You might also like
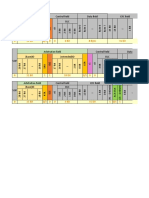
- 0 11 Bit 0/1 0 0 4 Bit 8 Byte 15 Bit: Arbitration Field Control Field Data Field CRC Field (Base) ID DLCDocument2 pages0 11 Bit 0/1 0 0 4 Bit 8 Byte 15 Bit: Arbitration Field Control Field Data Field CRC Field (Base) ID DLCPhùng Thế NamNo ratings yet
- SET-002EMLNE-FAN With Clock (EC Fan) - ModbusDocument1 pageSET-002EMLNE-FAN With Clock (EC Fan) - Modbusjimmylo3224No ratings yet
- SMP Gateway and Conitel RTUsDocument4 pagesSMP Gateway and Conitel RTUsmauricio neira vargasNo ratings yet
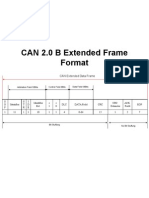
- CAN 20 B Extended Frame FormatDocument1 pageCAN 20 B Extended Frame Formatzero7599No ratings yet
- GB-4540 Rev1Document42 pagesGB-4540 Rev1Алексей ХоролецNo ratings yet
- Part 9Document66 pagesPart 9Venkat KrishnanNo ratings yet
- FD-X Series: IO-Link Instruction ManualDocument8 pagesFD-X Series: IO-Link Instruction ManualJenny Gonzalo MadrigalNo ratings yet
- FEX CheatSheet V1.00 PDFDocument1 pageFEX CheatSheet V1.00 PDFJuanMateoNo ratings yet
- FEX CheatSheet V1.00Document1 pageFEX CheatSheet V1.00kamarajk22No ratings yet
- Updated Summer 2012 Robert Boys V 4.0Document69 pagesUpdated Summer 2012 Robert Boys V 4.0enzzomolinariNo ratings yet
- CAN XL CompatibilityDocument8 pagesCAN XL CompatibilityBingbing LiNo ratings yet
- CPR04 Modbus Protocol 2v01Document21 pagesCPR04 Modbus Protocol 2v01ing.lunarNo ratings yet
- CAN TipsDocument45 pagesCAN TipsKenpachi ZarakiNo ratings yet
- 1 h50 - SannexesDocument142 pages1 h50 - SannexeshoseseoNo ratings yet
- 20180314Convolutional code高偉智Document9 pages20180314Convolutional code高偉智王韋棋No ratings yet
- 42.Milesight-Troubleshooting-Integration Between LPR Camera and NVR (VMS)Document12 pages42.Milesight-Troubleshooting-Integration Between LPR Camera and NVR (VMS)jesus sanchezNo ratings yet
- Overview of IEEE 802.3 and EthernetDocument16 pagesOverview of IEEE 802.3 and Ethernetpinakin4uNo ratings yet
- V5 EwsdDocument79 pagesV5 Ewsdneeraj kumar singh100% (3)
- Block DiagramDocument1 pageBlock DiagramLuis Alberto ArizaNo ratings yet
- Garmin G1000 HSDBDocument6 pagesGarmin G1000 HSDBohm3011No ratings yet
- BMS: Can Bus Communication SpecificationDocument3 pagesBMS: Can Bus Communication SpecificationrifaiNo ratings yet
- COM2 Setting For PLCDocument8 pagesCOM2 Setting For PLCMarko GavrilovicNo ratings yet
- Computer Networks: Bit and Byte StuffingDocument17 pagesComputer Networks: Bit and Byte StuffingPriya PackirisamyNo ratings yet
- Simplify CAN and LIN In-Vehicle Network Testing: Application NoteDocument16 pagesSimplify CAN and LIN In-Vehicle Network Testing: Application NoteskNo ratings yet
- Chapter2 CA Part2Document9 pagesChapter2 CA Part2Phan HuyNo ratings yet
- Shenzhen Feasycom Technology Co.,Ltd.: FSC-BT906Document27 pagesShenzhen Feasycom Technology Co.,Ltd.: FSC-BT906Juliano RettoreNo ratings yet
- Introduction To SDH NetworkDocument71 pagesIntroduction To SDH NetworkĐỗ Tuấn HàoNo ratings yet
- Voice Codingl 7 PDocument18 pagesVoice Codingl 7 Pmajidjerk1No ratings yet
- Shenzhen Feasycom Technology Co.,Ltd.: FSC-BT826Document19 pagesShenzhen Feasycom Technology Co.,Ltd.: FSC-BT826meiling wenNo ratings yet
- CAN ProtocolDocument48 pagesCAN Protocolrajitha suddalaNo ratings yet
- Experiment 1 UART and RS232C Standard: ObjectivesDocument8 pagesExperiment 1 UART and RS232C Standard: ObjectivesJay PatelNo ratings yet
- Data Encapsulatio N and Ipv4: Month - YearDocument35 pagesData Encapsulatio N and Ipv4: Month - YearCat SmithNo ratings yet
- Communication System Simulation IEEE 802.11a 式 告Document11 pagesCommunication System Simulation IEEE 802.11a 式 告王韋棋No ratings yet
- Griffe G4-PGN513 DiagramDocument16 pagesGriffe G4-PGN513 DiagramncirNo ratings yet
- Applications and Overview of Generic Framing Procedure (GFP)Document20 pagesApplications and Overview of Generic Framing Procedure (GFP)Hoàng MinhNo ratings yet
- Bluetooth TransmitterDocument1 pageBluetooth TransmitterwooshaokuiNo ratings yet
- LEAF CC 2 - 1 Vendor Reader Specification Rev A PDFDocument4 pagesLEAF CC 2 - 1 Vendor Reader Specification Rev A PDFAntonio GNo ratings yet
- Section 03-EthernetFunctionsDocument120 pagesSection 03-EthernetFunctionsGhanou BakiNo ratings yet
- FD-Q Series: IO-Link Instruction ManualDocument7 pagesFD-Q Series: IO-Link Instruction Manualairton07duduNo ratings yet
- Transitioning Applications From CAN 2.0 To CAN FDDocument8 pagesTransitioning Applications From CAN 2.0 To CAN FDdk contatoNo ratings yet
- Configuracion GetwayDocument1 pageConfiguracion Getwayramon03110No ratings yet
- Connection Admission Control For UMTS Transport (CAC) : Thomas Reim, Ingo WittkeDocument35 pagesConnection Admission Control For UMTS Transport (CAC) : Thomas Reim, Ingo WittkeAnonymous g8YR8b9No ratings yet
- XMT 8 Communication ProtocolDocument2 pagesXMT 8 Communication ProtocolBanovic MirkoNo ratings yet
- LX3V-2RS485-BD 1Document8 pagesLX3V-2RS485-BD 1Marko GavrilovicNo ratings yet
- TK5530Document8 pagesTK5530Triple PuzleNo ratings yet
- UFS OverviewDocument37 pagesUFS OverviewprabhanatrajNo ratings yet
- KT1025B Datasheet: Shenzhen Qingyue Electronics Co., LTDDocument12 pagesKT1025B Datasheet: Shenzhen Qingyue Electronics Co., LTDMaily SpamyNo ratings yet
- SR-650 EIP Explicit MSGDocument6 pagesSR-650 EIP Explicit MSGDes CastilloNo ratings yet
- Modbus fc2.0 Screw Piston - ENDocument10 pagesModbus fc2.0 Screw Piston - ENwzaglulNo ratings yet
- EN160: VLSI Project: Spring 2008Document20 pagesEN160: VLSI Project: Spring 2008Milan PatelNo ratings yet
- Adsp 21469Document72 pagesAdsp 21469nd_lngNo ratings yet
- Multiple Xing and T CarriersDocument10 pagesMultiple Xing and T CarriersJacob MbangNo ratings yet
- SDH Network ElementsDocument45 pagesSDH Network ElementsĐỗ Tuấn HàoNo ratings yet
- How To Patch DSDT For Working Battery StatusDocument14 pagesHow To Patch DSDT For Working Battery StatusElectro RoseNo ratings yet
- K L Transmitter Shell Using PIC12F6XX: EE OQ ®Document30 pagesK L Transmitter Shell Using PIC12F6XX: EE OQ ®ognarfNo ratings yet
- OPs 2 1Document1 pageOPs 2 1Walter GerhartNo ratings yet
- ME631 Modbus RTU Communication Protocol V3.4.181101 enDocument19 pagesME631 Modbus RTU Communication Protocol V3.4.181101 enTimothy John MoraNo ratings yet
- Message Authentication For Can Bus and Autosar Software ArchitectureDocument135 pagesMessage Authentication For Can Bus and Autosar Software ArchitecturebitzabladeNo ratings yet
- Diesel QSC8.3 GEM DisplayDocument48 pagesDiesel QSC8.3 GEM Displayedwin100% (4)
- E531827 00E CAN FieldbusDocument46 pagesE531827 00E CAN Fieldbusarcangel_picNo ratings yet
- Maserati M145 TPMS Functional Specification - V1 - 04Document7 pagesMaserati M145 TPMS Functional Specification - V1 - 04aiigeeNo ratings yet
- C125 User ManualDocument93 pagesC125 User ManualAshish BatraNo ratings yet
- Welcome To Industrial Training Institute: Controller Area NetworkDocument47 pagesWelcome To Industrial Training Institute: Controller Area NetworkNiza Jamil100% (1)
- PVED-CLS Controller For Electrohydraulic Steering User ManualDocument181 pagesPVED-CLS Controller For Electrohydraulic Steering User ManualRafael LeandroNo ratings yet
- Red Can MahindraDocument139 pagesRed Can MahindraJonathan RojasNo ratings yet
- Docklight ManualDocument44 pagesDocklight ManualsanthoshNo ratings yet
- Essenza Pat HandDocument56 pagesEssenza Pat Handwilton alves da silvaNo ratings yet
- Introduction To In-Vehicle NetworkingDocument21 pagesIntroduction To In-Vehicle NetworkingryandaprakosoNo ratings yet
- Canking - Can Simulation Software: EX. NO.1.B 02-07-2019Document6 pagesCanking - Can Simulation Software: EX. NO.1.B 02-07-2019ERTS 2k19-21No ratings yet
- CAN Protocol HV1 310321Document3 pagesCAN Protocol HV1 310321e_vendrellNo ratings yet
- Still OM Pimespo Forklift Display Elements Workshop ManualDocument80 pagesStill OM Pimespo Forklift Display Elements Workshop ManualBenedito José dos santos FerreiraNo ratings yet
- Beginner's Guide To CAN Development: 2008-08-14 Application Note AN-AND-1-102Document5 pagesBeginner's Guide To CAN Development: 2008-08-14 Application Note AN-AND-1-102Venkat RaoNo ratings yet
- FSG Angular Position Transducers EDocument11 pagesFSG Angular Position Transducers ERachid SmailiNo ratings yet
- 4305 Operator Unit 130-626Document97 pages4305 Operator Unit 130-626JUNGPHNo ratings yet
- Curtis 1232Document4 pagesCurtis 1232pyatin07No ratings yet
- Code NoDocument4 pagesCode NoMarlon D. VirtucioNo ratings yet
- Navigation Controller Fault Table: Fault Description Recommended ActionDocument8 pagesNavigation Controller Fault Table: Fault Description Recommended Actionniaou gatoulaNo ratings yet
- Digsy Compact Control System For Mobile ApplicationsDocument8 pagesDigsy Compact Control System For Mobile ApplicationsAbdallah MiidouneNo ratings yet
- Vibrocontrol 1500: Operating InstructionsDocument12 pagesVibrocontrol 1500: Operating InstructionsBudhi Prasetya HakimNo ratings yet
- Electrical SystemsDocument2 pagesElectrical SystemsMārcis RancānsNo ratings yet
- Comap SupportDocument254 pagesComap Supportmanuel segoviaNo ratings yet
- KATO Settings ExampleDocument11 pagesKATO Settings ExampleEn FaizulNo ratings yet
- 05 SAM ChassisDocument26 pages05 SAM ChassisEbied Yousif AlyNo ratings yet
- Devicenet Cm059 (Si-N1) Option Technical ManualDocument70 pagesDevicenet Cm059 (Si-N1) Option Technical ManualKrishna KrishNo ratings yet
- Power Distribution Module 30Document3 pagesPower Distribution Module 30MARIPANo ratings yet
- Cascadia PDFDocument143 pagesCascadia PDFDavid Soto Castillo67% (3)
- Stand-Alone CAN Controller With SPI Interface: Features: DescriptionDocument92 pagesStand-Alone CAN Controller With SPI Interface: Features: DescriptionCsaba VáradiNo ratings yet