You might also like
- Feature-Level Based Video Fusion For Object DetectionDocument6 pagesFeature-Level Based Video Fusion For Object Detectionvasece4537577No ratings yet
- NFTDocument35 pagesNFTdheydieNo ratings yet
- An Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance SystemDocument6 pagesAn Implementation of Moving Object Detection, Tracking and Counting Objects For Traffic Surveillance Systematdeen sNo ratings yet
- Ijcatr 03051001Document7 pagesIjcatr 03051001ATSNo ratings yet
- Moving Object Tracking and Detection in Videos Using MATLAB: A ReviewDocument9 pagesMoving Object Tracking and Detection in Videos Using MATLAB: A ReviewAkhirul HajriNo ratings yet
- Vision Based Moving Object Detection and TrackingDocument6 pagesVision Based Moving Object Detection and Trackingyaregal limenihNo ratings yet
- Surveillance Robot For Tracking Multiple Moving TargetsDocument7 pagesSurveillance Robot For Tracking Multiple Moving Targetspurushothaman sinivasanNo ratings yet
- Smart Security Camera System For Video Surveillance Using Open CVDocument6 pagesSmart Security Camera System For Video Surveillance Using Open CVlambanaveenNo ratings yet
- Pedestrian Detection - Research PaperDocument9 pagesPedestrian Detection - Research PaperAnshumanNo ratings yet
- Hybrid Approach For Semantic Object Detection in VideoDocument4 pagesHybrid Approach For Semantic Object Detection in VideoIJSTENo ratings yet
- Implementation of A Novel Algorithm For Moving Object Tracking in Video SurveillanceDocument9 pagesImplementation of A Novel Algorithm For Moving Object Tracking in Video SurveillancesanjayshelarNo ratings yet
- Moving Object Detection Using Matlab PDFDocument7 pagesMoving Object Detection Using Matlab PDFChetan Turkane100% (2)
- PROJECT REPORT Vidoe TrackingDocument27 pagesPROJECT REPORT Vidoe TrackingKunal KucheriaNo ratings yet
- Object Recognition For Blind People Using Portable Camera: Vikky Mohane Prof. Chetan GodeDocument4 pagesObject Recognition For Blind People Using Portable Camera: Vikky Mohane Prof. Chetan GodeMehrabNo ratings yet
- Motion Based Summarization and Grouping of Events For Video Surveillance SystemDocument3 pagesMotion Based Summarization and Grouping of Events For Video Surveillance SystemInnovative Research PublicationsNo ratings yet
- Human Fall Detection Using Optical Flow Farne Back PptDocument15 pagesHuman Fall Detection Using Optical Flow Farne Back Pptkandulaanusha20No ratings yet
- A Review of Visual Moving Target TrackingDocument30 pagesA Review of Visual Moving Target TrackingHenrique Mendes Cicarini HottNo ratings yet
- Video Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingDocument12 pagesVideo Segmentation For Moving Object Detection Using Local Change & Entropy Based Adaptive Window ThresholdingCS & ITNo ratings yet
- IJETR021736Document4 pagesIJETR021736erpublicationNo ratings yet
- Digital Image ProcessingDocument13 pagesDigital Image ProcessingSindhuja SambuNo ratings yet
- Video Object Extraction Using Edge Change Detection and Motion EstimationDocument52 pagesVideo Object Extraction Using Edge Change Detection and Motion EstimationNijo JohnNo ratings yet
- Vol 6 4 469 480 SHAFIE PDFDocument12 pagesVol 6 4 469 480 SHAFIE PDFRizal AgustianNo ratings yet
- Video Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionDocument4 pagesVideo Based Detection of Vehicle For Traffic Surveillance System Using Edge DetectionInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Development of An Image Matching System Using OpencvDocument20 pagesDevelopment of An Image Matching System Using OpencvOkunade OluwafemiNo ratings yet
- Video Tracking System Using LabVIEWDocument12 pagesVideo Tracking System Using LabVIEWpavan kumarNo ratings yet
- ICPC 2015 - Object Tracking Techniques SurveyDocument6 pagesICPC 2015 - Object Tracking Techniques SurveyAlexis DieufaitNo ratings yet
- 2021 IC e3sconf_icmed2021_01099Document5 pages2021 IC e3sconf_icmed2021_01099R.V.S.LALITHANo ratings yet
- Motion Detection Application Using Web CameraDocument3 pagesMotion Detection Application Using Web CameraIlham ClinkersNo ratings yet
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- Smart CardsDocument39 pagesSmart CardsNandu ShriNo ratings yet
- Motion Object Detector With Higher Detection LevelsDocument4 pagesMotion Object Detector With Higher Detection Levelssurendiran123No ratings yet
- Image Processing: Object Tracking With Color DetectionDocument15 pagesImage Processing: Object Tracking With Color DetectionAyush MariaNo ratings yet
- PH.D AbstractDocument1 pagePH.D AbstractrajlokadalNo ratings yet
- BSPC-D-24-01669_reviewerDocument19 pagesBSPC-D-24-01669_reviewerokuwobiNo ratings yet
- Conveyor visual tracking using robot vision through differential image analysisDocument6 pagesConveyor visual tracking using robot vision through differential image analysisDuvan TamayoNo ratings yet
- 10 1109icraie 2018 8710421Document7 pages10 1109icraie 2018 8710421Muhammad NourNo ratings yet
- Embedded Computer Vision System Detects Traffic ObjectsDocument20 pagesEmbedded Computer Vision System Detects Traffic ObjectseviteNo ratings yet
- Report Image ProcessingDocument19 pagesReport Image Processingnahim islamNo ratings yet
- Object Detection Classification and Tracking of Everyday Common ObjectsDocument5 pagesObject Detection Classification and Tracking of Everyday Common ObjectsInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Object TrackingDocument23 pagesObject TrackingRahul PaulNo ratings yet
- Image Processing: Object Tracking With Color DetectionDocument14 pagesImage Processing: Object Tracking With Color DetectionAyush MariaNo ratings yet
- 17 ConclusionDocument3 pages17 ConclusiontreresNo ratings yet
- 17 ConclusionDocument3 pages17 ConclusionutkarshNo ratings yet
- Embodied Visual Object Recognition PlatformDocument5 pagesEmbodied Visual Object Recognition PlatformYoSuf OmRanNo ratings yet
- Image Processing Techniques For Object Tracking in Video Surveillance - A Survey 2015-2Document6 pagesImage Processing Techniques For Object Tracking in Video Surveillance - A Survey 2015-2musalmanmusalmanNo ratings yet
- Mobile Camera As A Human Vision in Augmented Reality: TELKOMNIKA, Vol. 11, No. 7, July 2013, Pp. 3568 3575Document7 pagesMobile Camera As A Human Vision in Augmented Reality: TELKOMNIKA, Vol. 11, No. 7, July 2013, Pp. 3568 3575Aliyul Syahda Fuadi RidwanNo ratings yet
- A Literature Survey On Applications of Image Processing For Video SurveillanceDocument3 pagesA Literature Survey On Applications of Image Processing For Video SurveillanceInternational Journal of Innovative Science and Research Technology0% (1)
- Vehicle Detection and Tracking For Traffic ManagementDocument8 pagesVehicle Detection and Tracking For Traffic ManagementIAES IJAINo ratings yet
- Detection & Tracking of Moving ObjectDocument6 pagesDetection & Tracking of Moving ObjectIJIRAENo ratings yet
- Efficient Moving Object Detection Using DECOLOR TechniqueDocument89 pagesEfficient Moving Object Detection Using DECOLOR TechniquePradip RajaNo ratings yet
- Project 1Document53 pagesProject 1suyash jainNo ratings yet
- Human and Moving Object Detection and Tracking Using Image ProcessingDocument4 pagesHuman and Moving Object Detection and Tracking Using Image ProcessingerpublicationNo ratings yet
- Object Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformDocument9 pagesObject Recognition in Infrared Image Sequences Using Scale Invariant Feature TransformJesycaFuenmayorNo ratings yet
- Navstik ReportDocument39 pagesNavstik ReportsNo ratings yet
- Ijettcs 2016 04 01 41Document7 pagesIjettcs 2016 04 01 41International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Capstone PPT 4Document17 pagesCapstone PPT 4Shweta BhargudeNo ratings yet
- Object Detection and Tracking: January 2012Document40 pagesObject Detection and Tracking: January 2012Rafiudeen ANo ratings yet
- Face Detection and Recognition on Mobile DevicesFrom EverandFace Detection and Recognition on Mobile DevicesRating: 1 out of 5 stars1/5 (1)
- Pruning IntroductionDocument13 pagesPruning IntroductionpalansamyNo ratings yet
- ComPreEND Computation Pruning Through Predictive Early Negative Detection For ReLU in A Deep Neural Network AcceleratorDocument14 pagesComPreEND Computation Pruning Through Predictive Early Negative Detection For ReLU in A Deep Neural Network AcceleratorpalansamyNo ratings yet
- VA Applications and Processing StepsDocument12 pagesVA Applications and Processing StepspalansamyNo ratings yet
- DLL IntroDocument76 pagesDLL IntropalansamyNo ratings yet
- Deep Learning Methods For Human Action Recognition: Zeqi YuDocument97 pagesDeep Learning Methods For Human Action Recognition: Zeqi YupalansamyNo ratings yet
- Deep Learning IntroDocument14 pagesDeep Learning IntropalansamyNo ratings yet
- DC Question BankDocument15 pagesDC Question BankpalansamyNo ratings yet
- M.Vithya, S.Meenakshi: Noise Cancellation in Fetal ECG Extraction Using SSNF AlgorithmDocument14 pagesM.Vithya, S.Meenakshi: Noise Cancellation in Fetal ECG Extraction Using SSNF AlgorithmpalansamyNo ratings yet
- Module Week 3 Identifying Electrical ToolsDocument7 pagesModule Week 3 Identifying Electrical ToolsJe Ann OlaytaNo ratings yet
- Manual Honda Jazz Idsi PDF DownloadDocument6 pagesManual Honda Jazz Idsi PDF DownloadPuthra BungsuNo ratings yet
- Dell dd9400Document5 pagesDell dd9400frpinaNo ratings yet
- Sas Clinical Data Integration Fact SheetDocument4 pagesSas Clinical Data Integration Fact SheetChandrasekhar KothamasuNo ratings yet
- Makalah Analysis and IntepretationDocument8 pagesMakalah Analysis and IntepretationDimas HarilukitoNo ratings yet
- Se S2 CT 0002 Alg Fah TKPDocument2 pagesSe S2 CT 0002 Alg Fah TKP--No ratings yet
- 4364 Ie3 Fs 90 180 MM Manual enDocument34 pages4364 Ie3 Fs 90 180 MM Manual enSilviu TichieruNo ratings yet
- Ten Common Mistakes in Finite Element AnalysisDocument2 pagesTen Common Mistakes in Finite Element AnalysiscmuralisNo ratings yet
- 100 MCQ Questions For Operating Systems MCQ Sets PDFDocument29 pages100 MCQ Questions For Operating Systems MCQ Sets PDFghodkeshital291150% (4)
- Public-Key Cryptography: Data and Network Security 1Document15 pagesPublic-Key Cryptography: Data and Network Security 1asadNo ratings yet
- Page 44Document1 pagePage 44Abhishek ShatagopachariNo ratings yet
- Cv-Anglaishager Ben FradjDocument5 pagesCv-Anglaishager Ben FradjAmira BououdNo ratings yet
- GUIBONE - GRADE12 - Week6 Home Learning Plans2Document2 pagesGUIBONE - GRADE12 - Week6 Home Learning Plans2Gizellen GuiboneNo ratings yet
- What Is Innovation?Document9 pagesWhat Is Innovation?Mohit RanaNo ratings yet
- QSK19 CM850 MCRS Wiring DiagramDocument11 pagesQSK19 CM850 MCRS Wiring DiagramMussardNo ratings yet
- LogDocument2 pagesLogBormeyNo ratings yet
- Lec 1 IntroductionDocument11 pagesLec 1 IntroductionHajipur RajNo ratings yet
- Analysis of Roof LoadingDocument6 pagesAnalysis of Roof LoadinghamieraNo ratings yet
- Brochure2-Mobil Greases PDFDocument2 pagesBrochure2-Mobil Greases PDFPedro PerezNo ratings yet
- Run WordcountDocument3 pagesRun WordcountKhushi PatilNo ratings yet
- Part B: User ManualDocument13 pagesPart B: User ManualtecnicoopNo ratings yet
- Chapter 8 SummaryDocument3 pagesChapter 8 SummaryNagiib Haibe Ibrahim Awale 6107No ratings yet
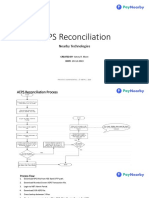
- AEPS ReconciliationDocument5 pagesAEPS ReconciliationAmey More100% (1)
- Nespreneur Brochure NIFTEMDocument12 pagesNespreneur Brochure NIFTEMabhirajNo ratings yet
- GRADUS Catalogue - Stair Edgings & Floor TrimsDocument164 pagesGRADUS Catalogue - Stair Edgings & Floor TrimsHarsha V. PriyaNo ratings yet
- Fleet Management: Warren B. Powell and Huseyin TopalogluDocument32 pagesFleet Management: Warren B. Powell and Huseyin TopalogluBry MyNo ratings yet
- UART Implementation Using FPGA: December 2019Document50 pagesUART Implementation Using FPGA: December 2019V.ASHISH REDDYNo ratings yet
- Grease Component Inspection Sheet AnalysisDocument25 pagesGrease Component Inspection Sheet AnalysisInsannulNo ratings yet
- Ambani Outpaces Biyani (Reliance Buying Big Bazaar) : Presented byDocument8 pagesAmbani Outpaces Biyani (Reliance Buying Big Bazaar) : Presented byAkash B.No ratings yet
- Presario 3060 QsDocument1 pagePresario 3060 QsEver ArcaNo ratings yet