You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Environmental Impact Assessment and Management PlanDocument70 pagesEnvironmental Impact Assessment and Management PlanWael AlmahdiNo ratings yet
- Fire Detection and Alarm SystemDocument30 pagesFire Detection and Alarm Systemooluwaseyi100% (1)
- Denon AVR-X530BT Service ManualDocument102 pagesDenon AVR-X530BT Service ManuallouiektcNo ratings yet
- Modelling Contracting Procedure and The Concept of The Service Portfolio For Finnish Municipalities Using SADT TechniqueDocument12 pagesModelling Contracting Procedure and The Concept of The Service Portfolio For Finnish Municipalities Using SADT TechniqueWael AlmahdiNo ratings yet
- W. I. Zidan and I. M. Elseaidy Atomic Energy Authority of Egypt, ETRR-2, Inshas 13759, Cairo, EgyptDocument9 pagesW. I. Zidan and I. M. Elseaidy Atomic Energy Authority of Egypt, ETRR-2, Inshas 13759, Cairo, EgyptWael AlmahdiNo ratings yet
- Learn About Quality: What Is A Flowchart?Document3 pagesLearn About Quality: What Is A Flowchart?Wael AlmahdiNo ratings yet
- Food Hygiene: © Food - A Fact of Life 2009Document23 pagesFood Hygiene: © Food - A Fact of Life 2009Wael AlmahdiNo ratings yet
- Havac ListDocument65 pagesHavac ListWael AlmahdiNo ratings yet
- List of The Scholarships of The Government of The SR Oda 2022 2023Document7 pagesList of The Scholarships of The Government of The SR Oda 2022 2023Wael AlmahdiNo ratings yet
- Academic Offer and Specific Requirements - Master 2022Document15 pagesAcademic Offer and Specific Requirements - Master 2022Wael AlmahdiNo ratings yet
- Braille To Text Conversion Using Slot Sensorized Hand GloveDocument5 pagesBraille To Text Conversion Using Slot Sensorized Hand GloveWael AlmahdiNo ratings yet
- Process Based Agile Supply Chain Model According To BPR and IDEF 3.0 ConceptsDocument22 pagesProcess Based Agile Supply Chain Model According To BPR and IDEF 3.0 ConceptsWael AlmahdiNo ratings yet
- Genetic Algorithm and Time Petri Net Are New Approaches For Path Planning and Co-Ordination Among Sub-Modules in A Mobile RobotDocument10 pagesGenetic Algorithm and Time Petri Net Are New Approaches For Path Planning and Co-Ordination Among Sub-Modules in A Mobile RobotWael AlmahdiNo ratings yet
- Curriculum Vitae Samuel SomotDocument3 pagesCurriculum Vitae Samuel SomotWael AlmahdiNo ratings yet
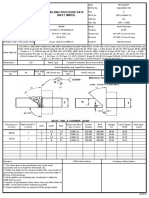
- Welding Procedure Data Sheet (WPDS) Weldproc Demo: Joint Preparation and Layer/Pass SequenceDocument1 pageWelding Procedure Data Sheet (WPDS) Weldproc Demo: Joint Preparation and Layer/Pass SequenceWael AlmahdiNo ratings yet
- BloodDocument7 pagesBloodWael AlmahdiNo ratings yet
- Environmental Impact Assessment and Management PlanDocument6 pagesEnvironmental Impact Assessment and Management PlanWael AlmahdiNo ratings yet
- (For Details, Please See The Call For Applications) : Symbols You Must Upload It Until 15 JanuaryDocument5 pages(For Details, Please See The Call For Applications) : Symbols You Must Upload It Until 15 JanuaryWael AlmahdiNo ratings yet
- Maximum Voluntary Static Work: Industrial Engineering Department Human Activities Laboratory Experiment 3Document1 pageMaximum Voluntary Static Work: Industrial Engineering Department Human Activities Laboratory Experiment 3Wael AlmahdiNo ratings yet
- Experiment 5Document3 pagesExperiment 5Benedict DiwaNo ratings yet
- Operator / Service Manual: European RepresentativeDocument108 pagesOperator / Service Manual: European Representativehüseyin vururNo ratings yet
- Excitation Module: Features Worldwide Product SupportDocument5 pagesExcitation Module: Features Worldwide Product SupportIBRAHIM AL-SURAIHINo ratings yet
- Fundamentals of Motor Control: Industrial & Power Conversion TrainingDocument56 pagesFundamentals of Motor Control: Industrial & Power Conversion TrainingPhu, Le HuuNo ratings yet
- PCB Designing LPDocument3 pagesPCB Designing LPGlezelBayubayNo ratings yet
- Comtech IFS REV1.4Document1 pageComtech IFS REV1.4marcoNo ratings yet
- CH 04 Transistor BiasingDocument30 pagesCH 04 Transistor BiasingHatem DheerNo ratings yet
- BT137 Series: 8A TriacDocument4 pagesBT137 Series: 8A TriacRenso RodriguezNo ratings yet
- AP Economics - Summer Assignment 2023-2024Document6 pagesAP Economics - Summer Assignment 2023-2024Sara SalemNo ratings yet
- MMG 1070/. TS: Eddy Current Displacement SensorDocument2 pagesMMG 1070/. TS: Eddy Current Displacement Sensorimant197812gmail.comNo ratings yet
- Lab 5 - SIGEx Lab Manual SamplingDocument18 pagesLab 5 - SIGEx Lab Manual SamplingSoughah AlkendiNo ratings yet
- Moving Iron Instruments Voltmeter and Ammeter EepDocument5 pagesMoving Iron Instruments Voltmeter and Ammeter EepakashNo ratings yet
- CO-PO Attainment - Sample PDFDocument3 pagesCO-PO Attainment - Sample PDFyelhankaNo ratings yet
- Mobilegenius BrochureDocument4 pagesMobilegenius BrochureOscar CorreaNo ratings yet
- TSV Stress Testing and Modeling For 3D IC ApplicationsDocument4 pagesTSV Stress Testing and Modeling For 3D IC Applications詹益誠No ratings yet
- Project PPT 1Document13 pagesProject PPT 1Anoop SinghNo ratings yet
- UART Vs I2C Vs SPIDocument49 pagesUART Vs I2C Vs SPIKishore KishuNo ratings yet
- Antenna Simulation Horn Pyr PDFDocument4 pagesAntenna Simulation Horn Pyr PDFEshwarNo ratings yet
- TS4000H Manual PDFDocument105 pagesTS4000H Manual PDFarunenggNo ratings yet
- Electro-Pneumatic SystemDocument10 pagesElectro-Pneumatic Systemfarhan jalaludinNo ratings yet
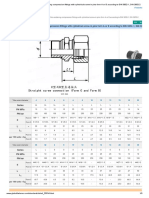
- DIN 2353 - 2013non-Soldering Compression Fittings With Cylindrical Screw-In Pins Form A or B According To DIN 3852-1, DIN 3852-2Document3 pagesDIN 2353 - 2013non-Soldering Compression Fittings With Cylindrical Screw-In Pins Form A or B According To DIN 3852-1, DIN 3852-2Er.Amritpal SinghNo ratings yet
- RMB.e and RCB.e Technical Data: Rating (A) 50 100 150 InputDocument1 pageRMB.e and RCB.e Technical Data: Rating (A) 50 100 150 InputBadian ewNo ratings yet
- UV-VIS Spectrophotometry: A Brief Background To SpectrophotometryDocument15 pagesUV-VIS Spectrophotometry: A Brief Background To SpectrophotometrySiddh BhattNo ratings yet
- (RC-U007-DA) Chryss Universal TV RemoteDocument5 pages(RC-U007-DA) Chryss Universal TV RemoteDionne Sebastian Doromal100% (1)
- 12th Unit 4 Saiveera Physics MaterialDocument16 pages12th Unit 4 Saiveera Physics Material19 Vasanth PurushothamanNo ratings yet
- New Exciting Yaesu Field Gear: Hf/50 MHZ 100 W All Mode TransceiverDocument2 pagesNew Exciting Yaesu Field Gear: Hf/50 MHZ 100 W All Mode TransceiverAdrian SultanoiuNo ratings yet
- Module 2 ExmplesDocument8 pagesModule 2 Exmplesexplainer02222No ratings yet
- Trimble-GS820 UserGde GM820 ENG Rev2020Aug 57708Document135 pagesTrimble-GS820 UserGde GM820 ENG Rev2020Aug 57708gabri1992No ratings yet