You might also like
- Micro1 07E Bin OperatDocument23 pagesMicro1 07E Bin OperatMiguelGonzalezNo ratings yet
- TIA PRO1 06 Binary Operations 2 enDocument19 pagesTIA PRO1 06 Binary Operations 2 endikiNo ratings yet
- TIA PRO1 08 Binary Operations 2 enDocument19 pagesTIA PRO1 08 Binary Operations 2 enEmilio MonterichelNo ratings yet
- TIA PRO1 06 Binary Operations 1Document25 pagesTIA PRO1 06 Binary Operations 1Emilio MonterichelNo ratings yet
- Training Area Setup With S7-1200 ......................................................................... 2-2Document6 pagesTraining Area Setup With S7-1200 ......................................................................... 2-2Will UnocuatrosieteNo ratings yet
- Training Area Setup With S7-1200 ......................................................................... 2-2Document6 pagesTraining Area Setup With S7-1200 ......................................................................... 2-2MiguelGonzalezNo ratings yet
- TIA PRO1 10 Digital OperationsDocument34 pagesTIA PRO1 10 Digital OperationsEmilio MonterichelNo ratings yet
- Analisis de Nodos (Práctica)Document11 pagesAnalisis de Nodos (Práctica)César HernándezNo ratings yet
- 614-20022-00 (3-6KW) SearchableDocument18 pages614-20022-00 (3-6KW) SearchableKhaled BellegdyNo ratings yet
- Tia Pro1 12 Connecting HmiDocument27 pagesTia Pro1 12 Connecting HmiEmilio MonterichelNo ratings yet
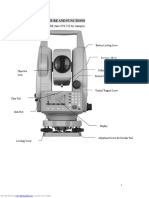
- Sanding STS-750 Series Total Station Owners ManualDocument214 pagesSanding STS-750 Series Total Station Owners ManualRamez Bou-RizkNo ratings yet
- PL 950 A EnglishDocument15 pagesPL 950 A Englishgeorge stanley paceteNo ratings yet
- Fargo Man 8025m UserDocument423 pagesFargo Man 8025m UserashenifalehuNo ratings yet
- CNC 8025 GP, M, MS: New FeaturesDocument423 pagesCNC 8025 GP, M, MS: New Featuresjean bartNo ratings yet
- Lab 7: Op Amps II: Chapter 7LDocument11 pagesLab 7: Op Amps II: Chapter 7LSubhaNo ratings yet
- Capitulo 3Document15 pagesCapitulo 3Juan GonzalesNo ratings yet
- A12 ManualDocument12 pagesA12 ManualCristhian TaipeNo ratings yet
- Faculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Document7 pagesFaculty of Engineering: Circuits and Signals EEL 2186 TRIMESTER 1 (2014/2015)Rameshkumar JayaramanNo ratings yet
- Lab 8 and 9Document8 pagesLab 8 and 9SARANG ABBASINo ratings yet
- 6-TIA MICRO1 06E ProgBlockEditorDocument35 pages6-TIA MICRO1 06E ProgBlockEditorFernando LeonNo ratings yet
- Danang University of Science and Technology: Instructor: Nguyen Tri Bang Class: 15ECE2 Group Members: Vo Hoang ChuongDocument12 pagesDanang University of Science and Technology: Instructor: Nguyen Tri Bang Class: 15ECE2 Group Members: Vo Hoang ChuongBin BinNo ratings yet
- Precaution 3. Product Introduction: JWI-700CDocument20 pagesPrecaution 3. Product Introduction: JWI-700CDiego TorresNo ratings yet
- Masterk Instructions ProgrammingDocument268 pagesMasterk Instructions Programmingmkspenang183055% (11)
- Eva 525HF Calibration PDFDocument9 pagesEva 525HF Calibration PDFRaniel Aris LigsayNo ratings yet
- SDG1000X QuickStart QS0201X-E01BDocument10 pagesSDG1000X QuickStart QS0201X-E01BLa Ga Ta TitiNo ratings yet
- Unca Csci 255 Exam 3 Fall 2011: If You Want Partial Credit For Imperfect Answers, Explain The Reason For Your Answer!Document6 pagesUnca Csci 255 Exam 3 Fall 2011: If You Want Partial Credit For Imperfect Answers, Explain The Reason For Your Answer!EmiNo ratings yet
- PW 6 WithanswersheetDocument11 pagesPW 6 WithanswersheetAiman 4444No ratings yet
- Lab 10 InstructionDocument5 pagesLab 10 InstructionVadimNo ratings yet
- 15 Operation: 15.1 Operating DisplaysDocument9 pages15 Operation: 15.1 Operating DisplaysFederico CastiellaNo ratings yet
- Elec Ns U ManualDocument35 pagesElec Ns U ManualSenares ArdoNo ratings yet
- (CIMON) PLC-S CPU Built-In Positioning User ManualDocument60 pages(CIMON) PLC-S CPU Built-In Positioning User ManualRolando Nunez del Prado B.No ratings yet
- Ocs ZS5Document9 pagesOcs ZS5sebastien.rocherNo ratings yet
- CAN OpenDocument111 pagesCAN OpenStelian CrisanNo ratings yet
- Chequeador GarvensDocument29 pagesChequeador GarvensJorge Tovar Valencia100% (2)
- FBD ExamplesDocument13 pagesFBD Exampleskalpi99999No ratings yet
- Canon F-10 InstructionsDocument16 pagesCanon F-10 Instructionsd_hessNo ratings yet
- DW-1500/ DW-2000 Operation Manual: Laval Underground SurveysDocument33 pagesDW-1500/ DW-2000 Operation Manual: Laval Underground SurveysMario SaukolyNo ratings yet
- U18ec038 - Ei - Lab 1Document7 pagesU18ec038 - Ei - Lab 1Timir PatelNo ratings yet
- Experiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelDocument7 pagesExperiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelTimir PatelNo ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073AvinashNo ratings yet
- Adt-7000-Im-09 (KM Chan 11.02.2024)Document22 pagesAdt-7000-Im-09 (KM Chan 11.02.2024)ChanKamMinNo ratings yet
- PLC Programming Rules #1 - 3 PLC Programming Rules #4 - 5Document4 pagesPLC Programming Rules #1 - 3 PLC Programming Rules #4 - 5Harish GouthamNo ratings yet
- Chapter 1 Challenges: The Arduino ModuleDocument7 pagesChapter 1 Challenges: The Arduino Moduleapi-357698220No ratings yet
- SV 82Document31 pagesSV 82yanto heriNo ratings yet
- Orcad Capture Release 15.7: Robert J. Hofinger Purdue University 1/15/08Document38 pagesOrcad Capture Release 15.7: Robert J. Hofinger Purdue University 1/15/08serhatbNo ratings yet
- Sesion 4Document5 pagesSesion 4gaosrock1234No ratings yet
- Lab 2 - Flashlight Follower: ObjectiveDocument6 pagesLab 2 - Flashlight Follower: ObjectiveChristian OrtizNo ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078AvinashNo ratings yet
- Functional Descr AIC01Document19 pagesFunctional Descr AIC01Rodrigo SampaioNo ratings yet
- ExMotion1 3DFourbarLinkageDocument3 pagesExMotion1 3DFourbarLinkageMarc UrgellNo ratings yet
- AdvancedOperations E R11Document463 pagesAdvancedOperations E R11hoangducnam100% (1)
- Laboratory Manual Course Code:Ece 201Document41 pagesLaboratory Manual Course Code:Ece 201Atul SainiNo ratings yet
- Re - 5 - Synchro-Check/ Voltage-Check Function Stage 1 (Scvcst1) Stage 2 (Scvcst2)Document22 pagesRe - 5 - Synchro-Check/ Voltage-Check Function Stage 1 (Scvcst1) Stage 2 (Scvcst2)haichau199No ratings yet
- Imaje S8c2Document142 pagesImaje S8c2Kibryhun MitikuNo ratings yet
- SCA100T Inclinometer Datasheet 8261800ADocument18 pagesSCA100T Inclinometer Datasheet 8261800Aapi-26279731No ratings yet
- Rej 603 - B524 PDFDocument9 pagesRej 603 - B524 PDFkra_amNo ratings yet
- Multisim PART B PDFDocument39 pagesMultisim PART B PDFNabeela SayeedaNo ratings yet
- Roto DservmanDocument117 pagesRoto DservmansambadeeNo ratings yet
- CET - Monitoring - User Manual - T2S ETH - en - V2.3Document122 pagesCET - Monitoring - User Manual - T2S ETH - en - V2.3Fernando LeonNo ratings yet
- EN Whitepaper On Cloud Vs On-Premise LoResDocument23 pagesEN Whitepaper On Cloud Vs On-Premise LoResFernando LeonNo ratings yet
- A6V13790648 enDocument19 pagesA6V13790648 enFernando LeonNo ratings yet
- E3Point - Monitor de Gases Combustibles y Tóxicos PDFDocument4 pagesE3Point - Monitor de Gases Combustibles y Tóxicos PDFCesc MezaNo ratings yet
- CaseStudy EuropeanHeadOffice ENDocument5 pagesCaseStudy EuropeanHeadOffice ENFernando LeonNo ratings yet
- 2015 Commercial Product Guide PG11009 NCLDocument36 pages2015 Commercial Product Guide PG11009 NCLFernando LeonNo ratings yet
- Ingersoll Rand - Xe-145F Advanced System Control PDFDocument2 pagesIngersoll Rand - Xe-145F Advanced System Control PDFFernando LeonNo ratings yet
- 6-TIA MICRO1 06E ProgBlockEditorDocument35 pages6-TIA MICRO1 06E ProgBlockEditorFernando LeonNo ratings yet
- Product Overview For SIMATIC S7-1200Document11 pagesProduct Overview For SIMATIC S7-1200Giang TrườngNo ratings yet
- Compressed Air Source BookDocument128 pagesCompressed Air Source Bookgfollert100% (1)
- 5-Tia Micro1 05e PLC TagsDocument24 pages5-Tia Micro1 05e PLC TagsFernando LeonNo ratings yet
- I22E EN 02+varispeed L7+Datasheet PDFDocument20 pagesI22E EN 02+varispeed L7+Datasheet PDFjose parraNo ratings yet
- Jgekt 10.24.2018Document2 pagesJgekt 10.24.2018Fernando LeonNo ratings yet
- JGNQ - Compresor ArielDocument2 pagesJGNQ - Compresor ArielRogers Alberto Alvarez GuzmanNo ratings yet
- 81161i Piattaforme 04-2018 EngDocument20 pages81161i Piattaforme 04-2018 EngEvandro Amaral RodriguesNo ratings yet
- Group ASSIGNMENT 1 DSSDocument6 pagesGroup ASSIGNMENT 1 DSSh&h seriesNo ratings yet
- Sage X3 - How To Print A Customer Return Form in X3Document3 pagesSage X3 - How To Print A Customer Return Form in X3caplusincNo ratings yet
- Functions CheatsheetDocument4 pagesFunctions CheatsheetPranay BagdeNo ratings yet
- RSA Security Analytics ESA Configuration GuideDocument48 pagesRSA Security Analytics ESA Configuration GuideAbdourahmane thiaw100% (1)
- Kollmorgen AKM - ServomotorDocument44 pagesKollmorgen AKM - ServomotorMiguel GonzalezNo ratings yet
- KIEN7009: 9 Port Layer 2 Simple Managed DIN-Rail SwitchesDocument7 pagesKIEN7009: 9 Port Layer 2 Simple Managed DIN-Rail SwitchesHaider-e-KararNo ratings yet
- Service Manual Exiprep BioneerDocument110 pagesService Manual Exiprep BioneerdhcastanoNo ratings yet
- Telugu IME ReadmeDocument5 pagesTelugu IME Readmesravannkumar2626ramNo ratings yet
- QB Services Engagement LetterDocument2 pagesQB Services Engagement LetterJoshua UmaliNo ratings yet
- Modularity and Oop in PythonDocument22 pagesModularity and Oop in PythonShenbagavalli AnnamalaiNo ratings yet
- Prabh CV PDFDocument7 pagesPrabh CV PDFKeshav Kumar100% (1)
- m9 Sterilizer Autoclave User ManualDocument132 pagesm9 Sterilizer Autoclave User Manualfleetw00dNo ratings yet
- Alliance University Digital NotebookDocument12 pagesAlliance University Digital NotebookmadhavNo ratings yet
- AT-2plus 6-Channel ECG Unit: MemoryDocument98 pagesAT-2plus 6-Channel ECG Unit: MemoryOle CheNo ratings yet
- EN Specification Sheet VEGABAR 39 Two Wire 4 20 MaDocument2 pagesEN Specification Sheet VEGABAR 39 Two Wire 4 20 MaCarolina EnriquezNo ratings yet
- Ebook Xray Jira Start Guide Test Management PDFDocument36 pagesEbook Xray Jira Start Guide Test Management PDFSudipta DuttaNo ratings yet
- MCN Workshop - Unlink Seller Account 11 - 10Document27 pagesMCN Workshop - Unlink Seller Account 11 - 10mochammad nuqba haririNo ratings yet
- Warning: Asm170 Murphymatic Micro-Controller Installation and Operation InstructionsDocument4 pagesWarning: Asm170 Murphymatic Micro-Controller Installation and Operation InstructionsSuryadiNo ratings yet
- Kanakapura Road, Bengaluru, Karnataka 560062 To Calvary Chapel Church Road, Bengaluru, Karnataka 560082 - Google MapsDocument2 pagesKanakapura Road, Bengaluru, Karnataka 560062 To Calvary Chapel Church Road, Bengaluru, Karnataka 560082 - Google MapsPavan D NayakNo ratings yet
- Raciocínio Clínico Aplicado À Estética Corporal - Dr. João Tassinary PDFDocument231 pagesRaciocínio Clínico Aplicado À Estética Corporal - Dr. João Tassinary PDFLaura Tomazelli100% (1)
- The Contemporary World ResearchDocument30 pagesThe Contemporary World ResearchElpie Rose Urbina GadonNo ratings yet
- Number TheoryDocument5 pagesNumber TheoryLAKHAN KHANDELWALNo ratings yet
- RP58-Setting Integration Tool Manual (RT V1.0)Document22 pagesRP58-Setting Integration Tool Manual (RT V1.0)DP WijayaNo ratings yet
- File Do An ThuDocument11 pagesFile Do An Thusanbay phanthietNo ratings yet
- University of Mumbai Qution Bank: ECCDLO8044Document5 pagesUniversity of Mumbai Qution Bank: ECCDLO8044ROHIT MANENo ratings yet
- Model Question Paper Problem Solving Using Programming in CDocument2 pagesModel Question Paper Problem Solving Using Programming in C23suds29No ratings yet
- Frequently-Used Properties of The Floor Function: International Journal of Applied Physics and Mathematics October 2020Document9 pagesFrequently-Used Properties of The Floor Function: International Journal of Applied Physics and Mathematics October 2020adam smithNo ratings yet
- 943-Article Text-943-1-10-20160308Document8 pages943-Article Text-943-1-10-20160308sosoNo ratings yet
- CIT QuestionsDocument18 pagesCIT QuestionsChristopher NakpodiaNo ratings yet
- Genesys 20Document205 pagesGenesys 20Martin Fco EncinasNo ratings yet