You might also like
- Atlas of Stress-Strain CurvesDocument808 pagesAtlas of Stress-Strain Curvesankitsarvaiya100% (3)
- Summative Test No. 3 Math 6 Quarter 3Document2 pagesSummative Test No. 3 Math 6 Quarter 3jodzmary86100% (3)
- FEA TheoryDocument49 pagesFEA Theoryof_switzerlandNo ratings yet
- FEA TheoryDocument49 pagesFEA Theoryof_switzerlandNo ratings yet
- Analysis of Balancing of Unbalanced Rotors and Long Sfts Using GUI MATLAB - 46862Document31 pagesAnalysis of Balancing of Unbalanced Rotors and Long Sfts Using GUI MATLAB - 46862Gustavo da Silva100% (1)
- Robotics Mechanism and ApplicationsDocument6 pagesRobotics Mechanism and ApplicationsRajveer Singh SachdevNo ratings yet
- Important Oral QuestionsDocument7 pagesImportant Oral QuestionsDipak RandiveNo ratings yet
- A O G E I R - D S: Nalysis F Yroscopic Ffects N Otor ISC YstemsDocument48 pagesA O G E I R - D S: Nalysis F Yroscopic Ffects N Otor ISC YstemsTarun BhardwajNo ratings yet
- Blade Arrangments 1Document4 pagesBlade Arrangments 1Ravi MirzaNo ratings yet
- Design of A Simple Structured Pneumatic Robotic ArmDocument9 pagesDesign of A Simple Structured Pneumatic Robotic ArmaditdharkarNo ratings yet
- Group 10Document65 pagesGroup 10RioNo ratings yet
- RobotDocument17 pagesRobotpdhananjaya007No ratings yet
- Design Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDocument5 pagesDesign Calculation of Propeller Shaft (Landcruiser) : Abstract - The Power Transmission System Is The GreatestDr. Aung Ko Latt100% (1)
- air conditioning cycleDocument36 pagesair conditioning cycleS V Garata ReddyNo ratings yet
- Module 1: Overview On Rotor Dynamics History and Recent TrendsDocument3 pagesModule 1: Overview On Rotor Dynamics History and Recent TrendsHanmant PhadatareNo ratings yet
- Bme - Part 2Document44 pagesBme - Part 2Sumanth ChallaNo ratings yet
- Design Implementation ofDocument9 pagesDesign Implementation ofilusimataNo ratings yet
- Machine Tools Design: InstructorsDocument42 pagesMachine Tools Design: InstructorsAladdin AdelNo ratings yet
- Design Project Spur GearDocument5 pagesDesign Project Spur GearAbel BatuNo ratings yet
- Ijser: Modeling and Simulation of A Differential Drive Mobile RobotDocument6 pagesIjser: Modeling and Simulation of A Differential Drive Mobile Robothamza malikNo ratings yet
- Auto-Balancing Two Wheeled Inverted Pendulum RobotDocument6 pagesAuto-Balancing Two Wheeled Inverted Pendulum Robotsaran gowdaNo ratings yet
- Gear Guide 060817Document0 pagesGear Guide 060817Anonymous oAbjbl4HNo ratings yet
- The Effect of Unbalance On Bearing LifeDocument8 pagesThe Effect of Unbalance On Bearing Lifemans2014100% (2)
- Robotics Course MaterialDocument36 pagesRobotics Course MaterialrajeshkunuNo ratings yet
- Lecture 2 Machine Tools Design - Chapter 2Document42 pagesLecture 2 Machine Tools Design - Chapter 2Ashraf AhmedNo ratings yet
- Ch1 Introduction, Joints, ConfigurationsDocument12 pagesCh1 Introduction, Joints, ConfigurationsMelkamu SimenehNo ratings yet
- Position Control and Trajectory Tracking of The Stewart PlatformDocument27 pagesPosition Control and Trajectory Tracking of The Stewart PlatformGunjan KhutNo ratings yet
- Robotics Unit NotesDocument84 pagesRobotics Unit NotesSattanathanNo ratings yet
- State Space System Modeling of A QuadCopter UAVDocument12 pagesState Space System Modeling of A QuadCopter UAVSamuel MergaNo ratings yet
- Cim Module 4Document21 pagesCim Module 4Shashank ShastriNo ratings yet
- Morphology of The Robot, Transmission, Actuators and SensorsDocument11 pagesMorphology of The Robot, Transmission, Actuators and SensorsErick NegreteNo ratings yet
- Robotics - 2 MarksDocument10 pagesRobotics - 2 MarksVijayNo ratings yet
- Detection of Unbalance in Rotating Machines Using PDFDocument14 pagesDetection of Unbalance in Rotating Machines Using PDFKonstantinos KamarasNo ratings yet
- Gear Chikuku 1Document37 pagesGear Chikuku 1Kelvin Kindice MapurisaNo ratings yet
- Spur GearDocument98 pagesSpur Geargautham_93No ratings yet
- Department of Mechanical Engineering: ME 2028 RoboticsDocument62 pagesDepartment of Mechanical Engineering: ME 2028 RoboticsmohanmzcetNo ratings yet
- Rotor DynamicsDocument5 pagesRotor DynamicsChoochart ThongnarkNo ratings yet
- Detecting machine unbalance using shaft deflection measurementsDocument13 pagesDetecting machine unbalance using shaft deflection measurementsMuhammad Fadel1447798No ratings yet
- Blade Erato Blue OrıgınDocument14 pagesBlade Erato Blue OrıgınaircarmediaNo ratings yet
- Hybrid Crawling and Flying RoverDocument17 pagesHybrid Crawling and Flying Rovernaveen kumarNo ratings yet
- International Engineering Journal For Research & DevelopmentDocument13 pagesInternational Engineering Journal For Research & Developmentdinosaur x-drakeNo ratings yet
- Ir Unit 1Document9 pagesIr Unit 1Muthuvel MNo ratings yet
- Gear Box Machine DesignDocument28 pagesGear Box Machine DesignPankaj DoshiNo ratings yet
- Chapter 2Document10 pagesChapter 2Kyaw SoeNo ratings yet
- Part A Ans Key 1,2,4Document3 pagesPart A Ans Key 1,2,4VenkadeshNo ratings yet
- School of Mechanical Engineering DepartmentDocument75 pagesSchool of Mechanical Engineering DepartmentWilliam Jaya PrakashNo ratings yet
- Ravikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043Document15 pagesRavikumar 2020 IOP Conf. Ser. Mater. Sci. Eng. 988 012043ko koNo ratings yet
- DL 2602WW INGDocument11 pagesDL 2602WW INGKamanziNo ratings yet
- Engineering Structures: I. Bel Mabrouk, A. El Hami, L. Walha, B. Zghal, M. HaddarDocument10 pagesEngineering Structures: I. Bel Mabrouk, A. El Hami, L. Walha, B. Zghal, M. Haddarpalash22No ratings yet
- Transmission Error in Gears Journal Article Summarizes Causes and EffectsDocument3 pagesTransmission Error in Gears Journal Article Summarizes Causes and Effectsarda akkayaNo ratings yet
- Basic Concepts of RoboticsDocument47 pagesBasic Concepts of RoboticsPRADEEP100% (1)
- Design and Manufacturing of Hydro Pulper - 1604658130Document7 pagesDesign and Manufacturing of Hydro Pulper - 1604658130vanhuuduc102031No ratings yet
- Elements of GearDocument7 pagesElements of GearShashindra DhopeshwarNo ratings yet
- IJMTST08S0703Document8 pagesIJMTST08S0703N. P. JAGANNo ratings yet
- Unit - 1 HTDocument57 pagesUnit - 1 HTSoham PendseNo ratings yet
- H TaheriKinematicsModelofFourMecanumWMRDocument5 pagesH TaheriKinematicsModelofFourMecanumWMRvanthanhbn133No ratings yet
- Detecting Unbalance in Rotating Machines Using Shaft Deflection MeasurementsDocument14 pagesDetecting Unbalance in Rotating Machines Using Shaft Deflection MeasurementsShashi Bhushan KumarNo ratings yet
- Bevel Gear Project ReportDocument22 pagesBevel Gear Project ReportAnkit BurnwalNo ratings yet
- Determining Unbalance in Rotating Machines Using Vibration AnalysisDocument7 pagesDetermining Unbalance in Rotating Machines Using Vibration AnalysisNaruto UzumakiNo ratings yet
- Blade ArrangmentsDocument6 pagesBlade ArrangmentsRavi MirzaNo ratings yet
- Irjet V5i9209 PDFDocument12 pagesIrjet V5i9209 PDFAnujNo ratings yet
- Performance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisFrom EverandPerformance-Based Gear Metrology: Kinematic - Transmission - Error Computation and DiagnosisNo ratings yet
- Algorithm in Automated Press Fit For Rotor-Shaft Assembly of An Induction MotorDocument7 pagesAlgorithm in Automated Press Fit For Rotor-Shaft Assembly of An Induction MotorSathish KumarNo ratings yet
- A Study of Vibration Analysis For Gearbox CasingDocument7 pagesA Study of Vibration Analysis For Gearbox Casingom_prakash1986No ratings yet
- Vibration Transmission of Hard Disk SpindleDocument5 pagesVibration Transmission of Hard Disk SpindleSathish KumarNo ratings yet
- Vibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SDocument14 pagesVibration Analysis Including Stator Rotor Hou 2018 Journal of Electrical SSathish KumarNo ratings yet
- Python Basics Handbook PDFDocument332 pagesPython Basics Handbook PDFAshutosh GuptaNo ratings yet
- HyperMesh 11.0 Core TutorialsDocument497 pagesHyperMesh 11.0 Core TutorialsSathish KumarNo ratings yet
- Siemens Rotating Machinery GuideDocument191 pagesSiemens Rotating Machinery GuideSathish KumarNo ratings yet
- Parallel HEV Hybrid Controller Modeling For Power ManagementDocument7 pagesParallel HEV Hybrid Controller Modeling For Power ManagementIago HenriqueNo ratings yet
- HM TetraMesh Extract PDFDocument7 pagesHM TetraMesh Extract PDFSathish KumarNo ratings yet
- Fluid Mechanics KunduDocument284 pagesFluid Mechanics KunduSathish KumarNo ratings yet
- Fatigue of ShaftDocument8 pagesFatigue of ShaftSathish KumarNo ratings yet
- Calculating Winding TemperatureDocument3 pagesCalculating Winding TemperatureSathish KumarNo ratings yet
- Study On Determination of Durability AnalysisDocument8 pagesStudy On Determination of Durability AnalysisSathish KumarNo ratings yet
- Module 5 Extrusion Lecture 1 PDFDocument10 pagesModule 5 Extrusion Lecture 1 PDFaditya sharma100% (1)
- Nastran 2018.2 Rotor DynamicsDocument277 pagesNastran 2018.2 Rotor DynamicsSathish KumarNo ratings yet
- Industrial Engineering by S K MondalDocument318 pagesIndustrial Engineering by S K MondalNikhil Batham100% (7)
- Introduction To MATLAB - Sikander M. MirzaDocument45 pagesIntroduction To MATLAB - Sikander M. MirzaNasir JumaniNo ratings yet
- CH 6Document20 pagesCH 6Pushparaj VigneshNo ratings yet
- Random Vibration Analysis of Flight RecorderDocument6 pagesRandom Vibration Analysis of Flight RecorderSathish KumarNo ratings yet
- GATE Mathematics Questions All Branch by S K MondalDocument192 pagesGATE Mathematics Questions All Branch by S K Mondalmyidprince96% (23)
- Modal Analysis of Rotor Assembly of Vertical Turbine Pump PDFDocument9 pagesModal Analysis of Rotor Assembly of Vertical Turbine Pump PDFSathish KumarNo ratings yet
- FVM Witch OpenFOAM-MatlabDocument817 pagesFVM Witch OpenFOAM-MatlabDavid Mestanza100% (1)
- High Speed Motor DesignDocument6 pagesHigh Speed Motor DesignSathish KumarNo ratings yet
- Ijser: The Lebesgue Integral and Measure TheoryDocument2 pagesIjser: The Lebesgue Integral and Measure TheoryMRNo ratings yet
- Math Ed 485 Algebra Course KCDocument5 pagesMath Ed 485 Algebra Course KCExtra MailNo ratings yet
- Newton's 2nd Law Practice Problems F=maDocument2 pagesNewton's 2nd Law Practice Problems F=maLhaine F.No ratings yet
- The Effects of Simplifications On Isolated Wheel AerodynamicsDocument12 pagesThe Effects of Simplifications On Isolated Wheel AerodynamicsDaniel JueNo ratings yet
- F 289 - 96 - Rji4os05ngDocument3 pagesF 289 - 96 - Rji4os05ngjayakumarNo ratings yet
- Course: Metrology Code: MT-212 2nd Year, Mechanical TechnologyDocument10 pagesCourse: Metrology Code: MT-212 2nd Year, Mechanical TechnologyAbban SiddiquiNo ratings yet
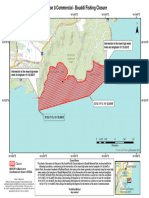
- Bouddi National Park Fishing Exclusion ZoneDocument1 pageBouddi National Park Fishing Exclusion ZonejdhjdhjdhNo ratings yet
- B.sc. (REGULAR) 2019 Credit Pattern-3Document6 pagesB.sc. (REGULAR) 2019 Credit Pattern-3Nikhil NikamNo ratings yet
- Pengantar Fisika Material + Bab I. Ikatan Antar AtomDocument18 pagesPengantar Fisika Material + Bab I. Ikatan Antar AtomNico KurniawanNo ratings yet
- Sample Problems of Stresses with Step-by-Step SolutionsDocument8 pagesSample Problems of Stresses with Step-by-Step SolutionsAllaine VictoriaNo ratings yet
- Getto multiplo predisposto per moduli induttiviDocument2 pagesGetto multiplo predisposto per moduli induttiviAbdulaziz AlrawiNo ratings yet
- Probability and StatisticsDocument2 pagesProbability and StatisticsKristine Mae CainongNo ratings yet
- JPME Volume 21 Issue 1 Pages 9-16Document8 pagesJPME Volume 21 Issue 1 Pages 9-16كاظم طارقNo ratings yet
- DR Bimrew Tamrat AdmasuDocument2 pagesDR Bimrew Tamrat AdmasuYonas MulugetaNo ratings yet
- Dynaflo 6220 / 6230 Model Numbers: 62201, 62203 & 62303: Transfer PumpsDocument2 pagesDynaflo 6220 / 6230 Model Numbers: 62201, 62203 & 62303: Transfer PumpsMohammad ZeeshanNo ratings yet
- Strain-Controlled Fatigue Testing: Standard Test Method ForDocument16 pagesStrain-Controlled Fatigue Testing: Standard Test Method ForNilton SantillanNo ratings yet
- Hydrogel RheologyDocument24 pagesHydrogel RheologyAna Clara SoaresNo ratings yet
- Cupper Tub Ficha TecnicaDocument10 pagesCupper Tub Ficha TecnicapierreNo ratings yet
- Celestial ManualDocument36 pagesCelestial ManualAdel ANo ratings yet
- An Investigation of The Fatigue and Fretting PerformanceDocument19 pagesAn Investigation of The Fatigue and Fretting PerformanceKrishna PrasadNo ratings yet
- Solutions of Non-Linear Partial Differential EQ V. GOODDocument52 pagesSolutions of Non-Linear Partial Differential EQ V. GOODRam Asrey Gautam100% (5)
- Applying asymptotic methods to complex analysis problemsDocument1 pageApplying asymptotic methods to complex analysis problemsaudaciousribbonNo ratings yet
- Main Contents: Vegetable Matter ClearingDocument14 pagesMain Contents: Vegetable Matter ClearingPricopNo ratings yet
- Research ArticleDocument14 pagesResearch ArticlePankaj KumarNo ratings yet
- Module 2Document76 pagesModule 2Raj KamalNo ratings yet
- B2 ListDocument3 pagesB2 ListAreli NavaNo ratings yet
- Soal PR TermodinamikaDocument10 pagesSoal PR TermodinamikaanjaniNo ratings yet
- EXERCISE 6 + SolutionsDocument6 pagesEXERCISE 6 + SolutionsEmmanuel WadiraNo ratings yet
- Notes-Motion From BYjusDocument12 pagesNotes-Motion From BYjusSidra JamilNo ratings yet