You might also like
- Elog2017b - 10a - Tanggapan FrekuensiDocument36 pagesElog2017b - 10a - Tanggapan FrekuensiMathiasNo ratings yet
- Easy(er) Electrical Principles for General Class Ham License (2019-2023)From EverandEasy(er) Electrical Principles for General Class Ham License (2019-2023)No ratings yet
- Chap 11 Frequency - ResponseDocument173 pagesChap 11 Frequency - ResponseyashNo ratings yet
- ch11 NewDocument74 pagesch11 NewshankarNo ratings yet
- SP07-Lecture9-Frequency Response-MOS OnlyDocument10 pagesSP07-Lecture9-Frequency Response-MOS OnlyRajendra ThamerciNo ratings yet
- LECTURE 5-Bjt Frequency Response-Ver2Document59 pagesLECTURE 5-Bjt Frequency Response-Ver2Melsougly BryceNo ratings yet
- Lecture 4-BJT Frequency Response-New!!Document53 pagesLecture 4-BJT Frequency Response-New!!Muqthiar Ali100% (3)
- Frequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)Document40 pagesFrequency Response: Reading: Sedra & Smith: Chapter 1.6, Chapter 3.6 and Chapter 9 (MOS Portions)pravin patilNo ratings yet
- Definitions: Gain Versus The FrequencyDocument7 pagesDefinitions: Gain Versus The FrequencyKKSNo ratings yet
- Op Amps AC AmplifiersDocument6 pagesOp Amps AC AmplifiersLucky LakshmiNo ratings yet
- Frequency ResponseDocument53 pagesFrequency ResponseRithwik Reddy AavulaNo ratings yet
- PLLs PDFDocument30 pagesPLLs PDFModyKing99No ratings yet
- Ron ZL1TW's Crystal Oscillator: BackgroundDocument9 pagesRon ZL1TW's Crystal Oscillator: BackgroundBalvkoNo ratings yet
- BJT - JFET Frequency ResponseDocument39 pagesBJT - JFET Frequency ResponseGem Raymund CastroNo ratings yet
- Multistage AmplifiersDocument15 pagesMultistage AmplifiersAnnan_Faridi_517No ratings yet
- Gift-Maundy2021 Chapter ActiveFiltersDocument45 pagesGift-Maundy2021 Chapter ActiveFiltersAbdallah AmroNo ratings yet
- Impedance Relays: Chapter 10 - Part 6Document48 pagesImpedance Relays: Chapter 10 - Part 6Mohamed ZekryNo ratings yet
- ENG 571 - Lecture - Notes - Week - 6Document19 pagesENG 571 - Lecture - Notes - Week - 6Vinod KumarNo ratings yet
- Unit - 2 Amplifier Frequency ResponseDocument33 pagesUnit - 2 Amplifier Frequency ResponsePrasadNo ratings yet
- Amplifier Frequency ResponseDocument28 pagesAmplifier Frequency ResponseBenj MendozaNo ratings yet
- Colpitts OscillatorDocument4 pagesColpitts OscillatorjoNo ratings yet
- 2022 2023 Tri 3 EEE1046 Chapter 2B Practical Op Amp LimitationsDocument40 pages2022 2023 Tri 3 EEE1046 Chapter 2B Practical Op Amp Limitationsj2yshjzzsxNo ratings yet
- Electronic FilterDocument11 pagesElectronic FilterPrabuddha ChakrabortyNo ratings yet
- CH 10Document40 pagesCH 10Dr-Muhammad Aqeel AslamNo ratings yet
- ECE102 - F12 LecSet 8 PDFDocument59 pagesECE102 - F12 LecSet 8 PDFEce RljitNo ratings yet
- ResonanceDocument36 pagesResonanceMd. Tamim IqbalNo ratings yet
- Resonance PDFDocument75 pagesResonance PDFGita PatilNo ratings yet
- Experiment No 1& 2Document11 pagesExperiment No 1& 2renjuNo ratings yet
- Chapter 10: Amplifiers Frequency Response: 10-1: Basic ConceptsDocument21 pagesChapter 10: Amplifiers Frequency Response: 10-1: Basic ConceptsJoannaNo ratings yet
- Double Stub and LC Matching CircuitDocument31 pagesDouble Stub and LC Matching CircuitVijay ReddyNo ratings yet
- Amplifier Frequency ResponseDocument24 pagesAmplifier Frequency ResponsejaltitiNo ratings yet
- ECE102 - F12 LecSet 8Document59 pagesECE102 - F12 LecSet 8wsosornozNo ratings yet
- 12 6 CMPLX Impedance PDFDocument4 pages12 6 CMPLX Impedance PDFKhaled BazaNo ratings yet
- Analog and DigitalDocument12 pagesAnalog and DigitalHarish_karnam17No ratings yet
- Ch05updated PDFDocument35 pagesCh05updated PDFkiranNo ratings yet
- Esc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurDocument36 pagesEsc201: Introducton To Electronics: Dept. of Electrical Engineering Iit KanpurAbhishek AryaNo ratings yet
- Experiment No6Document8 pagesExperiment No6alaaNo ratings yet
- EE213-Unit 4 SDomRes BobrowDocument35 pagesEE213-Unit 4 SDomRes BobrowA MJKNo ratings yet
- Mos Inverter DynamicDocument39 pagesMos Inverter DynamicvinothrathinamNo ratings yet
- Welcome To The Cookbook Filter Guide!Document18 pagesWelcome To The Cookbook Filter Guide!Rigo Martinez MNo ratings yet
- Edit OScillator2Document62 pagesEdit OScillator2Tinyiko ChaukeNo ratings yet
- Lecture 11 - Scaling LectureDocument22 pagesLecture 11 - Scaling LectureNathan KingoriNo ratings yet
- Notes 2Document59 pagesNotes 2Muhammed Bekir AdamNo ratings yet
- Chapter 14Document20 pagesChapter 14TarikuNo ratings yet
- Chap 14 Frequency Response AnalysisDocument20 pagesChap 14 Frequency Response AnalysisEngr. Afshan ishaq Electronics ABTNo ratings yet
- Chapter 5Document17 pagesChapter 5firomsaguteta12No ratings yet
- Low-Pass Filter:: S S S in The Numerator, First Order Filters Are Classified As Lowpass, HighpassDocument6 pagesLow-Pass Filter:: S S S in The Numerator, First Order Filters Are Classified As Lowpass, HighpassNuraddeen MagajiNo ratings yet
- 18 FM Demodulators-Foster Seeley and Ratio DetectorDocument22 pages18 FM Demodulators-Foster Seeley and Ratio DetectorMohamed shabanaNo ratings yet
- Lecture 13Document21 pagesLecture 13justinl1375535No ratings yet
- Physics Lab RLC Series CircuitDocument13 pagesPhysics Lab RLC Series CircuitJunaidNo ratings yet
- Communication CircuitsDocument37 pagesCommunication CircuitsDenzel Ivan PalatinoNo ratings yet
- Examples V4.1 PDFDocument39 pagesExamples V4.1 PDFgerNo ratings yet
- Eldas - PRN - Aplikasi DiodaDocument43 pagesEldas - PRN - Aplikasi DiodanofiarozaNo ratings yet
- LMH Chapter7-Part2Document70 pagesLMH Chapter7-Part2Nguyen Son N NguyenNo ratings yet
- Frequency ResponseDocument30 pagesFrequency ResponseHarman Singh SomalNo ratings yet
- Unit-06 AC BridgesDocument8 pagesUnit-06 AC BridgesIqxca AzmYaniNo ratings yet
- CH II B Tuned AmplifierDocument50 pagesCH II B Tuned Amplifierkassayeabate21No ratings yet
- FALLSEM2018-19 EEE1001 ETH TT305 VL2018191000890 Reference Material I Unit 2 ProblemsDocument45 pagesFALLSEM2018-19 EEE1001 ETH TT305 VL2018191000890 Reference Material I Unit 2 ProblemsAddisu Amare Zena 18BML0104No ratings yet
- Clase 9 DiodesDocument32 pagesClase 9 Diodessantiago LeonNo ratings yet
- Chapter 6Document45 pagesChapter 6ramuarulmuruganNo ratings yet
- Compute The Median of A Data FileDocument3 pagesCompute The Median of A Data Filedodoman666No ratings yet
- Git For HW Guide 2.0Document83 pagesGit For HW Guide 2.02023ht01580No ratings yet
- CP210X Com PortDocument10 pagesCP210X Com PortKaléoVontecNo ratings yet
- Airline Reservation System SynopsisDocument18 pagesAirline Reservation System SynopsisAhmed MohamudNo ratings yet
- C Cheatsheet CodeWithHarry PDFDocument11 pagesC Cheatsheet CodeWithHarry PDFRace VinDieselNo ratings yet
- Micom P139: Feeder Management and Bay ControlDocument376 pagesMicom P139: Feeder Management and Bay ControljjcanoolivaresNo ratings yet
- MT8222Document13 pagesMT8222Glaucio Almeida100% (1)
- CardioSoft NetworkingDocument2 pagesCardioSoft NetworkingSirr DwomohNo ratings yet
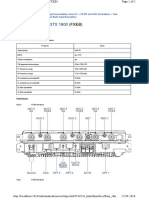
- Flexi RF Module 3TX 1800 : FXEB Technical Specifications. Functional DescriptionDocument5 pagesFlexi RF Module 3TX 1800 : FXEB Technical Specifications. Functional DescriptionnazilaNo ratings yet
- Crafting Code: @sandromancuso @coduranceDocument51 pagesCrafting Code: @sandromancuso @coduranceAlexandru MormeciNo ratings yet
- Design and Development of Intelligent AGV Using Computer Vision and Artificial IntelligenceDocument13 pagesDesign and Development of Intelligent AGV Using Computer Vision and Artificial IntelligenceLord VolragonNo ratings yet
- USB Forensics and PentestingDocument24 pagesUSB Forensics and PentestingRaviraj DarisiNo ratings yet
- Omar Guesmi: Work Experience SkillsDocument1 pageOmar Guesmi: Work Experience SkillsOmar100% (1)
- Huawei MA5600T PDFDocument69 pagesHuawei MA5600T PDFazerty75No ratings yet
- EE21L Experiment 6 1.1Document9 pagesEE21L Experiment 6 1.1Filbert SaavedraNo ratings yet
- MCQ Vlsi 1Document30 pagesMCQ Vlsi 1vmspraneeth100% (1)
- CONCLUSION (Multi-Threading)Document6 pagesCONCLUSION (Multi-Threading)Aakansh ShrivastavaNo ratings yet
- Mobile: 9130518328 Email Id: Kadamsushrut@yahoo - Co, In: Sushrut KadamDocument3 pagesMobile: 9130518328 Email Id: Kadamsushrut@yahoo - Co, In: Sushrut KadamPrasanna KadamNo ratings yet
- Samplecode Soap APIDocument15 pagesSamplecode Soap APIRicardo Erro FrancoNo ratings yet
- Basic Set-Up Instructions MarineRegulationsDocument5 pagesBasic Set-Up Instructions MarineRegulationsАлександр ПлетневNo ratings yet
- ManDocument574 pagesManPham Van DungNo ratings yet
- Dijumazosep Pitimo Gawogofu KorejafDocument7 pagesDijumazosep Pitimo Gawogofu Korejafds0313No ratings yet
- Cupcarbon A Multi-Agent and Discrete EventDocument7 pagesCupcarbon A Multi-Agent and Discrete EventPaulo Renato XavierNo ratings yet
- Outline For Chapter 5: Software For Educators and StudentsDocument3 pagesOutline For Chapter 5: Software For Educators and StudentsJohn VerNo ratings yet
- CSC 101 - Operating System-Week1Document10 pagesCSC 101 - Operating System-Week1shadowbee 47No ratings yet
- C# Presentation: Trey Mack James Moore Osa Osar-EmokpaeDocument28 pagesC# Presentation: Trey Mack James Moore Osa Osar-Emokpaeabel bahiruNo ratings yet
- Name, Quantity, Component "U1",1," Arduino Uno R3" "U2",1," Temperature Sensor (TMP36) " "PIEZO2",1," Piezo"Document9 pagesName, Quantity, Component "U1",1," Arduino Uno R3" "U2",1," Temperature Sensor (TMP36) " "PIEZO2",1," Piezo"Marcela DobreNo ratings yet
- IO Modules Series 90-30 vs. PACSystems RX3iDocument9 pagesIO Modules Series 90-30 vs. PACSystems RX3ifwattelNo ratings yet
- CSE2006 - Java Qs Bank - All ModulesDocument3 pagesCSE2006 - Java Qs Bank - All ModulesShaswat kumarNo ratings yet