You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Principles of Differential RelayingDocument115 pagesPrinciples of Differential RelayingelitesankarNo ratings yet
- Differential ProtectionDocument25 pagesDifferential ProtectionAkinbode Sunday Oluwagbenga100% (5)
- Linear or LDO Regulators & Step-Down Switching RegulatorsDocument2 pagesLinear or LDO Regulators & Step-Down Switching Regulatorskasim leeNo ratings yet
- What Is Load Pull Analysis For Power Amplifiers and How Is It Done?Document6 pagesWhat Is Load Pull Analysis For Power Amplifiers and How Is It Done?nick furyNo ratings yet
- Material Controller ProcedureDocument10 pagesMaterial Controller ProcedureAmos FiestaNo ratings yet
- RCFA Report Template For Mechanical Equipment PDFDocument11 pagesRCFA Report Template For Mechanical Equipment PDFAnonymous hbl0ek0qdZNo ratings yet
- 14 - Notes - Power Quality PartII - Harmonic Filters PDFDocument18 pages14 - Notes - Power Quality PartII - Harmonic Filters PDFWillam Metz100% (1)
- Chapter 6Document88 pagesChapter 6Ashraf Yusof100% (2)
- Lego4scrum SampleDocument29 pagesLego4scrum SampleDecassiah0% (1)
- Functional Safety and IEC 61508Document13 pagesFunctional Safety and IEC 61508rujisak_m75% (4)
- FREE SPACE OPTICS Seminar ReportDocument20 pagesFREE SPACE OPTICS Seminar ReportNaveen Kumar N50% (2)
- TES-P-119-38-R0-Transformer Regulation and On Load Tap Changer SelectionDocument8 pagesTES-P-119-38-R0-Transformer Regulation and On Load Tap Changer SelectionZain-Ul- AbdeenNo ratings yet
- Requirement of Current Transformer in MicomDocument8 pagesRequirement of Current Transformer in MicomnmanikandanNo ratings yet
- DC Performance Comparisons of Cmos vs. Bipolar Ldos When Operating in "Dropout" (V Nominal V) ModeDocument6 pagesDC Performance Comparisons of Cmos vs. Bipolar Ldos When Operating in "Dropout" (V Nominal V) ModeMarle ReginoNo ratings yet
- Understanding Output Voltage Limitations of DC/DC Buck ConvertersDocument4 pagesUnderstanding Output Voltage Limitations of DC/DC Buck ConvertersHossam SobhyNo ratings yet
- Understanding DC-DC BUCKDocument4 pagesUnderstanding DC-DC BUCKchronixNo ratings yet
- Understanding Output Voltage Limitations of DC/DC Buck ConvertersDocument4 pagesUnderstanding Output Voltage Limitations of DC/DC Buck ConvertersHossam SobhyNo ratings yet
- Current Controller For Stepping Motors: DescriptionDocument8 pagesCurrent Controller For Stepping Motors: Descriptiontryu40No ratings yet
- Fundamentals of On-Resistance in Load Switches: Application ReportDocument9 pagesFundamentals of On-Resistance in Load Switches: Application Reportbookreader1968No ratings yet
- And8255 D PDFDocument12 pagesAnd8255 D PDFrazvanpantur_2878171No ratings yet
- 2.simulation of Single Phase Full Bridge Converter Using LTspiceDocument10 pages2.simulation of Single Phase Full Bridge Converter Using LTspiceabcdefg0% (1)
- Overvoltage Protection For Isolated DC/DC Converter: Koteshwar Rao, Applications Lead, Isolation, Interface ProductsDocument3 pagesOvervoltage Protection For Isolated DC/DC Converter: Koteshwar Rao, Applications Lead, Isolation, Interface ProductsShaik Abdul HameedNo ratings yet
- Sboa 383Document6 pagesSboa 383王政雄No ratings yet
- Automatic Change-Over SwitchDocument7 pagesAutomatic Change-Over SwitchFaizan NazirNo ratings yet
- EEE Lab ManualDocument26 pagesEEE Lab ManualPrabin RoyNo ratings yet
- Exp MachinesDocument8 pagesExp MachinesAngelina JolieNo ratings yet
- LM1117Document12 pagesLM1117George ArambuloNo ratings yet
- Exp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.Document7 pagesExp. 5 - Terminal Characteristis and Parallel Operation of Single Phase Transformers.AbhishEk SinghNo ratings yet
- Experiment-6 Single Phase AC Voltage ControllerDocument14 pagesExperiment-6 Single Phase AC Voltage ControllerBobNo ratings yet
- Study of Bridge Rectifier: ObjectivesDocument3 pagesStudy of Bridge Rectifier: ObjectivesDeepak KumbharNo ratings yet
- LM397MF Comparador 6 Pines PDFDocument8 pagesLM397MF Comparador 6 Pines PDFAndres AlegriaNo ratings yet
- Pid 4349933Document7 pagesPid 4349933Huy Ngọc DươngNo ratings yet
- Design of A Low-Dropout Linear RegulatorDocument4 pagesDesign of A Low-Dropout Linear RegulatorParindraNo ratings yet
- Trip Circuit Supervision MicomDocument5 pagesTrip Circuit Supervision Micomtosikur rahmanNo ratings yet
- Constant-Power Source: Constant Power, Control Loop, Linear Voltage Regulator, High-Side Power/current MonitorDocument4 pagesConstant-Power Source: Constant Power, Control Loop, Linear Voltage Regulator, High-Side Power/current MonitorJonathan JaegerNo ratings yet
- Experiment 3 XFR RegulationDocument9 pagesExperiment 3 XFR RegulationMath Is AwesomeNo ratings yet
- Designing With ReferencesDocument12 pagesDesigning With Referencesantares71No ratings yet
- LD1117 Series: Low Drop Fixed and Adjustable Positive Voltage RegulatorsDocument38 pagesLD1117 Series: Low Drop Fixed and Adjustable Positive Voltage RegulatorsNafise AshrafiNo ratings yet
- Regulador LD1117 SeriesDocument38 pagesRegulador LD1117 Seriesprubassoftdigital2 softdigitalNo ratings yet
- LD1117 Series: Low Drop Fixed and Adjustable Positive Voltage RegulatorsDocument38 pagesLD1117 Series: Low Drop Fixed and Adjustable Positive Voltage RegulatorsmejoralNo ratings yet
- High-Input Voltage, Adjustable, 3-Terminal, Linear RegulatorDocument19 pagesHigh-Input Voltage, Adjustable, 3-Terminal, Linear Regulatormarlon corpuzNo ratings yet
- Analog SwitchDocument14 pagesAnalog SwitchfavamaoNo ratings yet
- Simplified AnalysisDocument92 pagesSimplified AnalysisNamiraNo ratings yet
- Section 2 Transmission Line Theory: MotorolaDocument10 pagesSection 2 Transmission Line Theory: MotorolamiteshyogeshNo ratings yet
- L200 Design GuideDocument21 pagesL200 Design Guidetxe_scientistNo ratings yet
- Simulation of Single Phase Full Bridge Converter Using LTspiceDocument9 pagesSimulation of Single Phase Full Bridge Converter Using LTspicegoten10daNo ratings yet
- 6283-Article Text-16473-1-10-20140217Document8 pages6283-Article Text-16473-1-10-20140217ivasi ivasiNo ratings yet
- Feature Summary: Very Low Drop 1A RegulatorDocument17 pagesFeature Summary: Very Low Drop 1A RegulatorAn as akrasNo ratings yet
- Var Load Sharer: Application FunctionDocument4 pagesVar Load Sharer: Application FunctionIndra SinagaNo ratings yet
- Low Dropout RegulatorsDocument3 pagesLow Dropout RegulatorsAzhagesvaran TamilselvamNo ratings yet
- CYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorDocument32 pagesCYCLE-2:Experiment 1 Steady-State Performance of A 3-Phase Induction MotorSumit SinghNo ratings yet
- Variable DC Power Using Full Bridge ConverterDocument6 pagesVariable DC Power Using Full Bridge Convertergoten10daNo ratings yet
- Ece Vii Power Electronics (10ec73) AssignmentDocument6 pagesEce Vii Power Electronics (10ec73) AssignmentThomas PriceNo ratings yet
- Experiment 2 ElectronicsDocument6 pagesExperiment 2 ElectronicsRhea Daluddung SanchezNo ratings yet
- dc1192 1267351Document4 pagesdc1192 1267351Michael TriviñoNo ratings yet
- Calculation of Reference Values:: Ref Ref, A/ B Nom A/bDocument7 pagesCalculation of Reference Values:: Ref Ref, A/ B Nom A/bTufail AlamNo ratings yet
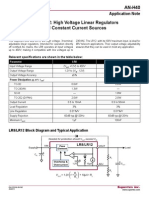
- An-H40-High Voltage Linear RegulatorsDocument5 pagesAn-H40-High Voltage Linear Regulatorsconti51No ratings yet
- 5.AC Phase Control Using SCRDocument8 pages5.AC Phase Control Using SCRabcdefgNo ratings yet
- RF LoadLine DesignDocument8 pagesRF LoadLine DesignHosein ZadeNo ratings yet
- Ti Data SheetDocument15 pagesTi Data SheetGianluca FerreraNo ratings yet
- IEEE - Cascoded OTA Based LDODocument5 pagesIEEE - Cascoded OTA Based LDORajatNo ratings yet
- IIID Lect 16 2015 Diff. Amp CM-loadDocument15 pagesIIID Lect 16 2015 Diff. Amp CM-loadRajatNo ratings yet
- Advancement and Challenges in MOSFET ScalingDocument17 pagesAdvancement and Challenges in MOSFET ScalingRajatNo ratings yet
- Seventy Years of Getting Transistorized 2017Document5 pagesSeventy Years of Getting Transistorized 2017RajatNo ratings yet
- Clickatell SMPPDocument15 pagesClickatell SMPPLoganAdminNo ratings yet
- AMARI UE Simbox SeriesDocument4 pagesAMARI UE Simbox SeriesJohn olivNo ratings yet
- CT System E-User Leaflet: Multi-Language Operator Documentation IntroductionDocument16 pagesCT System E-User Leaflet: Multi-Language Operator Documentation IntroductionNayer Alfredo Marrugo GutierrezNo ratings yet
- Annex A Guide On The Use of The e IPCRF For SY 2020 2021Document5 pagesAnnex A Guide On The Use of The e IPCRF For SY 2020 2021Vezi Ceni ZuntNo ratings yet
- Ramdump Wcss Msa0 2022-03-01 14-34-14 PropsDocument13 pagesRamdump Wcss Msa0 2022-03-01 14-34-14 PropsDenis MartinovicNo ratings yet
- GTMaritime GTRAFT Brochure DigitalDocument4 pagesGTMaritime GTRAFT Brochure Digitalchen wansinNo ratings yet
- Sla Management Framework Using Predictions and SurvingDocument2 pagesSla Management Framework Using Predictions and SurvingSoham Raje PatilNo ratings yet
- How To Use The Pumping TheoremDocument10 pagesHow To Use The Pumping TheoremIulian CătălinNo ratings yet
- Math Symbols PowerPoint Free PPT by SageFox 341Document24 pagesMath Symbols PowerPoint Free PPT by SageFox 341Gie Escoto OcampoNo ratings yet
- Elta 2032Document2 pagesElta 2032Pablo RomeroNo ratings yet
- Readme CadenceDocument12 pagesReadme CadenceEliasA.TiongkiaoNo ratings yet
- Don Nshombo - Cover - Letter - PHPDocument2 pagesDon Nshombo - Cover - Letter - PHPDon Gobbi NshomboNo ratings yet
- THE IMPACT OF COMPUTERIZED ACCOUNTING On Organization PerformanceDocument63 pagesTHE IMPACT OF COMPUTERIZED ACCOUNTING On Organization Performanceharoon rashidNo ratings yet
- Brochure - SYSTIMAX Structured Cabling SystemsDocument9 pagesBrochure - SYSTIMAX Structured Cabling Systemsnasnsq.ps4No ratings yet
- Avigilon - Product Brochure - enDocument36 pagesAvigilon - Product Brochure - enPedro JesusNo ratings yet
- hw11 SolutionDocument6 pageshw11 SolutionAMIT VERMANo ratings yet
- SWOT AnalysisDocument2 pagesSWOT AnalysisThilini Gayathri MuthunayakeNo ratings yet
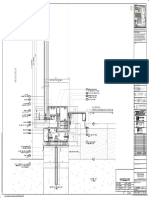
- DetaiDocument11 pagesDetaiNgô AnhNo ratings yet
- Oaa CWL Ab + + 2026 1Document1 pageOaa CWL Ab + + 2026 1Mark TatonNo ratings yet
- AWS Sample ResumeDocument7 pagesAWS Sample ResumeSwathiNo ratings yet
- Logo! Tde Pi - A5e33039880 - 042014Document2 pagesLogo! Tde Pi - A5e33039880 - 042014Marco Antonio Quispe RoqueNo ratings yet
- CHARGED Electric Vehicles Magazine - April-June 2023Document84 pagesCHARGED Electric Vehicles Magazine - April-June 2023clubeautomovelviseuNo ratings yet
- 2.3 Linear EquationsDocument2 pages2.3 Linear EquationsFaraa BellaNo ratings yet
- Owner's Manual: For Your SafetyDocument52 pagesOwner's Manual: For Your SafetyJames L. HunterNo ratings yet
- A Universal Programming Cable For RadiosDocument30 pagesA Universal Programming Cable For RadiosShree Vishnu ShastriNo ratings yet