You might also like
- Dynamic Torque Control of A Hydraulic Quadruped RobotDocument6 pagesDynamic Torque Control of A Hydraulic Quadruped RobotPrathamesh SarafNo ratings yet
- Development of A Lightweight On-Board Hydraulic System For A Quadruped RobotDocument11 pagesDevelopment of A Lightweight On-Board Hydraulic System For A Quadruped RobotTHE ULTIMATENo ratings yet
- A Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceDocument21 pagesA Survey of Bio-Inspired Compliant Legged Robot Designs: Home Search Collections Journals About Contact Us My IopscienceRovi Andra PradivaNo ratings yet
- A A Q F R: N Utonomous Uadrotor Lying ObotDocument44 pagesA A Q F R: N Utonomous Uadrotor Lying ObotAjay ParameswarNo ratings yet
- Tmech Manipulator Survey AcceptedDocument12 pagesTmech Manipulator Survey AcceptedBell RicckyNo ratings yet
- Applied SciencesDocument20 pagesApplied SciencesSalih ÜnalNo ratings yet
- Braided Pneumatic Muscle Actuators: Darwin G. Caldweu, A. Razak and M. GoodwinDocument6 pagesBraided Pneumatic Muscle Actuators: Darwin G. Caldweu, A. Razak and M. GoodwinNhật MinhNo ratings yet
- MIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionDocument8 pagesMIT Super Mini Cheetah Robot: Small, Low-Cost Quadruped for Dynamic LocomotionCuenta De RespaldoNo ratings yet
- Primary Design: Statement of The ProblemDocument9 pagesPrimary Design: Statement of The ProblemHimanshu SinhaNo ratings yet
- Control of A High Performance Bipedal Robot Using Viscoelastic Liquid Cooled ActuatorsDocument8 pagesControl of A High Performance Bipedal Robot Using Viscoelastic Liquid Cooled ActuatorsLuis SentisNo ratings yet
- 31 08 2020 Optimized Foothold Planning and Posture Searching ForDocument7 pages31 08 2020 Optimized Foothold Planning and Posture Searching ForANSHUMAAN P BHAGATNo ratings yet
- Force Control For Electro-Hydraulic Servo Actuator Used For A Humanoid Robotic ArmDocument10 pagesForce Control For Electro-Hydraulic Servo Actuator Used For A Humanoid Robotic ArmAbdurrezaghNo ratings yet
- Design and Fabrication of A Remote ContrDocument14 pagesDesign and Fabrication of A Remote ContrAbdulkarim Odeh MuhammadNo ratings yet
- Project Segway 3 WheelDocument26 pagesProject Segway 3 WheelMohit ChetwaniNo ratings yet
- Quasi-Direct Drive Actuation For A Lightweight Hip Exoskeleton With High Backdrivability and High BandwidthDocument9 pagesQuasi-Direct Drive Actuation For A Lightweight Hip Exoskeleton With High Backdrivability and High Bandwidth李磊No ratings yet
- Huang 2016Document6 pagesHuang 2016kurts010No ratings yet
- Machines 10 00632 v2Document17 pagesMachines 10 00632 v2Woodrow FoxNo ratings yet
- Jumping XivDocument10 pagesJumping XivNikmah MhNo ratings yet
- CF17 Blimp ShortDocument12 pagesCF17 Blimp ShortPrescoe LungreeNo ratings yet
- Robotics PDFDocument18 pagesRobotics PDFGyan KirtiNo ratings yet
- AUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeDocument4 pagesAUV Design Intelligent Vehicle Using Sensor Fusion Control SchemeSachin SharmaNo ratings yet
- Robots Step Outside: September 2005Document5 pagesRobots Step Outside: September 2005Ấm LeeNo ratings yet
- (2006) - A Cockroach Inspired Robot With Artificial Muscles PDFDocument6 pages(2006) - A Cockroach Inspired Robot With Artificial Muscles PDFJhonny Alexander Valdés CorreaNo ratings yet
- Micromachines 13 01404 v2Document20 pagesMicromachines 13 01404 v2technologie collegeNo ratings yet
- كرسي متسلق السلالمDocument6 pagesكرسي متسلق السلالمAhmed ShoeebNo ratings yet
- Mooring Chain Climbing Robot For NDT Inspection ApplicationsDocument9 pagesMooring Chain Climbing Robot For NDT Inspection ApplicationsSoledad AceitunoNo ratings yet
- Classifying Robots by Power SourceDocument8 pagesClassifying Robots by Power SourceSam ShekhawatNo ratings yet
- 2 9 1624687673 1ijietdec20211Document10 pages2 9 1624687673 1ijietdec20211TJPRC PublicationsNo ratings yet
- 2005 AMAM BigDogDocument5 pages2005 AMAM BigDogDiriba AbdiNo ratings yet
- Carney (2021)Document12 pagesCarney (2021)Fernanda LealNo ratings yet
- Efficient and Versatile Locomotion With Highly Compliant LegsDocument3 pagesEfficient and Versatile Locomotion With Highly Compliant LegsNisrina Safira SariNo ratings yet
- Project 1Document28 pagesProject 1Srikanth StarkNo ratings yet
- Dynamic of Two Wheeled RobotDocument35 pagesDynamic of Two Wheeled RobotMartino Ojwok AjangnayNo ratings yet
- Stickman Towards A Human Scale Acrobatic Robot PaperDocument7 pagesStickman Towards A Human Scale Acrobatic Robot PaperstevecraigNo ratings yet
- Power Hydraulics - Switched Mode Control of Hydraulic ActuationDocument7 pagesPower Hydraulics - Switched Mode Control of Hydraulic ActuationThiệu Đặng VănNo ratings yet
- Modelling and Control of A Quad RotorDocument26 pagesModelling and Control of A Quad Rotorshayant nandiNo ratings yet
- A Control Method To Suppress The Swing Vibration of A Hybrid Excavator Using Sliding Mode ApproachDocument17 pagesA Control Method To Suppress The Swing Vibration of A Hybrid Excavator Using Sliding Mode ApproachJackson PhinniNo ratings yet
- Paper ID276 Ahs71 Final 2Document31 pagesPaper ID276 Ahs71 Final 2Sophia Petrea NogueiraNo ratings yet
- Modeling of Robotic Fish Propelled by A Servo/IPMC Hybrid TailDocument6 pagesModeling of Robotic Fish Propelled by A Servo/IPMC Hybrid TailAndree CrNo ratings yet
- Mechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorDocument12 pagesMechatronics: Haoyong Yu, Sunan Huang, Gong Chen, Nitish ThakorebrahimpanNo ratings yet
- A composite algorithm for flow rate reduction and stable body trajectory generation in a hydraulic actuated quadruped robot with kinematic redundancyDocument6 pagesA composite algorithm for flow rate reduction and stable body trajectory generation in a hydraulic actuated quadruped robot with kinematic redundancyroboticanvidia42No ratings yet
- An ITER Relevant Robot for Remote HandlingDocument17 pagesAn ITER Relevant Robot for Remote HandlingmilanpkNo ratings yet
- Review of Quadruped Robots For Dynamic Locomotion: Qiayuan LiaoDocument7 pagesReview of Quadruped Robots For Dynamic Locomotion: Qiayuan LiaoМатвей КузнецовNo ratings yet
- I07SN 02hadanoDocument7 pagesI07SN 02hadanocesarNo ratings yet
- High Performance Swing Velocity Tracking Control of Hydraulic ExcavatorsDocument6 pagesHigh Performance Swing Velocity Tracking Control of Hydraulic ExcavatorsJack SonNo ratings yet
- 17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)Document11 pages17 - Adaptive Control of Inertially Actuated Bouncing Robot (Important!)jowdiverNo ratings yet
- Jjmie: Fuzzy Logic Control of An Electrical Traction ElevatorDocument10 pagesJjmie: Fuzzy Logic Control of An Electrical Traction Elevatorsudeep kumarNo ratings yet
- Amphibious Robot II PDFDocument6 pagesAmphibious Robot II PDFAman TripathiNo ratings yet
- 25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsDocument7 pages25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsMEMONCHAS NEMOZNo ratings yet
- Modelling and control of a large quadrotor robotDocument9 pagesModelling and control of a large quadrotor robotKhalil HsaineNo ratings yet
- A Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGDocument8 pagesA Low-Cost Compliant 7-DOF Robotic Manipulator: Morgan Quigley, Alan Asbeck, and Andrew Y. NGsigmateNo ratings yet
- Kinematics Synthesis of A New Generation of RapidDocument30 pagesKinematics Synthesis of A New Generation of RapidNada GhammemNo ratings yet
- Linear Actuators Report EnglishDocument8 pagesLinear Actuators Report EnglishAjimKe'enNo ratings yet
- Design, Development and Operational of An Ornithopter: April 2020Document8 pagesDesign, Development and Operational of An Ornithopter: April 2020yogesh yogeNo ratings yet
- Differential-Drive In-Pipe Robot For Moving Inside Urban Gas PipelinesDocument17 pagesDifferential-Drive In-Pipe Robot For Moving Inside Urban Gas PipelinesAmino fileNo ratings yet
- MainDocument8 pagesMainShubham KumarNo ratings yet
- VMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationDocument16 pagesVMKV Engineering College, Salem Aeronautical Engineering Course Elective - Robotics Engineering - Question Bank 2012 RegulationGaurav MullickNo ratings yet
- Electric Motor in Ship PropulsionDocument13 pagesElectric Motor in Ship PropulsionConcept of ReasoningNo ratings yet
- Bilateral_Drive_GearA_Highly_Backdrivable_Reduction_Gearbox_for_Robotic_ActuatorsDocument13 pagesBilateral_Drive_GearA_Highly_Backdrivable_Reduction_Gearbox_for_Robotic_ActuatorsSerdar FildisNo ratings yet
- Check Out Our List of Young Businesspeople Who Became Successful Before They Could Drive A Car!Document3 pagesCheck Out Our List of Young Businesspeople Who Became Successful Before They Could Drive A Car!Samir david MahechaNo ratings yet
- Is Artificial Intelligence Worth The RiskDocument10 pagesIs Artificial Intelligence Worth The Riskapi-565804286No ratings yet
- Mec402:Industrial Automation and Robotics: Session 2021-22 Page:1/1Document1 pageMec402:Industrial Automation and Robotics: Session 2021-22 Page:1/1Deepak GuptaNo ratings yet
- Automatic Bag Palletizers: Robotic Versus Conventional: Chantland MHSDocument5 pagesAutomatic Bag Palletizers: Robotic Versus Conventional: Chantland MHSKien Nguyen TrungNo ratings yet
- ErDocument1 pageErmyanmar lover tamuNo ratings yet
- "Agri-Bot With Multiple Functions For Agriculture Support": Presented byDocument19 pages"Agri-Bot With Multiple Functions For Agriculture Support": Presented byManoj Kumar Vc ManuNo ratings yet
- Single Axis Robot - (E)Document259 pagesSingle Axis Robot - (E)Nimrod XxvNo ratings yet
- Robotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Document14 pagesRobotics: Faculty of Engineering Computer Engineering Department Subject: Robotics / Grade 4Aalaa HasanNo ratings yet
- Mir500 BrochureDocument2 pagesMir500 BrochureS NguyenNo ratings yet
- Written By: Bianca Catherina A. Quijada: REFLECTION PAPER: Bicentennial ManDocument1 pageWritten By: Bianca Catherina A. Quijada: REFLECTION PAPER: Bicentennial ManBianca BiancaNo ratings yet
- 5G, Smart Dust and the Technological Possession of MankindDocument10 pages5G, Smart Dust and the Technological Possession of MankindAdrian BoboceaNo ratings yet
- ASD Cyber Security and Robotics Work Experience Program Assessment CriteriaDocument2 pagesASD Cyber Security and Robotics Work Experience Program Assessment CriteriasonyNo ratings yet
- Sensors For Robotics 2023 2043 Technologies, Markets, and ForecastsDocument23 pagesSensors For Robotics 2023 2043 Technologies, Markets, and ForecastsÇağatay GümüşNo ratings yet
- Luke Shopping ListDocument5 pagesLuke Shopping Listapi-687578733No ratings yet
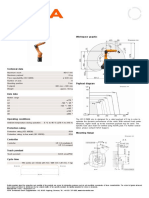
- KUKA KR R900 Sixx-2020 PDFDocument1 pageKUKA KR R900 Sixx-2020 PDFDany Caballero ArnezNo ratings yet
- robot_localization Package Guide for State Estimation and Sensor FusionDocument18 pagesrobot_localization Package Guide for State Estimation and Sensor FusionCoffee ĐenNo ratings yet
- Seminar ON (Snake Robot) : Biomimetic RobotsDocument16 pagesSeminar ON (Snake Robot) : Biomimetic RobotsJitendra SarojNo ratings yet
- Snake Robotics: by Rohit Raichura SowmyaDocument22 pagesSnake Robotics: by Rohit Raichura SowmyaRohit RaichuraNo ratings yet
- Obstacle Avoidance Robot Using Ultrasonic SensorsDocument5 pagesObstacle Avoidance Robot Using Ultrasonic SensorskentNo ratings yet
- Biomedical Applications of Soft RoboticsDocument11 pagesBiomedical Applications of Soft RoboticsAbdul Rehman100% (2)
- AMP Microproject CoDocument23 pagesAMP Microproject CovvppolycoNo ratings yet
- Artificial Intelligence &robboticsDocument21 pagesArtificial Intelligence &robboticsNageeta BaiNo ratings yet
- Chapter 1 Solution of RoboticsDocument4 pagesChapter 1 Solution of RoboticsEngr ShabirNo ratings yet
- Letter of Recommendatin - Jackson EggerdDocument1 pageLetter of Recommendatin - Jackson Eggerdapi-525937903No ratings yet
- AICTE Training & Learning Academy FDP on Robotics and Artificial IntelligenceDocument2 pagesAICTE Training & Learning Academy FDP on Robotics and Artificial Intelligencesultan1786No ratings yet
- Hari Kumar V-NIT-W-ProfileDocument2 pagesHari Kumar V-NIT-W-ProfileMadhusudhan DNo ratings yet
- Table of ContentsDocument5 pagesTable of Contentstefflon trolegdyNo ratings yet
- VEX LRT Game Manual 12012020Document49 pagesVEX LRT Game Manual 12012020林書弘Henry LinNo ratings yet
- Robotic Arm Add-On Pack For Starter Robot KitDocument14 pagesRobotic Arm Add-On Pack For Starter Robot KitBirane MbengueNo ratings yet
- The Uses of RobotsDocument9 pagesThe Uses of RobotsBumbacloutNo ratings yet