1969-01 Savant IP Audio WiSA Bridge (Stereo) QRGDocument2 pages009-1969-01 Savant IP Audio WiSA Bridge (Stereo) QRGTung Vu.No ratings yet
- EMP056EA-02 (Trending)Document39 pagesEMP056EA-02 (Trending)scottt_84No ratings yet
- Lab 1.5.2 - Basic Router ConfigurationDocument4 pagesLab 1.5.2 - Basic Router Configurationvictor teopezNo ratings yet
- Diggy 1Document1 pageDiggy 1api-377090598No ratings yet
- Dive into Apple IO80211Family AgainDocument54 pagesDive into Apple IO80211Family AgainJulio César Galindo CáceresNo ratings yet
- 富士通株式会社|採用特設サイト募集一覧Document1 page富士通株式会社|採用特設サイト募集一覧iroshimakimuNo ratings yet
- Data Processing Cycle: Input Process OutputDocument30 pagesData Processing Cycle: Input Process OutputNoremah ARNo ratings yet
- Chapter 7 Interrupts of 8085Document20 pagesChapter 7 Interrupts of 8085shubhankar pal100% (1)
- Interrupts and Exceptions: COMS W6998 Spring 2010Document59 pagesInterrupts and Exceptions: COMS W6998 Spring 2010Sneha ChavanNo ratings yet
- C (Console I-O)Document8 pagesC (Console I-O)deep11680No ratings yet
- By Vijay Kumar. K Dept. of ECE JntuacekDocument63 pagesBy Vijay Kumar. K Dept. of ECE JntuacekAnil DharavathNo ratings yet
- DGTL Tscsec 507Document31 pagesDGTL Tscsec 507abaheabaheNo ratings yet
- Ch21 Presn PDFDocument30 pagesCh21 Presn PDFAlee LópezNo ratings yet
- Pattern Recognition Case Study: EKG AnalysisDocument14 pagesPattern Recognition Case Study: EKG AnalysisAlee LópezNo ratings yet
- Clustering Forest Cover Types Using SOMDocument10 pagesClustering Forest Cover Types Using SOMAlee LópezNo ratings yet
- Prediction Case Study: Magnetic LevitationDocument15 pagesPrediction Case Study: Magnetic LevitationAlee LópezNo ratings yet
- Ch20 Presn PDFDocument21 pagesCh20 Presn PDFAlee LópezNo ratings yet
- Ch19 Presn PDFDocument30 pagesCh19 Presn PDFAlee LópezNo ratings yet
- Embedded Systems Design: A Unified Hardware/Software IntroductionDocument39 pagesEmbedded Systems Design: A Unified Hardware/Software Introductionnandan_asNo ratings yet
- Minggu 5 Programming Uc 32bitDocument11 pagesMinggu 5 Programming Uc 32bitPahala SamosirNo ratings yet
- Function Approximation Case Study: Smart SensorDocument10 pagesFunction Approximation Case Study: Smart SensorAlee LópezNo ratings yet
- Minggu 4 Uc 32bitDocument41 pagesMinggu 4 Uc 32bitPahala SamosirNo ratings yet
- EL3014 Mikrokontroler AVRDocument40 pagesEL3014 Mikrokontroler AVRSyarif KotoNo ratings yet
- Minggu 7 RTOS 2Document11 pagesMinggu 7 RTOS 2Pahala SamosirNo ratings yet
- Address DecoderDocument11 pagesAddress DecoderPahala SamosirNo ratings yet
- ANN Terbaru 1Document1 pageANN Terbaru 1Pahala SamosirNo ratings yet
- Shared MemoryDocument26 pagesShared MemoryPahala SamosirNo ratings yet
- Analog to Digital Converter Architectures and PerformanceDocument42 pagesAnalog to Digital Converter Architectures and PerformancePahala SamosirNo ratings yet
- Analog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Document23 pagesAnalog-to-Digital Converter (ADC) and Digital-to-Analog Converter (DAC)Pahala SamosirNo ratings yet
- EL3014-Periferal Mikroprosesor Part 2Document22 pagesEL3014-Periferal Mikroprosesor Part 2Pahala SamosirNo ratings yet
- Adc F05Document49 pagesAdc F05magantiphaneendraNo ratings yet
- ADC and DAC Conversion Processes Allow Digital Computers to Interact with Analog SignalsDocument10 pagesADC and DAC Conversion Processes Allow Digital Computers to Interact with Analog SignalsPahala SamosirNo ratings yet
- TPB15 (B) 121370141 Dhena Vania Rethaliazahra Tugas4Document3 pagesTPB15 (B) 121370141 Dhena Vania Rethaliazahra Tugas4Pahala SamosirNo ratings yet
- Solving DEs with Laplace TransformsDocument19 pagesSolving DEs with Laplace TransformsPahala SamosirNo ratings yet
- Ch8 Op Amp Nonlinear Circuits & FiltersDocument31 pagesCh8 Op Amp Nonlinear Circuits & FiltersPahala SamosirNo ratings yet
- Op AmpsDocument47 pagesOp Ampssuresh_karthik_9No ratings yet
- L01 Operational AmplifierDocument27 pagesL01 Operational AmplifierSylvester Delali DordziNo ratings yet
- Dac S05Document42 pagesDac S05Safwan MohamedNo ratings yet
- Adc PDFDocument31 pagesAdc PDFjamiebrown7718No ratings yet
- Features Description: SBVS015Document11 pagesFeatures Description: SBVS015Pahala SamosirNo ratings yet
- FrequenciaDocument15 pagesFrequenciasoninhalNo ratings yet
- Deshmukh - Java SE 11 Programmer I Study Guide 2019Document662 pagesDeshmukh - Java SE 11 Programmer I Study Guide 2019Popescu Adrian80% (5)
- Bods ScriptingDocument3 pagesBods ScriptingLakshmi PNo ratings yet
- Git TutorialDocument20 pagesGit TutorialNaman BhayaniNo ratings yet
- User-defined conversions and copy constructors in CDocument7 pagesUser-defined conversions and copy constructors in CarjunmajumdarNo ratings yet
- JSFSkriptDocument166 pagesJSFSkriptNwwarNo ratings yet
- AspenAdvProcCtrlV12 0-InstDocument86 pagesAspenAdvProcCtrlV12 0-InstLaith HashimNo ratings yet
- Cheat Sheet - Bash2Document1 pageCheat Sheet - Bash2Ambar ShuklaNo ratings yet
- PHP AssignmentDocument37 pagesPHP AssignmentJenna Coleman0% (1)
- MOBILE APP HARDENING Against Reverse EngineeringDocument49 pagesMOBILE APP HARDENING Against Reverse EngineeringBizuneh HailuNo ratings yet
- Computer Science NotesDocument14 pagesComputer Science NotesDiksha SinglaNo ratings yet
- Class ReportDocument4 pagesClass ReportjasonNo ratings yet
- Download Programming in ANSI C by Balagurusamy Third Edition PDF FreeDocument2 pagesDownload Programming in ANSI C by Balagurusamy Third Edition PDF Freenasrin FNo ratings yet
- SQL Chung PDFDocument29 pagesSQL Chung PDFPhạmHọcNo ratings yet
- WhiteHat JR INT 144 MinDocument4 pagesWhiteHat JR INT 144 MinRandomizerNo ratings yet
- What Is Domain ControlerDocument9 pagesWhat Is Domain ControlerWahyu GumelarNo ratings yet
- mvc1 and mvc2Document2 pagesmvc1 and mvc2api-267297868No ratings yet
- "A Full Five To Six Years Before Bricklin and Visicalc": Copy of 1974 ManualDocument40 pages"A Full Five To Six Years Before Bricklin and Visicalc": Copy of 1974 Manualkennethdakin1777100% (6)
- Sen2022 Software Engineering Analysis and DesignDocument84 pagesSen2022 Software Engineering Analysis and DesignElif KaraatlıNo ratings yet
- Introduction To ParsingDocument21 pagesIntroduction To Parsingdeepak kumar bisoyiNo ratings yet
- Mulesoft Developer Resume Example Nationwide - Columbus, OhioDocument5 pagesMulesoft Developer Resume Example Nationwide - Columbus, OhioGris EmeNo ratings yet
- Number 3 Compiler Design CourseworkDocument3 pagesNumber 3 Compiler Design Courseworkiriama emmaNo ratings yet
- Manisha SinghDocument3 pagesManisha SinghKanwaljeet SinghNo ratings yet
- Adobe Acrobat DC SDK Release Notes: Edition 1.0Document4 pagesAdobe Acrobat DC SDK Release Notes: Edition 1.0InquisitiveNo ratings yet
- Tuning FrmWEBDocument16 pagesTuning FrmWEBSupachai TaechapisitNo ratings yet
- Student Management SystemDocument16 pagesStudent Management Systembhargav p.No ratings yet
- Lab 8 OopDocument16 pagesLab 8 OopMuhammad JamalNo ratings yet
- Veritas Netbackup™ For Openstack Administrator'S Guide: Unix, Windows, and Linux With Parallel Stream FrameworkDocument44 pagesVeritas Netbackup™ For Openstack Administrator'S Guide: Unix, Windows, and Linux With Parallel Stream Framework黃國峯No ratings yet
- Process Synchronization Buffer Queue: Producer-Consumer ProblemDocument10 pagesProcess Synchronization Buffer Queue: Producer-Consumer Problemrokr58No ratings yet
- Software Process Modeling With UML and SPEM: Chris Armstrong Armstrong Process GroupDocument34 pagesSoftware Process Modeling With UML and SPEM: Chris Armstrong Armstrong Process GroupKevin Giovanny Vidal CalambasNo ratings yet
- Node js+at+Scale+Vol +1+-+Understanding+the+Node Js+module+system+and+using+npmDocument21 pagesNode js+at+Scale+Vol +1+-+Understanding+the+Node Js+module+system+and+using+npmSrdjan DevNo ratings yet