You might also like
- Flight Factor A350 ManualDocument218 pagesFlight Factor A350 Manualvasilisnikon90% (20)
- Jeppesen Introduction FullDocument73 pagesJeppesen Introduction Fullaztecsim100% (1)
- Cyyc (Calgary Intl) - R (10dec15) PDFDocument48 pagesCyyc (Calgary Intl) - R (10dec15) PDFnabatman0% (1)
- Analysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As ReceiverDocument16 pagesAnalysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As Receiverabdulmalik saniNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Carpigiani LABO 8 12EDocument54 pagesCarpigiani LABO 8 12ERnav rnav100% (1)
- HGSPilot GuideDocument146 pagesHGSPilot GuideKeshav Sinha100% (1)
- VVTSDocument12 pagesVVTSCalvin MckinneyNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument61 pagesJeppview For Windows: List of Pages in This Trip Kitorionclass0% (1)
- Avionic Emb 145-3Document130 pagesAvionic Emb 145-3Henry Blandon100% (4)
- Machine Learning For Position Prediction and Determination in Aerial Base Station SystemDocument6 pagesMachine Learning For Position Prediction and Determination in Aerial Base Station Systemathar shahzadNo ratings yet
- ModellingDME PreprintDocument11 pagesModellingDME Preprintmhemnhaidar90No ratings yet
- ADS-B Over Satellite Global Air Traffic Surveillance From SpaceDocument6 pagesADS-B Over Satellite Global Air Traffic Surveillance From SpaceGeorgievNo ratings yet
- Sensors 22 07939 With CoverDocument22 pagesSensors 22 07939 With Cover01fe20bar032No ratings yet
- DME Modell Preprint PDFDocument17 pagesDME Modell Preprint PDFAnonymous 3ORE6hNo ratings yet
- Differential GPS Navigation Using HF Ground Wave TransmissionsDocument11 pagesDifferential GPS Navigation Using HF Ground Wave TransmissionsSeamen 777No ratings yet
- 14Document11 pages14احمد نديم اسماعيلNo ratings yet
- Performance Analysis of Network-RTK Techniques ForDocument8 pagesPerformance Analysis of Network-RTK Techniques ForSergiy PogoryelovNo ratings yet
- Skraparlis 2009Document4 pagesSkraparlis 2009VanNo ratings yet
- Sensors: Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DMEDocument19 pagesSensors: Analysis of DME/DME Navigation Performance and Ground Network Using Stretched-Front-Leg Pulse-Based DMEInnocent SalahoNo ratings yet
- TRCK - Tracking Systems For Satellite CommunicationsDocument15 pagesTRCK - Tracking Systems For Satellite CommunicationsYeroosan seenaaNo ratings yet
- Analysis of A Navigation Antenna Installed On A Civil AirplaneDocument4 pagesAnalysis of A Navigation Antenna Installed On A Civil Airplanefakher hamoucheNo ratings yet
- A GPS Based Navigation Aid For Blind: Wamadeva Balachandran, Franjo Cecelja, Piotr PtasinskiDocument3 pagesA GPS Based Navigation Aid For Blind: Wamadeva Balachandran, Franjo Cecelja, Piotr PtasinskiSagor SahaNo ratings yet
- Global Landing System: Service PaperDocument12 pagesGlobal Landing System: Service PaperGaurav PokhriyalNo ratings yet
- Differential GPS For Small UAS Using ConDocument10 pagesDifferential GPS For Small UAS Using ConOlivier LaylyNo ratings yet
- GlobeComm DPC NewDocument6 pagesGlobeComm DPC Newsumitstop2No ratings yet
- Lecture 30Document4 pagesLecture 30RidhamNo ratings yet
- 10.GPS Lect.10Document18 pages10.GPS Lect.10tofa abiNo ratings yet
- Mapping 3D Underwater Environments With Smoothed SubmapsDocument14 pagesMapping 3D Underwater Environments With Smoothed SubmapsFloroiu PaulNo ratings yet
- Fast 3D Mapping by Matching Planes Extracted From Range Sensor Point-CloudsDocument6 pagesFast 3D Mapping by Matching Planes Extracted From Range Sensor Point-CloudsNadisson L PavanNo ratings yet
- 7082-Article Text-16677-2-10-20181214Document10 pages7082-Article Text-16677-2-10-20181214N'rique SilvaNo ratings yet
- Cloud Detection System For UAV Sense and Avoid - Cloud Distance Estimation Using TriangulationDocument5 pagesCloud Detection System For UAV Sense and Avoid - Cloud Distance Estimation Using TriangulationrmolibaNo ratings yet
- Measurement and Modeling of The Land Mobile Satellite Channel at Ku-BandDocument11 pagesMeasurement and Modeling of The Land Mobile Satellite Channel at Ku-BandpushyamichowdaryNo ratings yet
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisNo ratings yet
- 1.1.13 Precision Secondary RadarDocument7 pages1.1.13 Precision Secondary Radarln zNo ratings yet
- Input Requirements of Ils Mapper ProgramDocument5 pagesInput Requirements of Ils Mapper ProgramLê Khánh DuyNo ratings yet
- What Is RTK (Real-Time Kinematic) ?Document9 pagesWhat Is RTK (Real-Time Kinematic) ?Renz Janfort Junsay GraganzaNo ratings yet
- Unmanned Aerial Vehicle (UAV) Communications RelayDocument5 pagesUnmanned Aerial Vehicle (UAV) Communications Relayazam.cheNo ratings yet
- Multi Target TrackingDocument6 pagesMulti Target TrackingEric BechhoeferNo ratings yet
- 6 Trimble HD-GNSS White PaperDocument13 pages6 Trimble HD-GNSS White PaperpuputrahsetyoNo ratings yet
- An Examination of Network RTK Gps Services in Great Britain: S. J. Edwards, P. J. Clarke, N. T. Penna and S. GoebellDocument16 pagesAn Examination of Network RTK Gps Services in Great Britain: S. J. Edwards, P. J. Clarke, N. T. Penna and S. GoebellBubbleNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- Enge-Aviation Benefits From GNSSDocument17 pagesEnge-Aviation Benefits From GNSSGabriel Rojas L.No ratings yet
- Real Time GPS Networks (RTN) and Their Implications With Geographic Information Systems (GIS)Document12 pagesReal Time GPS Networks (RTN) and Their Implications With Geographic Information Systems (GIS)bilalnirbanNo ratings yet
- Field Performance of A Novel Wideband Optically Transparent GNSS AntennaDocument2 pagesField Performance of A Novel Wideband Optically Transparent GNSS AntennaThiripurasundari DNo ratings yet
- A Survey On Wireless Position EstimationDocument20 pagesA Survey On Wireless Position EstimationMona GuptaNo ratings yet
- Paper Weinmann Et Al Final VersionDocument8 pagesPaper Weinmann Et Al Final Version7hcpht5scbNo ratings yet
- Kalman Tracking and Bayesian Detection For RADAR RFI BlankingDocument6 pagesKalman Tracking and Bayesian Detection For RADAR RFI BlankingHa PvNo ratings yet
- UAV-Assisted OffloadingDocument6 pagesUAV-Assisted Offloadingom.allafiNo ratings yet
- Airborne Kinematic GPSPositioningfor PhotogrammetryDocument11 pagesAirborne Kinematic GPSPositioningfor PhotogrammetryAzem GanuNo ratings yet
- GPS Signals, Measurements and Accuracy in Less Than 40mDocument23 pagesGPS Signals, Measurements and Accuracy in Less Than 40mUNNATI AGRAWALNo ratings yet
- A Hybrid Localization Approach For Uav WITH INSTALLED MAPDocument6 pagesA Hybrid Localization Approach For Uav WITH INSTALLED MAPMy trickNo ratings yet
- Assignment 02 - SCDocument14 pagesAssignment 02 - SCKavindu PereraNo ratings yet
- Sensor For Small Satellite Relative PNT in Deep SpaceDocument9 pagesSensor For Small Satellite Relative PNT in Deep SpaceRyan LockeNo ratings yet
- Satellite Link Budget AnalysisDocument5 pagesSatellite Link Budget AnalysisKalu NkwNo ratings yet
- CoMP Transmission for UAV-Aided Cognitive Satellite NetworksDocument10 pagesCoMP Transmission for UAV-Aided Cognitive Satellite NetworkshabibNo ratings yet
- Evaluating RTKLIB's Positioning Accuracy Using Low-Cost GNSSDocument7 pagesEvaluating RTKLIB's Positioning Accuracy Using Low-Cost GNSSSudung SitumorangNo ratings yet
- Localization White Paper 052617Document15 pagesLocalization White Paper 052617Umesh GuptaNo ratings yet
- 2018 MIPRO Link Budget Analysis For A Proposed CubesatDocument6 pages2018 MIPRO Link Budget Analysis For A Proposed CubesatFiras ZekiNo ratings yet
- A Shorted-Annular-Ring GPS Antenna For Freight-Carrying Autonomous Rail VehiclesDocument2 pagesA Shorted-Annular-Ring GPS Antenna For Freight-Carrying Autonomous Rail Vehiclesاحمد نديم اسماعيلNo ratings yet
- The Focussed D Algorithm For Real-Time Replanning: Anthony StentzDocument8 pagesThe Focussed D Algorithm For Real-Time Replanning: Anthony StentzpostscriptNo ratings yet
- Link Budget Analysis For A Proposed CubesatDocument6 pagesLink Budget Analysis For A Proposed CubesatDaniel OspinaNo ratings yet
- Article ASMS2006 SDMB IA v1 2Document8 pagesArticle ASMS2006 SDMB IA v1 2martinbeaNo ratings yet
- Cubesat Comm Sys DemoDocument9 pagesCubesat Comm Sys Demokrishnamirtham2e4No ratings yet
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNo ratings yet
- Oceanic Altimetry Using GPS by A HaiderDocument4 pagesOceanic Altimetry Using GPS by A Haideradnanscientist33No ratings yet
- RTKDocument18 pagesRTKSumit KumarNo ratings yet
- Integration of Gnss PP Virtual Reference Station With Inertial DataDocument6 pagesIntegration of Gnss PP Virtual Reference Station With Inertial DataarashNo ratings yet
- DA0X81MB6E0Document66 pagesDA0X81MB6E0Asterman SaidiNo ratings yet
- Akvf NB681Document23 pagesAkvf NB681asfsfsafsafasNo ratings yet
- Dual-Channel Synchronous DC-DC Step-Down Controller With 5V/3.3V LdosDocument22 pagesDual-Channel Synchronous DC-DC Step-Down Controller With 5V/3.3V Ldosrdbm rdbmNo ratings yet
- Dme ConceptDocument43 pagesDme Conceptkiran bogam100% (1)
- Vegas 15341Document23 pagesVegas 15341Eric ArcherNo ratings yet
- Measuring and Testing The Instrument Landing SysteDocument10 pagesMeasuring and Testing The Instrument Landing SysteRnav rnav100% (1)
- Asus Ux305ca RGDocument6 pagesAsus Ux305ca RGRnav rnavNo ratings yet
- 1691993Document7 pages1691993Thein NaingNo ratings yet
- EP0040541A1Document39 pagesEP0040541A1Rnav rnavNo ratings yet
- NCP81205Document1 pageNCP81205Tom TomNo ratings yet
- Modeling Distance Measurement Equipment (DME) Signals Interfering An Airborne GNSS ReceiverDocument11 pagesModeling Distance Measurement Equipment (DME) Signals Interfering An Airborne GNSS ReceiverRnav rnavNo ratings yet
- Instruction Manual: "Controllino" Mini, Maxi and MegaDocument35 pagesInstruction Manual: "Controllino" Mini, Maxi and MegaAlfonso Byrt VitalichNo ratings yet
- DMEDocument27 pagesDMEZer0trix Gaming100% (1)
- Automatic Gain Control (AGC) As An Interference Assessment ToolDocument13 pagesAutomatic Gain Control (AGC) As An Interference Assessment ToolRnav rnavNo ratings yet
- SLT Cours Recap2a PDFDocument22 pagesSLT Cours Recap2a PDFChakib KaNo ratings yet
- Automatismes Manipulations BleuDocument32 pagesAutomatismes Manipulations BleuAstuces AutomatismeNo ratings yet
- Antenna Arrays: 1 Array Factor For N ElementsDocument18 pagesAntenna Arrays: 1 Array Factor For N ElementsZakaria MounirNo ratings yet
- Ils-Ts Instrument Landing System Test System: Data SheetDocument2 pagesIls-Ts Instrument Landing System Test System: Data SheetRnav rnavNo ratings yet
- NanoVNA-F V2 Portable Vector Network Analyzer User Guide V1.0Document29 pagesNanoVNA-F V2 Portable Vector Network Analyzer User Guide V1.0Rnav rnavNo ratings yet
- EURO - Guidance Material For RNAV DesignDocument217 pagesEURO - Guidance Material For RNAV DesignmusaharahmadNo ratings yet
- Ijarece Vol 8 Issue 8 141 144Document4 pagesIjarece Vol 8 Issue 8 141 144Rnav rnavNo ratings yet
- D D U P: Analytical RadDocument8 pagesD D U P: Analytical RadRnav rnavNo ratings yet
- Principes D'electrotechnique PDFDocument686 pagesPrincipes D'electrotechnique PDFYassineZklNo ratings yet
- Preparation of Ice Cream Mix: Dairy Technology B.K.Singh, Dairy TechnologyDocument19 pagesPreparation of Ice Cream Mix: Dairy Technology B.K.Singh, Dairy TechnologyRnav rnavNo ratings yet
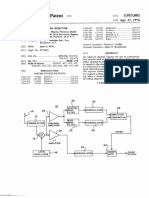
- US3953802Document5 pagesUS3953802Rnav rnavNo ratings yet
- cttn87 15 PDFDocument62 pagescttn87 15 PDFRnav rnavNo ratings yet
- Dtic Ada096265Document155 pagesDtic Ada096265Rnav rnavNo ratings yet
- Sponsored By-Participation American Institute Aeronautics and Astronautics (AIAA) American Astronautical Society (AAS)Document18 pagesSponsored By-Participation American Institute Aeronautics and Astronautics (AIAA) American Astronautical Society (AAS)Rnav rnavNo ratings yet
- Jeppview For Windows: List of Pages in This Trip KitDocument93 pagesJeppview For Windows: List of Pages in This Trip KitAleksandar StjepanovicNo ratings yet
- A320 Approach BriefingDocument1 pageA320 Approach BriefingKhurram NaseemNo ratings yet
- NTSB BAC Final AAR0802 - 070412Document212 pagesNTSB BAC Final AAR0802 - 070412bombardierwatchNo ratings yet
- Chapt - 08 Airport Navigational Aids PDFDocument11 pagesChapt - 08 Airport Navigational Aids PDFPearl BeatriceNo ratings yet
- New Approach Chart Format: Orientation Handbook For TheDocument30 pagesNew Approach Chart Format: Orientation Handbook For Thepelican air100% (29)
- ILS APPROACHDocument1 pageILS APPROACHMichael NevesNo ratings yet
- ATA 34 Worksheet 2021Document14 pagesATA 34 Worksheet 2021abyNo ratings yet
- Jepp Cartas Heathrow IntDocument77 pagesJepp Cartas Heathrow IntElton CacefoNo ratings yet
- SECTION 2-18 Navigation and Communication: Airplane Operations ManualDocument212 pagesSECTION 2-18 Navigation and Communication: Airplane Operations ManualAbhishek Man ShresthaNo ratings yet
- 8260.3B - U.S TerpsDocument436 pages8260.3B - U.S TerpsSergio GuevaraNo ratings yet
- Omdb/Dxb Dubai, Uae: Darax 1T Bubin 3TDocument25 pagesOmdb/Dxb Dubai, Uae: Darax 1T Bubin 3TMohannad AlamayrehNo ratings yet
- How Instrument Landing Systems Guide Planes to RunwaysDocument16 pagesHow Instrument Landing Systems Guide Planes to RunwaysMario GinolaNo ratings yet
- NavigationDocument68 pagesNavigationsakshee gojre100% (1)
- Radio Navigation Aids in BriefDocument8 pagesRadio Navigation Aids in BriefZulfiqar MiraniNo ratings yet
- Radar: " Radio Detection and Ranging "Document70 pagesRadar: " Radio Detection and Ranging "Deena ArdaNo ratings yet
- QRH HB-JHJ Airbus A330Document224 pagesQRH HB-JHJ Airbus A330jlsm511100% (1)
- IZMIR ADNAN MENDERES INTL AIRPORT INFORMATION AND CHARTSDocument36 pagesIZMIR ADNAN MENDERES INTL AIRPORT INFORMATION AND CHARTSHalil OnarNo ratings yet
- Viation Ccurrence Ategories: Efinitions and Sage OtesDocument28 pagesViation Ccurrence Ategories: Efinitions and Sage OtesAvtechNo ratings yet
- SecoDocument18 pagesSecoMosquera AlexNo ratings yet
- 400 Series Installation Manual: GPS 400, GNC 420 (A), and GNS 430 (A)Document132 pages400 Series Installation Manual: GPS 400, GNC 420 (A), and GNS 430 (A)Vitaliy FedchenkoNo ratings yet
- FAA Airport Marking and Lighting StandardsDocument61 pagesFAA Airport Marking and Lighting StandardsAlvaro Antonio Espinoza BallentineNo ratings yet
- Pilot's Handbook Tutorial: Real Add-On Series, No.15Document62 pagesPilot's Handbook Tutorial: Real Add-On Series, No.15Alan Chin Weng LonNo ratings yet
- Egll LPPTDocument133 pagesEgll LPPTRoberto Cabezas MartínezNo ratings yet