You might also like
- Unirail Technical Datasheet PackDocument36 pagesUnirail Technical Datasheet PackJohn Jairo CamachoNo ratings yet
- Seafastening ExcelDocument13 pagesSeafastening ExcelRiyan EsapermanaNo ratings yet
- Pile Cap DesignDocument9 pagesPile Cap DesignSayantan Paul100% (1)
- Reverse L Shaped Cantilever RETAINING WALLDocument8 pagesReverse L Shaped Cantilever RETAINING WALLppsivan0% (1)
- Thermodynamics and Material Engineering Laboratory: Group MembersDocument29 pagesThermodynamics and Material Engineering Laboratory: Group Members苏明慧100% (2)
- Java Chess ProgrammDocument25 pagesJava Chess ProgrammShaheer AliNo ratings yet
- Mit2 019S11 SK1Document15 pagesMit2 019S11 SK1Hasib Ul Haque AmitNo ratings yet
- Class II Methodology For Drag EstimationDocument80 pagesClass II Methodology For Drag EstimationBrian XistosNo ratings yet
- SeaKeeping MITDocument55 pagesSeaKeeping MITTramyer MactavishNo ratings yet
- Module IV Vibration EngineeringDocument14 pagesModule IV Vibration Engineeringzyx xyzNo ratings yet
- AE581 Project ReportDocument14 pagesAE581 Project ReportKağan İpekNo ratings yet
- Foundation f-2 (Footing)Document2 pagesFoundation f-2 (Footing)CECON STRUCTURALNo ratings yet
- Chapter 12Document30 pagesChapter 12elias hayelomNo ratings yet
- D A M 03 Crankshaft Designt-04Document49 pagesD A M 03 Crankshaft Designt-04Twite_Daniel2No ratings yet
- All Pile Gil1Document2 pagesAll Pile Gil1Abdul AzizNo ratings yet
- Mechanics of Solid PDFDocument100 pagesMechanics of Solid PDFasgharNo ratings yet
- Adverse Weather Ship HandlingDocument58 pagesAdverse Weather Ship Handlingdraconic90No ratings yet
- Cargo Calculator Formulas - ENDocument14 pagesCargo Calculator Formulas - ENDaniel Vargas RibeiroNo ratings yet
- Topic 2-1 Slope - StabilityDocument23 pagesTopic 2-1 Slope - Stability彭宇鑫No ratings yet
- WoPhO 2012 Q2Document3 pagesWoPhO 2012 Q2Mohammed AlsawafiNo ratings yet
- Contoh PdaDocument48 pagesContoh PdaMS TazakkaNo ratings yet
- Godard - 2009 - CSA Report - Mathematical Model - Spacecraft Attitude StabilizationDocument10 pagesGodard - 2009 - CSA Report - Mathematical Model - Spacecraft Attitude StabilizationManoj Saralaya100% (1)
- Physics TextbookDocument544 pagesPhysics TextbookHannah Coker100% (1)
- Basic4 Mechanical VibrationsDocument4 pagesBasic4 Mechanical VibrationsjeisonNo ratings yet
- Examining An Entire Aircraft: 1 Adding A FuselageDocument5 pagesExamining An Entire Aircraft: 1 Adding A FuselageIrfan KhanNo ratings yet
- Lecture - 08 Shaft IDocument23 pagesLecture - 08 Shaft Iwkho0007No ratings yet
- Foundation Calculation Sheet: Title DescriptionDocument10 pagesFoundation Calculation Sheet: Title DescriptionrobianggaNo ratings yet
- Warping+Bernoulli Beam ModelDocument6 pagesWarping+Bernoulli Beam ModelTomás Bravo TetlakNo ratings yet
- Retaining Wall DesignDocument8 pagesRetaining Wall DesignmilindjdNo ratings yet
- AFM - 10,12 NovDocument12 pagesAFM - 10,12 Novswetapriya97No ratings yet
- GyrascopeDocument88 pagesGyrascopeசெல்வ குமார்100% (2)
- Y A Pitch L R: Vehicle Inertial MeasurementsDocument5 pagesY A Pitch L R: Vehicle Inertial MeasurementsEducation formeNo ratings yet
- Bending MomentDocument30 pagesBending MomentMuhammad ImranNo ratings yet
- Lecture 25 - Frames and Ribs Strength AnalysisDocument7 pagesLecture 25 - Frames and Ribs Strength AnalysisJony Oliver Lazo RamosNo ratings yet
- Assssssssssssssssssss: N Tan (45° + Ø 2) e N (N 1) Cot Ø N (N 1) Tan 1.4Ø ɤDocument1 pageAssssssssssssssssssss: N Tan (45° + Ø 2) e N (N 1) Cot Ø N (N 1) Tan 1.4Ø ɤclark esteven m. salvador100% (1)
- RocketDocument19 pagesRocketTofik KemalNo ratings yet
- 1.BM & SF PDFDocument11 pages1.BM & SF PDFsutrimoNo ratings yet
- Kinematics Jee Advanced ArchiveDocument5 pagesKinematics Jee Advanced ArchiveIshu FuliyaNo ratings yet
- 3 Mathematical Models of SystemsDocument35 pages3 Mathematical Models of SystemsDawa PenjorNo ratings yet
- Runway Beam OkDocument8 pagesRunway Beam OkNguyễnTúSơnNo ratings yet
- 19EI5DCLCS - Lec 3 - TF of Mechanical SystemsDocument66 pages19EI5DCLCS - Lec 3 - TF of Mechanical Systemskrushnasamy subramaniyanNo ratings yet
- Designof Slabsusing Shear Friction BirkleetalDocument11 pagesDesignof Slabsusing Shear Friction BirkleetalDavide GiannuzziNo ratings yet
- Chapter 6 BendingDocument31 pagesChapter 6 Bendingcaps lockNo ratings yet
- Acdyn202225 2.RotationalDynamicsDocument26 pagesAcdyn202225 2.RotationalDynamicsDavid SchmidtNo ratings yet
- Calculation Design Beam Jib CraneDocument25 pagesCalculation Design Beam Jib CraneAyena BrianNo ratings yet
- Topic1 StaticDocument29 pagesTopic1 StaticMohamad Muslihuddin RazaliNo ratings yet
- EmbankementDocument5 pagesEmbankementthakuramit47248No ratings yet
- SEA - TRANS - REACTION PAU-106-104B - Preliminary IssueDocument4 pagesSEA - TRANS - REACTION PAU-106-104B - Preliminary IssueUMER AZIQNo ratings yet
- The Conditions When These Expressions Are ValidDocument6 pagesThe Conditions When These Expressions Are ValidSandro SouzaNo ratings yet
- Kang 2019Document14 pagesKang 2019vinay sathenaNo ratings yet
- Prokon - CF1 For Column 450x450Document5 pagesProkon - CF1 For Column 450x450archetype designNo ratings yet
- Materials ResistanceDocument31 pagesMaterials ResistanceOmar AlzoubiNo ratings yet
- Drag Computation Over A Cylinder - NotesDocument5 pagesDrag Computation Over A Cylinder - NotesEnrique G Mancheno MendezNo ratings yet
- IP - AE-FUZ-COMENZI+ (Ap-My17) - T I (PRN II (16.05) - !Document12 pagesIP - AE-FUZ-COMENZI+ (Ap-My17) - T I (PRN II (16.05) - !Iancu ParaschivNo ratings yet
- 006 Lec. 6 Stress Analysis (ME 276)Document42 pages006 Lec. 6 Stress Analysis (ME 276)IslamNo ratings yet
- Plastic Deformation in Single and Polycrystalline Materials: MSE205:Mechanical Behavior of Materials Pradipta GhoshDocument18 pagesPlastic Deformation in Single and Polycrystalline Materials: MSE205:Mechanical Behavior of Materials Pradipta Ghoshabhishek.kumarNo ratings yet
- Libro 1Document6 pagesLibro 1Mario ManzanoNo ratings yet
- C7 - Column CalculationDocument15 pagesC7 - Column CalculationRandy ViolaNo ratings yet
- Lifting Cargoes With An A-Symmetrical CoGDocument7 pagesLifting Cargoes With An A-Symmetrical CoGRaja GopalNo ratings yet
- Torsion Including Warping of Open SectionsDocument6 pagesTorsion Including Warping of Open SectionsahmedanyNo ratings yet
- Allowable Safe Bearing CapacityDocument1 pageAllowable Safe Bearing CapacityKiang SeongNo ratings yet
- Planing in Extreme Conditions - Blount, Funkhouser 2009Document14 pagesPlaning in Extreme Conditions - Blount, Funkhouser 2009haujesNo ratings yet
- RANSE Simulations of Surface Piercing PropellersDocument5 pagesRANSE Simulations of Surface Piercing PropellershaujesNo ratings yet
- Design and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004Document11 pagesDesign and Test of Lightweight Sandwich T-Joint For Naval Ships - Toftegaard, Lystrup 2004haujesNo ratings yet
- $tsu. (:'T ": (: Uu TorDocument23 pages$tsu. (:'T ": (: Uu TorhaujesNo ratings yet
- Wave Impact Reduction of Planing BoatsDocument14 pagesWave Impact Reduction of Planing BoatshaujesNo ratings yet
- Comments On Reliable Prediction Accuracy: A Hydrocomp Technical ReportDocument4 pagesComments On Reliable Prediction Accuracy: A Hydrocomp Technical ReporthaujesNo ratings yet
- Dynamic Analysis of Planing Hulls in The Vertical Plane - AkersDocument19 pagesDynamic Analysis of Planing Hulls in The Vertical Plane - AkershaujesNo ratings yet
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- Estimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReportDocument2 pagesEstimating Propeller Forces For Blade Strength Analysis: A Hydrocomp Technical ReporthaujesNo ratings yet
- AsdmechanicaldesignDocument5 pagesAsdmechanicaldesignhaujesNo ratings yet
- How To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofDocument4 pagesHow To Build An Optimist: How Hard Can It Be, There's Only Five Bits ofhaujes0% (1)
- Characteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000Document11 pagesCharacteristics of Hydrodynamic Derivatives in Maneuvering Equations For Super High-Speed Planing Hulls - Ikeda, Katayama, Okumura 2000haujesNo ratings yet
- NASP Origin and Cause, Appraisals On Boat Losses - Davis 2003Document21 pagesNASP Origin and Cause, Appraisals On Boat Losses - Davis 2003haujesNo ratings yet
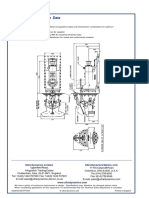
- Ultrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedDocument2 pagesUltrajet 376 Installation Data: Ultra Dynamics Marine, LCC Ultra Dynamics LimitedhaujesNo ratings yet
- Ultrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZDocument2 pagesUltrajet 251 Features & Benefi Ts Description: Z Z Z Higher Inspection Cover To Z Z Z Z ZhaujesNo ratings yet
- Preliminary Jet Size SelectionDocument3 pagesPreliminary Jet Size SelectionhaujesNo ratings yet
- Fi 225Document8 pagesFi 225procer1234No ratings yet
- 22LB450 PDFDocument34 pages22LB450 PDFAriq ENngakpoenyahobbieNo ratings yet
- 03MA BiopharmsumDocument8 pages03MA BiopharmsumApoloTrevinoNo ratings yet
- AlucoMass Profile UpdateDocument4 pagesAlucoMass Profile UpdateWajira FernandoNo ratings yet
- The Crystal PalaceDocument15 pagesThe Crystal PalaceAshwini Anand100% (2)
- Hilti Catalogue 2014 LAT AnchorsDocument29 pagesHilti Catalogue 2014 LAT AnchorsTom WinterNo ratings yet
- Teradata SQL Quick Reference Guide: Simplicity by Design, Second EditionDocument3 pagesTeradata SQL Quick Reference Guide: Simplicity by Design, Second EditiondharmendardNo ratings yet
- Public VersionDocument170 pagesPublic Versionvalber8No ratings yet
- Myntdu Leshka HE March2012Document13 pagesMyntdu Leshka HE March2012madhueeNo ratings yet
- Uniform Tire Quality Grading: Consumer Guide ToDocument172 pagesUniform Tire Quality Grading: Consumer Guide ToSergio BedoyaNo ratings yet
- Model Exam - 1 Cs6303 CA - 19.02.18 Answer KeyDocument8 pagesModel Exam - 1 Cs6303 CA - 19.02.18 Answer KeyJaga DeeshNo ratings yet
- CW & CCW CW CCW (Normal) Mod. 1 Mod. 2Document2 pagesCW & CCW CW CCW (Normal) Mod. 1 Mod. 2mukeshkumarjNo ratings yet
- Pronto Edit Professional HelpDocument121 pagesPronto Edit Professional HelpmrbssNo ratings yet
- AMIGA - Boulder Dash Construction Kit InstructionsDocument3 pagesAMIGA - Boulder Dash Construction Kit InstructionsjajagaborNo ratings yet
- Open SCADDocument94 pagesOpen SCADNatàlia Parés VivesNo ratings yet
- EP516 - Record Machinery Breakdown MARCH 2023Document1 pageEP516 - Record Machinery Breakdown MARCH 2023econpile ep525No ratings yet
- Teorema Thevenin Dan NortonDocument24 pagesTeorema Thevenin Dan NortonIkki Purnama100% (1)
- Safety Data Sheet: According To EC Directive 91/155/EECDocument5 pagesSafety Data Sheet: According To EC Directive 91/155/EECSiti HannaNo ratings yet
- BAILINGA-E99 GSM Alarm System User ManualDocument33 pagesBAILINGA-E99 GSM Alarm System User ManualAbdullahov OčeNo ratings yet
- SSP 298 Touareg ElectricsDocument31 pagesSSP 298 Touareg Electricsภูเก็ต เป็นเกาะ100% (3)
- WDP 3aDocument2 pagesWDP 3aRUDHRESH KUMAR SNo ratings yet
- 10 1016@j Jclepro 2015 10 096Document14 pages10 1016@j Jclepro 2015 10 096Vina Too VinotNo ratings yet
- Pipelay Procedure RevisedDocument31 pagesPipelay Procedure Revisedcbsd24100% (1)
- SLR Metaliks Limited: Motor Greasing ScheduleDocument3 pagesSLR Metaliks Limited: Motor Greasing ScheduleprasadNo ratings yet
- Induction Training of WorkersDocument21 pagesInduction Training of WorkersAamir ShamasNo ratings yet
- Autotherm - AAC Plant Project Report - SimpleDocument9 pagesAutotherm - AAC Plant Project Report - SimpleAutotherm Equipments CorporationNo ratings yet
- Information Sheet 1Document4 pagesInformation Sheet 1KèlǐsītǎnKǎPáng0% (1)