You might also like
- Simultaneous Localization and Mapping of Mobile Robot With Research and ImplementationDocument4 pagesSimultaneous Localization and Mapping of Mobile Robot With Research and ImplementationAhmad KhanNo ratings yet
- Cooperative Localization Approach For Multi-Robot Systems Based On State Estimation Error CompensationDocument13 pagesCooperative Localization Approach For Multi-Robot Systems Based On State Estimation Error CompensationKarl AmadoNo ratings yet
- Thrun 03 eDocument12 pagesThrun 03 erecoNo ratings yet
- D Lite: Sven Koenig Maxim LikhachevDocument8 pagesD Lite: Sven Koenig Maxim Likhachevnasi_balapNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingVishalParekhNo ratings yet
- A Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingDocument8 pagesA Real-Time Algorithm For Mobile Robot Mapping With Applications To Multi-Robot and 3D MappingjayachandradbzNo ratings yet
- Roadmap-Based Planning in Human-Robot Collaboration EnvironmentsDocument7 pagesRoadmap-Based Planning in Human-Robot Collaboration EnvironmentsZahid IqbalNo ratings yet
- 2005 Path Planning Protocol For Collaborative Multi-Robot SystemsDocument6 pages2005 Path Planning Protocol For Collaborative Multi-Robot SystemsEx6TenZNo ratings yet
- International Journal of Engineering Research and Development (IJERD)Document11 pagesInternational Journal of Engineering Research and Development (IJERD)IJERDNo ratings yet
- Implementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapDocument9 pagesImplementation of Informed RRT - On A Pre-Mapped Octomap Generated by RTAB MapMuhammad AdhipatiunusNo ratings yet
- Comparative Analysis of Mobile Robot Localization Methods Based On Proprioceptive and Exteroceptive SensorsDocument23 pagesComparative Analysis of Mobile Robot Localization Methods Based On Proprioceptive and Exteroceptive SensorsMogdad SalahNo ratings yet
- Deep GaitDocument8 pagesDeep GaitGhanshyam s.nairNo ratings yet
- Image Encryption With Fusion of Two Maps: Yannick Abanda, Alain Tiedeu, Guillaume KomDocument28 pagesImage Encryption With Fusion of Two Maps: Yannick Abanda, Alain Tiedeu, Guillaume KomYannick AbandaNo ratings yet
- 2009 Lotos BssaDocument21 pages2009 Lotos BssaIstván TörökNo ratings yet
- Compusoft, 3 (6), 825-830 PDFDocument6 pagesCompusoft, 3 (6), 825-830 PDFIjact EditorNo ratings yet
- An Efficient FastSLAM Algorithm For Generating Maps of Large-Scale CyclicDocument7 pagesAn Efficient FastSLAM Algorithm For Generating Maps of Large-Scale CycliceetahaNo ratings yet
- 3D Localization, Mapping and Path Planning For Search and Rescue OperationsDocument3 pages3D Localization, Mapping and Path Planning For Search and Rescue OperationsbookeepaNo ratings yet
- Fast, On-Line Learning of Globally Consistent MapsDocument14 pagesFast, On-Line Learning of Globally Consistent MapssrikumarauNo ratings yet
- AStar 1Document11 pagesAStar 1truhtNo ratings yet
- A Development of Network Topology of Wireless Packet Communications For Disaster Situation With Genetic Algorithms or With Dijkstra'sDocument5 pagesA Development of Network Topology of Wireless Packet Communications For Disaster Situation With Genetic Algorithms or With Dijkstra'sPushpa Mohan RajNo ratings yet
- Evaluation of A Factorized ICP Based Method For 3D Mapping and LocalizationDocument9 pagesEvaluation of A Factorized ICP Based Method For 3D Mapping and LocalizationIan MedeirosNo ratings yet
- Thrun Map3d PDFDocument8 pagesThrun Map3d PDFMurad QəhramanovNo ratings yet
- Traceroute PDFDocument21 pagesTraceroute PDFDiana CienduaNo ratings yet
- Monte Carlo Localisation For Mobile Robots: 31st of May, 2006Document16 pagesMonte Carlo Localisation For Mobile Robots: 31st of May, 2006api-19505025No ratings yet
- Outdoor Robot Navigation Using Gmapping Based SLAM AlgorithmDocument6 pagesOutdoor Robot Navigation Using Gmapping Based SLAM AlgorithmfpasanfiverNo ratings yet
- PHA : Finding The Shortest Path With A in An Unknown Physical EnvironmentDocument40 pagesPHA : Finding The Shortest Path With A in An Unknown Physical EnvironmentoisjNo ratings yet
- Referensi TrilaterasiDocument15 pagesReferensi TrilaterasiAlf DzoelkiefliNo ratings yet
- Motion Planning For Multiple Mobile Robot Systems Using Dynamic NetworksDocument6 pagesMotion Planning For Multiple Mobile Robot Systems Using Dynamic Networkseocv20No ratings yet
- Model Based Kalman Filter Mobil - Edouard IvanjkoDocument34 pagesModel Based Kalman Filter Mobil - Edouard Ivanjkonikolics.trashNo ratings yet
- Energies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterDocument31 pagesEnergies: FPGA Implementation of Homotopic Path Planning Method With Automatic Assignment of Repulsion ParameterMario CalderonNo ratings yet
- A Mobile Robot Path Planning Using Genetic Algorithm in Static EnvironmentDocument4 pagesA Mobile Robot Path Planning Using Genetic Algorithm in Static EnvironmentMikel NanushiNo ratings yet
- Fuzzy Clustering For Improved PositioningDocument12 pagesFuzzy Clustering For Improved PositioningijiteNo ratings yet
- Elastic ForceDocument4 pagesElastic ForceAkash AcharyaNo ratings yet
- A LSTM Neural Network Applied To Mobile Robots Path PlanningDocument6 pagesA LSTM Neural Network Applied To Mobile Robots Path PlanningVarun AgarwalNo ratings yet
- Path Planning For Unmanned Ground Vehicle: Fethi DEMIM, Kahina LOUADJ, Abdelkrim NEMRADocument3 pagesPath Planning For Unmanned Ground Vehicle: Fethi DEMIM, Kahina LOUADJ, Abdelkrim NEMRAAmal KekliNo ratings yet
- Sensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentDocument18 pagesSensor-Based Navigation of A Mobile Robot in An Indoor EnvironmentGanesh Kumar ArumugamNo ratings yet
- Petri Net Plans: Ziparo@dis - Uniroma1.itDocument22 pagesPetri Net Plans: Ziparo@dis - Uniroma1.itjfh234No ratings yet
- An Incremental Viterbi Algorithm For Large Sequence Hidden Markov ModelsDocument7 pagesAn Incremental Viterbi Algorithm For Large Sequence Hidden Markov Modelsjason bobbinNo ratings yet
- Isise 2012 59Document4 pagesIsise 2012 59Duy KhổngNo ratings yet
- Performance Analysis of Space Suirvellance and Tracking Systems in LEODocument10 pagesPerformance Analysis of Space Suirvellance and Tracking Systems in LEOFrancisco CarvalhoNo ratings yet
- New Resampling Algorithm For Particle Filter Localization For Mobile Robot With 3 Ultrasonic Sonar SensorDocument6 pagesNew Resampling Algorithm For Particle Filter Localization For Mobile Robot With 3 Ultrasonic Sonar SensorWidyawardana AdiprawitaNo ratings yet
- Paper 597Document6 pagesPaper 597mezianeNo ratings yet
- Parallel Implementation of An Ant Colony Optimization Metaheuristic With OpenmpDocument7 pagesParallel Implementation of An Ant Colony Optimization Metaheuristic With OpenmpDIONLY oneNo ratings yet
- Bitbots: Simple Robots Solving Complex Tasks: Anna Yershova Benjam in Tovar Robert Ghrist Steven M. LavalleDocument6 pagesBitbots: Simple Robots Solving Complex Tasks: Anna Yershova Benjam in Tovar Robert Ghrist Steven M. LavalleSteve LaValleNo ratings yet
- Exact Cell Decomposition of Arrangements Used For Path Planning in RoboticsDocument14 pagesExact Cell Decomposition of Arrangements Used For Path Planning in RoboticsAli BabarNo ratings yet
- Experimental Comparison of Extended Kalman and Particle Filter in Mobile Robotic LocalizationDocument6 pagesExperimental Comparison of Extended Kalman and Particle Filter in Mobile Robotic LocalizationDong HoangNo ratings yet
- Sampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1Document20 pagesSampling Based Robot Motion Planning: Dept. of Ece, Bgsit 2015page 1punithNo ratings yet
- Cap1 PDFDocument27 pagesCap1 PDFJose ArellanoNo ratings yet
- A Parallel Ant Colony Optimization Algorithm With GPU-Acceleration Based On All-In-Roulette SelectionDocument5 pagesA Parallel Ant Colony Optimization Algorithm With GPU-Acceleration Based On All-In-Roulette SelectionJie FuNo ratings yet
- Optimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian ParberryDocument10 pagesOptimal Path Planning For Mobile Robot Navigation: Gene Eu Jan, Ki Yin Chang, and Ian Parberrysaeed khodayganNo ratings yet
- Jitter Based Delay Boundary Prediction of Wide-Area NetworksDocument14 pagesJitter Based Delay Boundary Prediction of Wide-Area NetworksebudhyNo ratings yet
- Meeting RecognisionDocument4 pagesMeeting RecognisionpeterijNo ratings yet
- RT-RRT : A Real-Time Path Planning Algorithm Based On RRT : Kourosh Naderi Joose Rajam Aki Perttu H Am Al AinenDocument6 pagesRT-RRT : A Real-Time Path Planning Algorithm Based On RRT : Kourosh Naderi Joose Rajam Aki Perttu H Am Al AinenPramod KumarNo ratings yet
- Path Planning Algorithms of Sweeping RobotsDocument7 pagesPath Planning Algorithms of Sweeping Robotsfaith_khp73301No ratings yet
- ROS-based Mapping, Localization and Autonomous Navigation Using A Pioneer 3-DX Robot and Their Relevant IssuesDocument5 pagesROS-based Mapping, Localization and Autonomous Navigation Using A Pioneer 3-DX Robot and Their Relevant Issuesbootscats100% (1)
- Coordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchDocument32 pagesCoordinated Motion Planning: Reconfiguring A Swarm of Labeled Robots With Bounded StretchjayaheNo ratings yet
- Gris Etti 07 TroDocument12 pagesGris Etti 07 Trodogukan duranNo ratings yet
- An Improved Genetic Algorithm With ADocument7 pagesAn Improved Genetic Algorithm With AijcseitjournalNo ratings yet
- Improving Grid-Based SLAM With Rao-Blackwellized Particle Filters by Adaptive Proposals and Selective ResamplingDocument6 pagesImproving Grid-Based SLAM With Rao-Blackwellized Particle Filters by Adaptive Proposals and Selective Resamplingdogukan duranNo ratings yet
- Modelling Contracting Procedure and The Concept of The Service Portfolio For Finnish Municipalities Using SADT TechniqueDocument12 pagesModelling Contracting Procedure and The Concept of The Service Portfolio For Finnish Municipalities Using SADT TechniqueWael AlmahdiNo ratings yet
- Food Hygiene: © Food - A Fact of Life 2009Document23 pagesFood Hygiene: © Food - A Fact of Life 2009Wael AlmahdiNo ratings yet
- Learn About Quality: What Is A Flowchart?Document3 pagesLearn About Quality: What Is A Flowchart?Wael AlmahdiNo ratings yet
- W. I. Zidan and I. M. Elseaidy Atomic Energy Authority of Egypt, ETRR-2, Inshas 13759, Cairo, EgyptDocument9 pagesW. I. Zidan and I. M. Elseaidy Atomic Energy Authority of Egypt, ETRR-2, Inshas 13759, Cairo, EgyptWael AlmahdiNo ratings yet
- Havac ListDocument65 pagesHavac ListWael AlmahdiNo ratings yet
- List of The Scholarships of The Government of The SR Oda 2022 2023Document7 pagesList of The Scholarships of The Government of The SR Oda 2022 2023Wael AlmahdiNo ratings yet
- Process Based Agile Supply Chain Model According To BPR and IDEF 3.0 ConceptsDocument22 pagesProcess Based Agile Supply Chain Model According To BPR and IDEF 3.0 ConceptsWael AlmahdiNo ratings yet
- Academic Offer and Specific Requirements - Master 2022Document15 pagesAcademic Offer and Specific Requirements - Master 2022Wael AlmahdiNo ratings yet
- Curriculum Vitae Samuel SomotDocument3 pagesCurriculum Vitae Samuel SomotWael AlmahdiNo ratings yet
- Braille To Text Conversion Using Slot Sensorized Hand GloveDocument5 pagesBraille To Text Conversion Using Slot Sensorized Hand GloveWael AlmahdiNo ratings yet
- BloodDocument7 pagesBloodWael AlmahdiNo ratings yet
- Environmental Impact Assessment and Management PlanDocument70 pagesEnvironmental Impact Assessment and Management PlanWael AlmahdiNo ratings yet
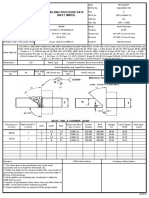
- Welding Procedure Data Sheet (WPDS) Weldproc Demo: Joint Preparation and Layer/Pass SequenceDocument1 pageWelding Procedure Data Sheet (WPDS) Weldproc Demo: Joint Preparation and Layer/Pass SequenceWael AlmahdiNo ratings yet
- Maximum Voluntary Static Work: Industrial Engineering Department Human Activities Laboratory Experiment 3Document1 pageMaximum Voluntary Static Work: Industrial Engineering Department Human Activities Laboratory Experiment 3Wael AlmahdiNo ratings yet
- (For Details, Please See The Call For Applications) : Symbols You Must Upload It Until 15 JanuaryDocument5 pages(For Details, Please See The Call For Applications) : Symbols You Must Upload It Until 15 JanuaryWael AlmahdiNo ratings yet
- Environmental Impact Assessment and Management PlanDocument6 pagesEnvironmental Impact Assessment and Management PlanWael AlmahdiNo ratings yet
- ISC Class 12 Psychology Syllabus 2023 24Document5 pagesISC Class 12 Psychology Syllabus 2023 24ED GENo ratings yet
- Okun y Kantrowitz - Cap4 - Stage1Document15 pagesOkun y Kantrowitz - Cap4 - Stage1AntoniettaNo ratings yet
- IDEA TemplateDocument2 pagesIDEA TemplateJay100% (1)
- Brain Based Learning Teaching The Way... Z LibraryDocument241 pagesBrain Based Learning Teaching The Way... Z LibraryJOANNA REAN SAGUIRELNo ratings yet
- Action Plan in Remedial InterventionDocument7 pagesAction Plan in Remedial InterventionDorothy Jean100% (2)
- Ch1 Exploring How Texts Work 2ndDocument8 pagesCh1 Exploring How Texts Work 2ndRusty LantacaNo ratings yet
- Year 2 English Yearly Scheme of Work 2012 (Semester 1)Document17 pagesYear 2 English Yearly Scheme of Work 2012 (Semester 1)Anonymous NTGlzmcAYNo ratings yet
- New BIT Structure For 081 AboveDocument17 pagesNew BIT Structure For 081 Aboveعلي برادةNo ratings yet
- INSET 2024 Matrix 1 1 1Document6 pagesINSET 2024 Matrix 1 1 1Macario estarjerasNo ratings yet
- DLL - Mapeh 5 - Q3 - W2 2023-2024Document7 pagesDLL - Mapeh 5 - Q3 - W2 2023-2024moshavila32509No ratings yet
- I. Family Heirloom: RHIST Learning Evidence 1: Family Heirloom As A Primary SourceDocument2 pagesI. Family Heirloom: RHIST Learning Evidence 1: Family Heirloom As A Primary SourceAngelie FloraNo ratings yet
- Whay Do We Mean by Reading Readines 21.47.19Document2 pagesWhay Do We Mean by Reading Readines 21.47.19Andrea Josefa SotoNo ratings yet
- Hannah Enanod - WS 7 Meaning of CurriculumDocument2 pagesHannah Enanod - WS 7 Meaning of CurriculumHannah EnanodNo ratings yet
- Business Communication Note PDFDocument72 pagesBusiness Communication Note PDFRafi Mohammed0% (1)
- Lecture 1 - Curriculum ProcessDocument3 pagesLecture 1 - Curriculum Processapi-373153794% (17)
- Remote Delivery of Related Learning Experiences For Medical Technology: Cases of Teachers and Students in Three (3) Higher Education InstitutionsDocument9 pagesRemote Delivery of Related Learning Experiences For Medical Technology: Cases of Teachers and Students in Three (3) Higher Education InstitutionsPsychology and Education: A Multidisciplinary JournalNo ratings yet
- List of ManualsDocument4 pagesList of ManualsRaymund P. CruzNo ratings yet
- Deped Order 36Document22 pagesDeped Order 36Michael GreenNo ratings yet
- The Cleveland Scale For Activities of DaDocument14 pagesThe Cleveland Scale For Activities of DaJesena SalveNo ratings yet
- Article AdaptativeProjectManagement PDFDocument8 pagesArticle AdaptativeProjectManagement PDFMohammad DoomsNo ratings yet
- Learning Style Inventory: Scoring Procedures DirectionsDocument3 pagesLearning Style Inventory: Scoring Procedures DirectionsLannie P. RamosNo ratings yet
- Spatial Perspective in The United StatesDocument7 pagesSpatial Perspective in The United Statesapi-251996345No ratings yet
- Marzano Focused Model: Lesson PlanDocument5 pagesMarzano Focused Model: Lesson Planapi-325030256No ratings yet
- Time, Temporality, and History in Process Organization StudiesDocument324 pagesTime, Temporality, and History in Process Organization StudiesGust100% (1)
- Aiml 5 Units NotesDocument134 pagesAiml 5 Units NotesAnand KedhariNo ratings yet
- Module 20 Social Cognitive & Trait TheoriesDocument24 pagesModule 20 Social Cognitive & Trait TheoriesKoha TrầnNo ratings yet
- Criterion B Report Template Year 4-5Document4 pagesCriterion B Report Template Year 4-5rami abu hadidNo ratings yet
- Asch 1951 Jenness 1932 Sheriff 1936Document1 pageAsch 1951 Jenness 1932 Sheriff 1936FolorunshoEmNo ratings yet
- Ye Mystic Krewe of Historical RevisionisDocument304 pagesYe Mystic Krewe of Historical RevisionisAsanijNo ratings yet
- Davidson On The Very Idea of A Conceptual Scheme Handout PDFDocument2 pagesDavidson On The Very Idea of A Conceptual Scheme Handout PDFmateustg0% (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerFrom EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerRating: 4 out of 5 stars4/5 (4)
- Architects of Intelligence: The truth about AI from the people building itFrom EverandArchitects of Intelligence: The truth about AI from the people building itRating: 4.5 out of 5 stars4.5/5 (21)
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (82)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- Python Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionFrom EverandPython Machine Learning - Third Edition: Machine Learning and Deep Learning with Python, scikit-learn, and TensorFlow 2, 3rd EditionRating: 5 out of 5 stars5/5 (2)