Cours Mastere SE / Stream01-EPU-SI 3
STREAM01 Course / Mastère SE
Distributed embedded Systems
and Real-time networks
Marie-Agnès Peraldi-Frati
AOSTE Project
UNSA- CNRS-INRIA
December 2007
1
Course Schedule
Evolutions in real-time architecture (C)
Real-time Communications (C )
Standards AUTOSAR and OSEK/VDX : A Real-time
Middleware (C)
Example of RealTime embedded protocols
Time triggered Protocol : TTP (C, TD)
An asynchronous network : CAN/VAN protocol (C-TD-
TP)
Marie-agnès Peraldi-Frati- UNSA 1
Cours Mastere SE / Stream01-EPU-SI 3
Plan
Evolutions in real-time architecture
Real-time control system design example
Real-time control systems characteristics
Centralized vs distributed architecture
«Event triggered » vs. «Time triggered» system
Technical context
Examples : Automotive, mobile robots, avionic
Design methodology in automotive
Control system block diagram
Controller+ controlled system
Event triggered, Continuous time, Hierarchy
Feedforward and Feedback control loops
Well established mathematical theory
4
Marie-agnès Peraldi-Frati- UNSA 2
Cours Mastere SE / Stream01-EPU-SI 3
Control system Implementation
ABS/ESP Brake by wire Steer by wire
Engine Control System
Mapping of function
to hardware and
software components
controler
controler
controler
Control system mapping
Engine Control System
Engine Control system Brake Control system
Marie-agnès Peraldi-Frati- UNSA 3
Cours Mastere SE / Stream01-EPU-SI 3
Gasoline engine hardware architecture
Real-time system characteristics ?
Events are emitted by the process and their occurrences are
imposed to the controller.
Interaction with the environment
Reactivity
Measures are permanently emitted by the controlled system.
Measures are received by the controller at a rate determined by
itself
Commands are permanently received by the process
Commands are emitted by the controller at a rate determined by
itself.
8
Marie-agnès Peraldi-Frati- UNSA 4
Cours Mastere SE / Stream01-EPU-SI 3
Hard RTS
Timing problems
Response time, Execution time, Blocking ,Scheduling,
Arbitration, Transmission time, Jitters, Transient error,
Etc …
Safety : absence of catastrophic consequences on
the user and the environment
Reliability : continuity of correct service
Complexity
Centralized – « Dispersed » - Distributed
Determined by the granularity and the physical
distribution of components and computers.
Centralized
• One computer connected to a set of Input/Output
channels
• “Old-style” for embedded systems before the low-cost
microcontrollers. Capteurs
Contrôleur Actionneurs
Processus
10
Marie-agnès Peraldi-Frati- UNSA 5
Cours Mastere SE / Stream01-EPU-SI 3
Advantages of a centralized system
Simple programming model
CPU is a central element
Variation of the power depends of the needs.
Computers are maintain in a safe and secure space
Protection to external elements : fire, temperature
Central management : modifications must be done only
on a single machine
The evolution depends only on the number of available racks.
Any of these reasons might be sufficient to justify a
centralized system
11
Centralized - Dispersed - Distributed
Multiple CPU and Input/output devices on a single
computer
A single common memory space
Communication between modules using a shared memory
(Blackboard)
12
Marie-agnès Peraldi-Frati- UNSA 6
Cours Mastere SE / Stream01-EPU-SI 3
Centralized or Dispersed or Distributed
Dispersed
“Multiple” computers ( 2- 10) architecture
Each one with input/output capabilities
Limited communications between computers
Contrôleur 1
Processus
Contrôleur 2
13
Centralized vs. Dispersed vs. Distributed
Distributed
Processus
Controller 1 Controller 2 Controller 3
Communication link
14
Marie-agnès Peraldi-Frati- UNSA 7
Cours Mastere SE / Stream01-EPU-SI 3
An example of distributed embedded
system
• Multiple controllers connected to their multiple I/O
• Communication between modules by message passing
15
Centralized, Dispersed or Distributed
Distributed
Computer with input/output modules
Multiple computers (until hundred computers)
Few input/output channels by computer
A controller by equipment
Intelligent sensors/actuators
Central components of the system :
Input/Output
16
Marie-agnès Peraldi-Frati- UNSA 8
Cours Mastere SE / Stream01-EPU-SI 3
Benefit of distributed systems
Modularity in the design phase
Multiple teams conceive each node of the system (Car
part manufacturer, IP integration in electronics)
Well-defined, tightly enforced interface (system message
formats)
Independent « Upgrade » of modules that limit effect of
changes on rest of system
Modularity at the resource level
Reduction of the competition for the use of resources.
Incremental addition of I/O and microcontrollers in the
architecture.
17
Benefit of distributed systems
Modularity for the validation/test
Worst case evaluation time is more easy one
module by one.
Modularity in the certification ( Avionic DO-
178B Level A, IEC 61508 SIL3/SIL4)
Limitation of the certification to critical modules
(X-By-Wire in automotive New IEC certification :
AUTOSAR)
18
Marie-agnès Peraldi-Frati- UNSA 9
Cours Mastere SE / Stream01-EPU-SI 3
Benefit of distributed systems
Diagnosis is more simpler to establish
Containment of faults on nodes
Useful for systems with frequent errors on
cabling. Sensors and Sensors and
Sensors and
Actuators OK Actuators OK
Actuators OK
I hear neither I hear C2 but
I hear C3 but
C2 nor C3 not C1
not C1
Error ?
Error ? Error ?
Controller Actuators Process C 1 C. 2 C3
Network cutted
Where is the problem ? 19
Benefits of distributed system
Simplicity in the cabling and the hardware
maintenance
One-wire cabling instead of numerous wire lines.
Simplified connectivity
Substitution of nodes with failures “online”
The system can continue in a degraded operational
mode with a failure node
In case of failure possibility of error confinement
20
Marie-agnès Peraldi-Frati- UNSA 10
Cours Mastere SE / Stream01-EPU-SI 3
Benefits of a distributed system
Fault tolerance
One single point of failure in a centralized system
In a distributed potential fault recovery
mechanisms
A defection of one node may not imply the
defection of all the system.
21
Input/output management
Event Triggered
• system must reacts to significant external events directly and
immediately.
• external Events arrive in a sporadic way
• Closed to “interrupt- driven I/O”
• Efficient – treatments are only executed if necessary
• Concurrency problem – What’s happen if all potential events
arrive concurrently ?
22
Marie-agnès Peraldi-Frati- UNSA 11
Cours Mastere SE / Stream01-EPU-SI 3
Inputs/Outputs management
Time-triggered
• system must reacts to significant external events at pre-
specified instants.
• Events arrive according to a scheduling (fixed or variable
scheduling)
• Closed to the “I/O polling”
• Sometimes inefficient – Treatments are executed in a
periodic way even if it is not necessary.
• Calculable load – for the full system
23
Communications in distributed
systems
Event-Triggered protocols
Communications are initiated when a “send” message is received.
Problem of multiple access ,
Events arrive in a sporadic manner
Time-triggered protocols
Communication are triggered at pre-specified periodic instants.
Message sending is periodic
Message carry the newest information
Message lost is not a big problem
Message update is detected thanks to a modification of its value.
24
Marie-agnès Peraldi-Frati- UNSA 12
Cours Mastere SE / Stream01-EPU-SI 3
Applications domains of distributed
RTS
Automotive systems
Engine/steering/brake functions :
Comfort functions, body electronic functions
Maintenance
Control system, Embedded control/command
Automated production system
Robotics
Avionic
Avionic architecture
Specific communication buses
System on Chip …
25
Example : Evolutions of electronics in
automotive systems
Old style : A centralized power control command
Actuators are triggered using electro mechanical relays
Point to point wire connections
New architecture : distributed numerical controllers with
command of multiple sensors/actuators
Local cabling between ECU (Electronic Control Unit) and its
sensors/actuators.
Global cabling between ECUs
Low power energy is managed by ECU, relays are in charge of
distributing high level power.
26
Marie-agnès Peraldi-Frati- UNSA 13
Cours Mastere SE / Stream01-EPU-SI 3
Evolution in automotive
Past
[Kassadian96]
27
Evolution in automotive
Recent past [Kassadian96]
28
Marie-agnès Peraldi-Frati- UNSA 14
Cours Mastere SE / Stream01-EPU-SI 3
Evolution in automotive
ECU ECU ECU
ECU ECU
ECU ECU
ECU ECU ECU
Present
[Kassadian96]
29
Embedded system in automotive
Electronics represent 20% of a vehicle price
80% of innovations are due to electronics
Control and command laws are more complexes
ESP : Electronic Stability Program
CGC : Chassis control
ACC : Automatic cruise control
Coupling between the different control elements
Brakes, suspensions, engine …
Mechanical command are replaced by electronics commands
X by Wire
30
Marie-agnès Peraldi-Frati- UNSA 15
Cours Mastere SE / Stream01-EPU-SI 3
The Peugeot 607 PSA electronic
architecture
Up to 24 electronic equipment’s are connected through
5 electronic busses
CAN intersystem network
VAN Comfort network
VAN body network 1 dedicated to highly safety critical
functions ( airbags, headlights switching , … )
VAN body network 2 for the other functions (door control,
seat control, fuel additivation requested by particle filter for
multi valve diesel engine …)
An optical data link for large data transfer between navigation
system and the multifunction display
Copyright PSA Peugeot Citroen
31
PSA electrical electronic architecture
Based Bi-VAN – CAN – optical fibre networks
Immediate consequence on wiring
Citroën Xantia number of wires :
670 in previous version
429 in actual version -39%
Peugeot 306 number of wires
635 in previous version
373 in actual version -41%
Copyright PSA Peugeot Citroen
32
Marie-agnès Peraldi-Frati- UNSA 16
Cours Mastere SE / Stream01-EPU-SI 3
Technological context in automotive
Complexity !
Functional :
Architectural
Interaction between systems
Flexibility
33
Functional complexity
Systems size
Number of automatic control laws
Coupling between controllers
34
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 17
Cours Mastere SE / Stream01-EPU-SI 3
Example of Knock: The Physical
phenomenon
Spark ignition engine phases: Intake, Compression,
Explosion, Exhaust
At end of compression, a spark is generated to ignite
air/fuel mixture.
Under particular conditions, a second ignition point is
auto-generated. This causes a 2nd combustion.
When the 2 flame fronts are crossing each-other,
pressure is increasing quickly.
=> KNOCK 35
Illustrating Engine Knock
Desired Combustion Knocking
Spark Plug
Cylinder Head
Flame Front
Fresh
Compressed
Auto Ignition
Mixture
Knocking
Courtesy A. Albinet SiemensVDO 36
Marie-agnès Peraldi-Frati- UNSA 18
Cours Mastere SE / Stream01-EPU-SI 3
Functional complexity
Multiple sampling asynchronous periods
Régulation AirFuel : Lambda sensor,
Gas : vanne EGAS
Sampling periods with variation
Knock sensor acquisition : Hertz
Engine Rotation Speed : CAMShaft rotation
Event-triggered sampling
Epuration du catalyseur à accumulateur : richesse
Knock control : Knock detection; Ignition angle correction.
37
Architectural complexity
Number and heterogeneity of
numerical controllers
Multiplicity of networks
Gear Box
controller
Engine controller
Comfort network
Powertrain
network
38
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 19
Cours Mastere SE / Stream01-EPU-SI 3
Architectural complexity
Synchronization by data handling
Vehicle speed : tachymeter,
Engine torque : induction sensor
Connection between networks (bridge) :
Vehicle speed : engine and brake network, comfort network
Airbag sub-network
Fault tolerance and recovery from errors
Fault recovery :
lost of tachymeter measures => re-emission
Engine torque information + Gear Box => Robotized Gear Box
39
Complexity of interactions between
systems
Co-operation of functionalities : new
functionalities
Light controlled by the windscreen wiper speed and the
ignition key Steering-wheel sensor
Functionalities Inclusion :
ABS => ESP
Anti-lock Braking System
Electronic Stability Program
Yaw-rate sensor
40
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 20
Cours Mastere SE / Stream01-EPU-SI 3
Complexity of interactions between systems
Power train functions
Engine - Brake
Steering - Gear box
Suspension - Clutch
Comfort functions
Continuous wiper speed depending on the weather and the vehicle speed
Volume detection in the cockpit for airbag
Intelligent lighting system
power-assisted steering
Security functions
Detection of hypo vigilance of the driver
Obstacle detection and assistance to braking
41
Complexity of interactions between
systems
Common synchronization mechanisms
Events, commands,
Rendez-vous ….
Standardized access to vehicle data.
Time Stamped data
Blackboard, Mailbox, ports, multi-cast
Freshness of data , temporal consistency
Templates for cooperation
Client-server architecture
42
Marie-agnès Peraldi-Frati- UNSA 21
Cours Mastere SE / Stream01-EPU-SI 3
Complexity of interactions between systems
ECU Computer
C: sensor
A : actuator
Flexibility in the projection
Vehicle
Gamme G,
VersionV,
Year A1
Vehicle
Gamme G,
VersionV,
Year A2
43
CourtoisieJ.P.Elloy - Irccyn
Complexity linked to flexibility
Integration of new services
Evolution of components Flexibility
Hardware optimization
44
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 22
Cours Mastere SE / Stream01-EPU-SI 3
Complexity linked to flexibility
Ad’hoc vehicles Flexibility due to
Variability in the commercial proposal variability
45
Courtoisie J.P.Elloy - Irccyn
Complexity linked to flexibility – diversity
Flexibility in the projection of functions onto hardware .
Diversification of configurations
Access to data independent from the projection
Middleware => data locations are transparent for the
designer.
Causal relations must be ensured : independent
from the projection
Event-driven, data-driven, time-triggered protocols
Management of functions : absence/ presence
Supervision, degraded modes
46
Marie-agnès Peraldi-Frati- UNSA 23
Cours Mastere SE / Stream01-EPU-SI 3
Example of robotique application : Cycab
Electrical Vehicle
Designed for circulation in restricted area
Urban zone
Railway station / airport
University
Touristic zone
Vehicles designed to be used in a safe and simple
mode :
Access with magnetic card
Driving assistance using a joystick
Automatic park and battery energy reload
Availability from one point to another
Multimedia information terminal
47
Cycab equipements
Caméra CCD pour la téléopération
Balises infra rouges
pour la conduite en train
Terminal multimédia
Borne de recharge par Caméra linéaire
induction fixée sur la pour la conduite en train
voirie
batteries + gestionnaire Capteurs ultrasons pour
automatique de charge la détection d’obstacles
Joystick central de commande
Vérin de direction électrique
pour la conduite sécurisée
frein électrique par roue 48
moteur électrique par roue
Marie-agnès Peraldi-Frati- UNSA 24
Cours Mastere SE / Stream01-EPU-SI 3
Cycab architecture
Control and command of 9 motors
An distributed hardware architecture : 3 intelligent nodes
One Steering node that control the joystick and the steering
actuator
twowheel drive nodes that control the wheel drive motors
and brakes
An industrial PC manage the finger touch screen
A MVME162 microcontroller with VxWorks operating
system for implementing control motor laws
Communication between nodes with a fielbusController
Area Network (CAN).
Ultasonics sensors and the CCD camera are connected on
the CAN bus.
49
Cycab architecture
50
Marie-agnès Peraldi-Frati- UNSA 25
Cours Mastere SE / Stream01-EPU-SI 3
Avionic first class concepts
SIL 4
Safety
Dependability
Certification
Redundancy
51
Classical Avionic architecture
A340 Conventional
Avionics
Black boxed functionalities (several LRU Suppliers)
Single emission bus
Isolated functionalities
Multi suppliers for functionalities
52
Marie-agnès Peraldi-Frati- UNSA 26
Cours Mastere SE / Stream01-EPU-SI 3
Classical avionic architecture
53
IMA Avionic architecture
A380
IMA (Integrated Modular Avionic)
Complexity increase
Number of Functionalities
Communication increase
Buses arinc, ethernet commuté full duplex
54
Marie-agnès Peraldi-Frati- UNSA 27
Cours Mastere SE / Stream01-EPU-SI 3
IMA A380 architrecture
55
Design methodology for DRTS
System requirement process
What the system will do : Functional/Non functional
What is the environment
Hierarchical description
Refinement of requirements
Traceability links
Software architecture process
Elicitation of functionalities
Control flow and data flow between functions
Temporal constraints on functions
Control view / software view / implementation view
Reaction in case of errors (Degraded mode of computation, Critical situations :
Fault tolerance : To preserve the operational capacity of the system, Redundancy of
hardware components.
56
Marie-agnès Peraldi-Frati- UNSA 28
Cours Mastere SE / Stream01-EPU-SI 3
Design methodology
Hardware architecture process
Computation resources (CPU, memory, ASIC…)
Communication resources (protocols, interfaces … )
OS and middleware
Implementation process
Allocation
Automatic code generation
Preserve properties
Take into account physical architecture parameters
OS compatible with specifications ?
57
Methodology in automotive control design
Decomposition into different layers
58
Courtoisie J.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 29
Cours Mastere SE / Stream01-EPU-SI 3
Functional layer
Functions and sub-fonctions : what the system do ?
Sensor #1
Actuator #3
F1.1
F2
F1.2
Sensor #2 F1
F1.3
Non-defined
F3 Actuator
Sub-functions :
Can be shared by different functions
59
Software layer : specific components
Projection of functions on
specific software
components
Notion of services
Services are provided by multiple
components
LDM : local drivers for
sensors and actuators
ASC : application software
components
60
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 30
Cours Mastere SE / Stream01-EPU-SI 3
Hardware/Software layers : dedicated
components
Hardware components :
Sensors-Actuators
ECU: Electronical Control
ECU Network
Unit
Network
Software components :
Driver Com-SC ICEM OS-SC
Drivers
Protocols , Exchange system
OS
61
Operational layer
Projection of functional components onto hardware and
software
62
CourtoisieJ.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 31
Cours Mastere SE / Stream01-EPU-SI 3
Operational layer
Control and data flow connections
#1 #3
#6
#2 #4
#5
63
CourtoisieJ.P.Elloy - Irccyn
Deployment phase
Deployment of components into logical tasks
Transformation of logical tasks into
executable tasks
Projection of
synchronizations and
communication onto OS
and network primitives
64
Courtoisie J.P.Elloy - Irccyn
Marie-agnès Peraldi-Frati- UNSA 32
Cours Mastere SE / Stream01-EPU-SI 3
Operational view of an ECU
#2 #4 #3 #6
#5
#2
#1
a b
A #4
#5
B
b a
#6
65
Courtoisie J.P.Elloy - Irccyn
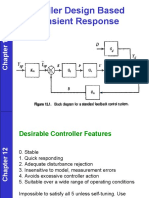
Conclusion
Pros and cons of distributed real-time systems
Definitely distributed !
Modular, fault tolerant, reduction of cabling cost, reconfiguration…
Necessity of “ad’hoc” methodology and tools for taking into account,
Physical characteristics, Determinism, Fault tolerance at the system level
We will focus on communications protocols and middleware in
automotive
Realtime networks
What is the level of service of these networks ?
What are the response of these networks to determinism, fault tolerance,
temporal validation…?
66
Marie-agnès Peraldi-Frati- UNSA 33
Cours Mastere SE / Stream01-EPU-SI 3
Plan of course 2
Realtime Communications
STANDARD
OSEK/VDX standard
AUTOSAR
ISO and realtime
Medium Access Protocols
67
Thanks
Jean pierre Elloy –Professor Irccyn Nantes for its
documentation about automotive design informations
Yvon Trinquet – Professor Irccyn Nantes for
documentation about OSEK/VDX
68
Marie-agnès Peraldi-Frati- UNSA 34
Cours Mastere SE / Stream01-EPU-SI 3
Réferences
• H. Kopetz, Real-Time Systems : Design Principles for Distributed Embedded
Applications, Kluwer, 1997.
• Autosar Automotive Open System Architecture, www.autosar.org
• EAST ADL EAST-EEA Architecture Description Language www.east-
eea.net
69
Trends for the future
Electrical Electronic architecture deployment
1999 2000 2001 2002 2003 2004 2005
Copyright PSA Peugeot Citroen
70
Marie-agnès Peraldi-Frati- UNSA 35
Cours Mastere SE / Stream01-EPU-SI 3
Caractérisation des communications
temps réel
Latence du protocole : c’est l’intervalle de temps entre le
début d’une transmission d’un message au niveau du CNI
(Network Communication Interface)du nœud émetteur et la
réception par le CNI du nœud récepteur.
Jitter :
71
Embedded distributed system
Heat-energy Electrical
Vehicle control energy
control
Supervision
Contrôle de Steering
Execution
Controller châssis control
Brakes Steering Transmission
Suspension Engine Gear box
72
Marie-agnès Peraldi-Frati- UNSA 36
You might also like
- Onda Service Manual SM116x1_G.V02 Table of Contents and Component ReplacementDocument69 pagesOnda Service Manual SM116x1_G.V02 Table of Contents and Component ReplacementSoporte BiomedicoNo ratings yet
- BRKCRS 3142Document92 pagesBRKCRS 3142Daniel VieceliNo ratings yet
- SoC or System On Chip Seminar ReportDocument25 pagesSoC or System On Chip Seminar Reportsojukrishna89% (18)
- FEP Diversity Project Communications OverviewDocument34 pagesFEP Diversity Project Communications OverviewDejanNo ratings yet
- 532 540 PB PDFDocument7 pages532 540 PB PDFvijaya kakaniNo ratings yet
- DAFTAR PERALATAN LAB. SISTEM KENDALIDocument8 pagesDAFTAR PERALATAN LAB. SISTEM KENDALIikaNo ratings yet
- Perdukova PDFDocument6 pagesPerdukova PDFleonardo_melo_costaNo ratings yet
- Sliding Mode Based Observer-Controller Structure For Fault-Resilient Control in DC ServomotorsDocument12 pagesSliding Mode Based Observer-Controller Structure For Fault-Resilient Control in DC ServomotorsviswanadhNo ratings yet
- PredictiveMaintenance ExcavatorDocument4 pagesPredictiveMaintenance ExcavatorDody Rakhmat RamadhanNo ratings yet
- Lecturewk03 PDFDocument21 pagesLecturewk03 PDFNumkang KangNo ratings yet
- L1.2 OverviewDocument7 pagesL1.2 OverviewThuy LinhNo ratings yet
- WIDE AREA MONITORING SYSTEMS(WAMS) - REAL-TIME POWER SYSTEM INSIGHTDocument61 pagesWIDE AREA MONITORING SYSTEMS(WAMS) - REAL-TIME POWER SYSTEM INSIGHTRenuka LokaNo ratings yet
- Quidway® Netengine 5000E Core Router System ArchitectureDocument3 pagesQuidway® Netengine 5000E Core Router System Architecturepaku1980No ratings yet
- Sabp Z 051Document17 pagesSabp Z 051Hassan MokhtarNo ratings yet
- J670 Unirec Service and Commissioning Training: Course GoalDocument3 pagesJ670 Unirec Service and Commissioning Training: Course Goalshubham kulshreshthaNo ratings yet
- How To Select A: Motion Control NetworkDocument3 pagesHow To Select A: Motion Control Networkvicky_yánez_7No ratings yet
- Smart Grid Kumud WadhwaDocument52 pagesSmart Grid Kumud WadhwaPMG Bhuswal ProjectNo ratings yet
- Development of A Mechanical Component Failure DatabaseDocument6 pagesDevelopment of A Mechanical Component Failure DatabaseZakaria RadaNo ratings yet
- Challenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemDocument8 pagesChallenges and Lessons Learned From Commissioning An IEC 61850-90-5 Based Synchrophasor SystemGelareh ShefaeiNo ratings yet
- Micronet™ Plus: ApplicationsDocument4 pagesMicronet™ Plus: ApplicationsMuh RenandaNo ratings yet
- Safety-Critical Systems 2 Requirement Engineering: T-79.5303 Spring 2006 Ilkka HerttuaDocument29 pagesSafety-Critical Systems 2 Requirement Engineering: T-79.5303 Spring 2006 Ilkka HerttuaÖzgürKaymakçıNo ratings yet
- Uster Quantum Expert 3Document8 pagesUster Quantum Expert 3Abdullah Al Masud-006No ratings yet
- Autonomus Monitoring of GridDocument7 pagesAutonomus Monitoring of GridscandalouskNo ratings yet
- E1FLA5 2014 v14n2 136Document9 pagesE1FLA5 2014 v14n2 136tou kaiNo ratings yet
- Case Study: Vibration Trip and Post-Event Analysis With Auto-Associative Neural Networks On A Large Steam TurbineDocument10 pagesCase Study: Vibration Trip and Post-Event Analysis With Auto-Associative Neural Networks On A Large Steam Turbinehegde10No ratings yet
- Mongemo Brochure EnuDocument16 pagesMongemo Brochure EnuAhmad JunaidiNo ratings yet
- MONGEMO Brochure ENUDocument12 pagesMONGEMO Brochure ENUHANIF AKBARNo ratings yet
- An Introduction To Networked Control SystemsDocument11 pagesAn Introduction To Networked Control SystemsleidieuNo ratings yet
- 4 ProgrammingParadigmsDocument48 pages4 ProgrammingParadigmsThanh Võ Thị HoàiNo ratings yet
- E50001-G720-A240-X-4A00 - WS - ENEAS Monitoring - USDocument12 pagesE50001-G720-A240-X-4A00 - WS - ENEAS Monitoring - USJose Rafael CastroNo ratings yet
- SENSOR FAULT TOLERANT CONTROL DESIGN APPLIED TO A WI - 2007 - IFAC Proceedings VDocument8 pagesSENSOR FAULT TOLERANT CONTROL DESIGN APPLIED TO A WI - 2007 - IFAC Proceedings VsmeykelNo ratings yet
- TP-Mechanism BrochureDocument6 pagesTP-Mechanism BrochureAhtsham AhmadNo ratings yet
- Brochure-Pacsystem High AvailabilityDocument8 pagesBrochure-Pacsystem High Availabilityazhan77No ratings yet
- What Is An Operating System? Early Operating Systems: Simple Batch Systems Multiprogrammed Batch SystemsDocument30 pagesWhat Is An Operating System? Early Operating Systems: Simple Batch Systems Multiprogrammed Batch SystemsDeena DayalanNo ratings yet
- 52nd North Carolina Industrial Ventilation ConferenceDocument13 pages52nd North Carolina Industrial Ventilation ConferenceZahir KhiraNo ratings yet
- Ifm Octavis Brochure 2013 ZaDocument12 pagesIfm Octavis Brochure 2013 ZasandeshshivaNo ratings yet
- Smart Motors - Point Machine MonitoringDocument10 pagesSmart Motors - Point Machine MonitoringMartha MiralpeixNo ratings yet
- Stepping Up With SIPLUSDocument12 pagesStepping Up With SIPLUScc_bauNo ratings yet
- Blue EyeDocument29 pagesBlue Eyeapi-3760105100% (23)
- Sabp Z 053Document32 pagesSabp Z 053Hassan MokhtarNo ratings yet
- Real-Time Health Tracking of Headers and PipingDocument13 pagesReal-Time Health Tracking of Headers and PipingOsu Ampawanon100% (1)
- Low Power UPF and VPDocument66 pagesLow Power UPF and VPokokokok1111No ratings yet
- Knezev 2007Document7 pagesKnezev 2007leavemeNo ratings yet
- International Maintenance StandardsDocument13 pagesInternational Maintenance StandardsMouayed ZeadanNo ratings yet
- Session 1. Factory Energy Saving SolutionDocument23 pagesSession 1. Factory Energy Saving SolutionMaintenance PTGSNo ratings yet
- Micom P847: Phasor Measurement and System Stability UnitDocument4 pagesMicom P847: Phasor Measurement and System Stability Unitkessir taouilNo ratings yet
- Sabp Z 060Document27 pagesSabp Z 060Hassan MokhtarNo ratings yet
- Sabp Z 055Document16 pagesSabp Z 055Hassan MokhtarNo ratings yet
- 5.2 From Network Monitoring and Control System To Intelligent Power EquipmentDocument3 pages5.2 From Network Monitoring and Control System To Intelligent Power EquipmentCristina MironNo ratings yet
- Aerospace System EngineeringDocument15 pagesAerospace System EngineeringJacinth PaulNo ratings yet
- Scania: Software Development and TestingDocument33 pagesScania: Software Development and TestingMario Patty100% (2)
- UVM Basics: What To ExpectDocument11 pagesUVM Basics: What To Expectderangula ashokNo ratings yet
- Steer by Wire System Development Using ADocument8 pagesSteer by Wire System Development Using AMikyNo ratings yet
- Technical Product Guide For Tricon SystemsDocument78 pagesTechnical Product Guide For Tricon Systemsbabydoll377No ratings yet
- Monitoring, Analyzing, and Controlling Internet-Scale Systems With ACMEDocument14 pagesMonitoring, Analyzing, and Controlling Internet-Scale Systems With ACMElava bhaiNo ratings yet
- Ieee 7 2020Document4 pagesIeee 7 2020Lakshmi SairaghavaNo ratings yet
- Automatic Tap COntrollerDocument42 pagesAutomatic Tap COntrollerMukeshpanigrahyNo ratings yet
- Sabp Z 058Document22 pagesSabp Z 058Hassan MokhtarNo ratings yet
- Integrated Automation SystemDocument28 pagesIntegrated Automation SystemJeffrey ArandiaNo ratings yet
- Multisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsFrom EverandMultisensor Instrumentation 6σ Design: Defined Accuracy Computer-Integrated Measurement SystemsNo ratings yet
- Semi-Markov Models: Control of Restorable Systems with Latent FailuresFrom EverandSemi-Markov Models: Control of Restorable Systems with Latent FailuresNo ratings yet
- AC Circuit Analysis FundamentalsDocument34 pagesAC Circuit Analysis Fundamentalsmeseret sisayNo ratings yet
- Operational Amplifiers: Chapter-1Document45 pagesOperational Amplifiers: Chapter-1meseret sisayNo ratings yet
- Tvetx Eact533 Chapter1 Lec1Document128 pagesTvetx Eact533 Chapter1 Lec1meseret sisayNo ratings yet
- Measurment 2011 Summer 1Document220 pagesMeasurment 2011 Summer 1meseret sisayNo ratings yet
- LEARNING GUIDE 02 AC DC RectifierDocument27 pagesLEARNING GUIDE 02 AC DC Rectifiermeseret sisayNo ratings yet
- Circuit Analysis Chapter IDocument73 pagesCircuit Analysis Chapter Imeseret sisayNo ratings yet
- Learning Guide 01 Power Semiconductor DevicesDocument43 pagesLearning Guide 01 Power Semiconductor Devicesmeseret sisayNo ratings yet
- CH 2Document49 pagesCH 2meseret sisayNo ratings yet
- Lecture 8 - Ratio FeedforwardDocument35 pagesLecture 8 - Ratio Feedforwardmeseret sisayNo ratings yet
- Federal TVET Institute Electrical Systems WorksheetDocument11 pagesFederal TVET Institute Electrical Systems Worksheetmeseret sisayNo ratings yet
- Control of Multiple-Input, Multiple-Output ProcessesDocument27 pagesControl of Multiple-Input, Multiple-Output Processesmeseret sisayNo ratings yet
- Budgeting and Its Impact On Performance of Commercial Bank (A Case Study On Dicha Branch)Document54 pagesBudgeting and Its Impact On Performance of Commercial Bank (A Case Study On Dicha Branch)meseret sisayNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- EAC533 - LCS - Assignment I QuestionDocument2 pagesEAC533 - LCS - Assignment I Questionmeseret sisayNo ratings yet
- Digital Signal Processing: (Part-I)Document42 pagesDigital Signal Processing: (Part-I)meseret sisayNo ratings yet
- Electrical Machines Vol 2 4thed Ua Bakshi MV BakshiDocument546 pagesElectrical Machines Vol 2 4thed Ua Bakshi MV Bakshimeseret sisayNo ratings yet
- Muliy Prosale 1Document26 pagesMuliy Prosale 1meseret sisayNo ratings yet
- Chapter 4 PPT - Part 2 - HandoutDocument31 pagesChapter 4 PPT - Part 2 - Handoutmeseret sisayNo ratings yet
- DFT Chapter Guide for Digital Signal ProcessingDocument50 pagesDFT Chapter Guide for Digital Signal Processingmeseret sisayNo ratings yet
- The Impact of Financial Management System On Human Resource Utilization (A Case in Gondar Municipality)Document67 pagesThe Impact of Financial Management System On Human Resource Utilization (A Case in Gondar Municipality)meseret sisayNo ratings yet
- Factors Affecting Service Quality of Central Jimma HotelDocument52 pagesFactors Affecting Service Quality of Central Jimma Hotelmeseret sisayNo ratings yet
- Role of MIS in Organizational Decision MakingDocument24 pagesRole of MIS in Organizational Decision Makingmeseret sisayNo ratings yet
- 4 5929252972612552243Document51 pages4 5929252972612552243meseret sisayNo ratings yet
- System-on-Programmable-Chip Design FlowDocument9 pagesSystem-on-Programmable-Chip Design Flowmeseret sisayNo ratings yet
- ch3 Basics of C - IDocument14 pagesch3 Basics of C - Imeseret sisayNo ratings yet
- II Characteristics & Constrints of EsDocument8 pagesII Characteristics & Constrints of Esmeseret sisayNo ratings yet
- LCS Lab Report AnalysisDocument43 pagesLCS Lab Report Analysismeseret sisayNo ratings yet
- Adigrat University: College of Business and EconomicsDocument18 pagesAdigrat University: College of Business and Economicsmeseret sisay100% (1)
- Interfacing Embedded SystemsDocument41 pagesInterfacing Embedded SystemsDeevorak Acuisa100% (1)
- VP Operations Semiconductor Engineering in Silicon Valley CA Resume Jay KumarDocument3 pagesVP Operations Semiconductor Engineering in Silicon Valley CA Resume Jay KumarJayKumar1No ratings yet
- eBox-3310A Windows Embedded CE 6.00 Jump Start GuideDocument128 pageseBox-3310A Windows Embedded CE 6.00 Jump Start Guidesamx86No ratings yet
- Abaco Systems V7768 Manual 202031713269Document94 pagesAbaco Systems V7768 Manual 202031713269tt cheneyNo ratings yet
- Course Outline-SWEG4122-Seminar in Software Engineering - 4Document3 pagesCourse Outline-SWEG4122-Seminar in Software Engineering - 4Tsion MengistuNo ratings yet
- Sri Sairam College of EngineeringDocument37 pagesSri Sairam College of EngineeringLavanya R GowdaNo ratings yet
- NI 9403 5 V/TTL, Bidirectional Digital I/O, 32 CH Module: Last Revised: 2014-11-06 07:14:25.0Document7 pagesNI 9403 5 V/TTL, Bidirectional Digital I/O, 32 CH Module: Last Revised: 2014-11-06 07:14:25.0Fernando GallardoNo ratings yet
- Affiliated Institutions Anna University of Technology Chennai:: Chennai 600 113 Curriculum 2010Document17 pagesAffiliated Institutions Anna University of Technology Chennai:: Chennai 600 113 Curriculum 2010RajaRaman.GNo ratings yet
- Microcontroller & GSM Based ProjectsDocument7 pagesMicrocontroller & GSM Based ProjectsBien MorfeNo ratings yet
- Iot-Based Smart Shopping Cart Using Radio Frequency IdentificationDocument13 pagesIot-Based Smart Shopping Cart Using Radio Frequency IdentificationSahana GuddadNo ratings yet
- IOT Power MonitoringDocument5 pagesIOT Power MonitoringanushkaNo ratings yet
- Microcontroller: HistoryDocument13 pagesMicrocontroller: Historyrainceder100No ratings yet
- MT AUTOSAR Software Design Based On ARM - Course 22 ReservationDocument13 pagesMT AUTOSAR Software Design Based On ARM - Course 22 ReservationFASSAK SAMIRNo ratings yet
- Chapter 4: Memory Built in Chapter 4: Memory Built-In Self-Test Self TestDocument52 pagesChapter 4: Memory Built in Chapter 4: Memory Built-In Self-Test Self TestPradeepRoyalNo ratings yet
- Ec8791-Erts Old QBDocument11 pagesEc8791-Erts Old QBsuresh kumarNo ratings yet
- Embedded Systems and Microprocessor: Sardar Vallabhbhai National Institute ofDocument83 pagesEmbedded Systems and Microprocessor: Sardar Vallabhbhai National Institute ofDarshan ValaNo ratings yet
- Cyber-Physical Systems KA - Draft For Review January 2019Document32 pagesCyber-Physical Systems KA - Draft For Review January 2019Keval DalalNo ratings yet
- Ug - Embedded - Ip Embedded Peripherals IP User Guide PDFDocument571 pagesUg - Embedded - Ip Embedded Peripherals IP User Guide PDFCristian BordaNo ratings yet
- Microcontroller Vs Microcomputer: Key DifferencesDocument40 pagesMicrocontroller Vs Microcomputer: Key DifferencesNgaa SiemensNo ratings yet
- Aopen Des4100Document2 pagesAopen Des4100Marisagarcia2014No ratings yet
- Tms320c54x DSP Ccs TutorialDocument126 pagesTms320c54x DSP Ccs TutorialRaul RosaNo ratings yet
- Project Report On Embedded SystemsDocument14 pagesProject Report On Embedded SystemsshashankNo ratings yet
- C++ Developer with Embedded and ARM ExperienceDocument3 pagesC++ Developer with Embedded and ARM ExperiencejatonfireNo ratings yet
- Lecture 1 - Introduction To ARMDocument30 pagesLecture 1 - Introduction To ARMAnonymous JZSeM82IbVNo ratings yet
- 2011 - A HiL Test Bench For Verification and Validation Purposes of Model-Based Developed Applications Using Simulink and OPC DA Technology PDFDocument6 pages2011 - A HiL Test Bench For Verification and Validation Purposes of Model-Based Developed Applications Using Simulink and OPC DA Technology PDFlimakmNo ratings yet
- Bit BakeDocument32 pagesBit Bakedeweyev699No ratings yet
- Embedded SystemDocument13 pagesEmbedded Systemjigar16789100% (1)
- U C51Document138 pagesU C51coep05No ratings yet
- Satchwell Product CatalogDocument36 pagesSatchwell Product CatalogErcarErcarNo ratings yet