You might also like
- Introduction To The Plumbing Profession: Annotated Instructor's GuideDocument32 pagesIntroduction To The Plumbing Profession: Annotated Instructor's GuideRiellaine Jan JabinesNo ratings yet
- Coon's PatchDocument4 pagesCoon's PatchKarthick DuraiNo ratings yet
- Computer: 9 OperationsDocument44 pagesComputer: 9 OperationsTki NeweNo ratings yet
- Geometric Modelling TechniquesDocument8 pagesGeometric Modelling TechniquesRaghuNo ratings yet
- Drawing Curves Onto A Cloud of Points For Point-Based ModellingDocument14 pagesDrawing Curves Onto A Cloud of Points For Point-Based ModellingNeelesh SrivastavaNo ratings yet
- Thompson 1999 FBR PDFDocument10 pagesThompson 1999 FBR PDFjilmar_1995No ratings yet
- Cad Cam Lab ManualDocument75 pagesCad Cam Lab ManualHariprasad100% (1)
- Unit 2Document34 pagesUnit 2sai venkatsharmaNo ratings yet
- Introduction of 3D Modelling SoftwareDocument6 pagesIntroduction of 3D Modelling SoftwarevijayakumarNo ratings yet
- Overview of CadDocument11 pagesOverview of CadIrish Camille BautistaNo ratings yet
- Cad Cam-6Document67 pagesCad Cam-6ShahmirBalochNo ratings yet
- 10.1016@s0010 44850100100 2Document13 pages10.1016@s0010 44850100100 2Tejas moteNo ratings yet
- Reverse EngineeringDocument3 pagesReverse Engineeringibrahim100% (1)
- (Review) - 1999-Computational Fluid Dynamics For Turbomachinery DesignDocument18 pages(Review) - 1999-Computational Fluid Dynamics For Turbomachinery DesignJianbo JiangNo ratings yet
- C Unit 3 MDocument25 pagesC Unit 3 MArul KarthikeyanNo ratings yet
- Helix ApproximationDocument32 pagesHelix ApproximationvishesharadaNo ratings yet
- 1 s2.0 S2090447922002635 MainDocument8 pages1 s2.0 S2090447922002635 MainBlack LynxNo ratings yet
- UNIT-I - GM PPT FinalDocument126 pagesUNIT-I - GM PPT Finalavishal ramNo ratings yet
- Introduction of 3D Modelling SoftwareDocument6 pagesIntroduction of 3D Modelling SoftwarevijayakumarNo ratings yet
- Lattice-XVL A Compact and Qualified 3D Representation With Lattice Mesh and Surface For The InternetDocument7 pagesLattice-XVL A Compact and Qualified 3D Representation With Lattice Mesh and Surface For The InternetkarthegreNo ratings yet
- Mesh Following TechniqueDocument11 pagesMesh Following TechniqueGeorge CretulNo ratings yet
- Technical Talk On CAD: Kurian Antony M.E Cad/CamDocument28 pagesTechnical Talk On CAD: Kurian Antony M.E Cad/Camjust4kurianNo ratings yet
- Interface Formats: Mathematical RepresentationDocument7 pagesInterface Formats: Mathematical RepresentationvinaysammNo ratings yet
- 3D Geometric Modelling Based On NURBSDocument11 pages3D Geometric Modelling Based On NURBSDodeptrai BkNo ratings yet
- PrefaceDocument3 pagesPrefaceswarn.mallNo ratings yet
- Application of NURBS For Obtaining Free Form Curves and Surfaces in Spur and Helical Gears by Using CMM (Coordinate Measurement Machine)Document9 pagesApplication of NURBS For Obtaining Free Form Curves and Surfaces in Spur and Helical Gears by Using CMM (Coordinate Measurement Machine)dpomahNo ratings yet
- Course 2 EngDocument12 pagesCourse 2 Engkrishnaram1233No ratings yet
- Geometric Modelling TechniqueDocument3 pagesGeometric Modelling Techniqueakshay_pundeNo ratings yet
- A Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormDocument5 pagesA Tool Path Generation Strategy For Three-Axis Ball-End Milling of Free-FormNipo Produção TextualNo ratings yet
- 3 6 1 P 60477bf33412e FileDocument10 pages3 6 1 P 60477bf33412e FileKunal AhiwaleNo ratings yet
- Geometric Modelin: Cad/Cam Iv B. Tech I Sem (R15)Document24 pagesGeometric Modelin: Cad/Cam Iv B. Tech I Sem (R15)Subbu SuniNo ratings yet
- Geometric Modeling, Its Need by Various Organization and Rrequirement To Complete A Geometric MoedlDocument5 pagesGeometric Modeling, Its Need by Various Organization and Rrequirement To Complete A Geometric Moedlqadir aliNo ratings yet
- Eastman Paper BIM AIA - 1975 - OCR - JDCDocument6 pagesEastman Paper BIM AIA - 1975 - OCR - JDCGloriaNo ratings yet
- Rapid Prototyping - WikipediaDocument15 pagesRapid Prototyping - WikipediaChalla varun KumarNo ratings yet
- McENG 6218 Ch2Document129 pagesMcENG 6218 Ch2yemane gebremichalNo ratings yet
- Module 1Document45 pagesModule 1SohanNo ratings yet
- Cad Exp 3Document5 pagesCad Exp 3VedprakashNo ratings yet
- Rendering Parametric Surfaces in Pen and Ink: Georges Winkenbach David H. SalesinDocument8 pagesRendering Parametric Surfaces in Pen and Ink: Georges Winkenbach David H. SalesinAnonymous GKqp4HnNo ratings yet
- Ie433 Cad/Cam Computer Aided Design and Computer Aided Manufacturing Part-4 Computer GraphicsDocument46 pagesIe433 Cad/Cam Computer Aided Design and Computer Aided Manufacturing Part-4 Computer GraphicsKo ThihaNo ratings yet
- CAD System AlgorithmDocument11 pagesCAD System Algorithmsachin bNo ratings yet
- From One-Month CFD To One-Day CFD - Efforts For Reducing Time and Cost of CFDDocument2 pagesFrom One-Month CFD To One-Day CFD - Efforts For Reducing Time and Cost of CFDMuhammad AbbasNo ratings yet
- 2012-Dense Reconstruction On The FlyDocument9 pages2012-Dense Reconstruction On The FlyMarcelo VieiraNo ratings yet
- Mesh Generation: Advances and Applications in Computer Vision Mesh GenerationFrom EverandMesh Generation: Advances and Applications in Computer Vision Mesh GenerationNo ratings yet
- CAD CAM (5TH Semester)Document23 pagesCAD CAM (5TH Semester)Foysal AhamedNo ratings yet
- Surface Reconstruction ThesisDocument33 pagesSurface Reconstruction ThesisalexNo ratings yet
- Dowell - Closed-Form Moment Solution For Continuous Beams and Bridge Structures, 2009Document8 pagesDowell - Closed-Form Moment Solution For Continuous Beams and Bridge Structures, 2009martrantNo ratings yet
- Drawing Subway Maps: A Survey: Alexander WolffDocument22 pagesDrawing Subway Maps: A Survey: Alexander WolffJosé Pablo CeballosNo ratings yet
- Three-Dimensional Object RepresentationsDocument7 pagesThree-Dimensional Object RepresentationsRishab Mehta83% (6)
- Hull Form FairingDocument12 pagesHull Form FairingKalNo ratings yet
- Automatic Reconstruction of 3D CAD Models From Digital ScansDocument35 pagesAutomatic Reconstruction of 3D CAD Models From Digital Scansirinuca12No ratings yet
- Introduction To Computer Aided Design and Computer Aided ManufacturingDocument43 pagesIntroduction To Computer Aided Design and Computer Aided ManufacturingMohammed Fakhruddin Hasan NizamiNo ratings yet
- Cadcam Assignments PartADocument4 pagesCadcam Assignments PartAmkumar_234155No ratings yet
- Design of Complicated Spline Trajectory With The Help of Matlab Program by The Extracted Data Through The Iges Reader For CNC Tool MotionDocument11 pagesDesign of Complicated Spline Trajectory With The Help of Matlab Program by The Extracted Data Through The Iges Reader For CNC Tool MotionESSID MOHAMEDNo ratings yet
- Geometric ModellingDocument138 pagesGeometric ModellingSandeela NaveedNo ratings yet
- Ijciet 09 09 070Document17 pagesIjciet 09 09 070alaawagdybv2No ratings yet
- Geometry Processing For Real-Time Pencil SketchingDocument8 pagesGeometry Processing For Real-Time Pencil SketchingHồ Văn ChươngNo ratings yet
- 3D Modelling: DR Rajesh Panda Sto - Cad/Cam - CipetDocument52 pages3D Modelling: DR Rajesh Panda Sto - Cad/Cam - CipetRajesh PandaNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- 2009 MeshlessDocument24 pages2009 MeshlessThutchai PhoNo ratings yet
- Application of Group Theory in The Field of Computer ScienceDocument1 pageApplication of Group Theory in The Field of Computer Scienceahmed19924No ratings yet
- Polygon Computer Graphics: Exploring the Intersection of Polygon Computer Graphics and Computer VisionFrom EverandPolygon Computer Graphics: Exploring the Intersection of Polygon Computer Graphics and Computer VisionNo ratings yet
- Icz FK 2 Kvra 240319062003Document1 pageIcz FK 2 Kvra 240319062003Prabin MahatoNo ratings yet
- All Chapter Question in 1Document40 pagesAll Chapter Question in 1Prabin MahatoNo ratings yet
- Ma8353 Tpde Improvement Test 02: Excel Engineering College (Autonomous)Document3 pagesMa8353 Tpde Improvement Test 02: Excel Engineering College (Autonomous)Prabin MahatoNo ratings yet
- Unit - 1: Partial Differential EquationsDocument49 pagesUnit - 1: Partial Differential EquationsPrabin MahatoNo ratings yet
- It 1Document5 pagesIt 1Prabin MahatoNo ratings yet
- M & M MCQ QPDocument12 pagesM & M MCQ QPPrabin MahatoNo ratings yet
- Ma 8353 Tpde Iae 3 MCQ Type: Excel Engineering CollegeDocument4 pagesMa 8353 Tpde Iae 3 MCQ Type: Excel Engineering CollegePrabin MahatoNo ratings yet
- ME8651-Design of Transmission SystemsDocument21 pagesME8651-Design of Transmission SystemsPrabin MahatoNo ratings yet
- MECH Nov Dec 20 Exam TimetableDocument2 pagesMECH Nov Dec 20 Exam TimetablePrabin MahatoNo ratings yet
- Unit Ii Spur Gear and Parallel Axis Helical GearsDocument4 pagesUnit Ii Spur Gear and Parallel Axis Helical GearsPrabin MahatoNo ratings yet
- Apr-May 2021 TimetableDocument19 pagesApr-May 2021 TimetablePrabin MahatoNo ratings yet
- Anna University Book Collection For 2017 Regulation (B.E.) : MR StudentDocument1 pageAnna University Book Collection For 2017 Regulation (B.E.) : MR StudentPrabin MahatoNo ratings yet
- Excel Engineering College: Roll NoDocument2 pagesExcel Engineering College: Roll NoPrabin MahatoNo ratings yet
- Iae 2QP CadmDocument1 pageIae 2QP CadmPrabin MahatoNo ratings yet
- Governor Regulates The Mean Speed of An Engine When There Are Variations in TheDocument28 pagesGovernor Regulates The Mean Speed of An Engine When There Are Variations in ThePrabin MahatoNo ratings yet
- Miniproject FormatDocument8 pagesMiniproject FormatPrabin MahatoNo ratings yet
- Computer Aided Engineering DrawingDocument2 pagesComputer Aided Engineering DrawingSuhasini PranayNo ratings yet
- CAEG PPT Updated 05.01.2022Document37 pagesCAEG PPT Updated 05.01.2022Bharatish ANo ratings yet
- BTech (Mechanical Engineering) Curriculum For 2012 - 2013Document103 pagesBTech (Mechanical Engineering) Curriculum For 2012 - 2013Allen ChandlerNo ratings yet
- Modul 2 Eng-Drawing - Projection SystemsDocument39 pagesModul 2 Eng-Drawing - Projection SystemsnanangasNo ratings yet
- Entering Survey Data Using AutoCADDocument36 pagesEntering Survey Data Using AutoCADuntoniNo ratings yet
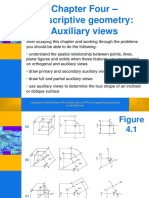
- Chapter Four - Descriptive Geometry: Auxiliary ViewsDocument25 pagesChapter Four - Descriptive Geometry: Auxiliary ViewsAnonymous ND7J0nIYNo ratings yet
- Engineering Drawings: The Blank Engineering Drawing FormDocument16 pagesEngineering Drawings: The Blank Engineering Drawing Formadnan100% (1)
- BOOK - Engineering Graphics & Design - 8 Sept Final 230 PMDocument236 pagesBOOK - Engineering Graphics & Design - 8 Sept Final 230 PMmadhukeshwaraNo ratings yet
- A New Approach For The Effectiveness of Coaxiality Tolerance VerificationDocument11 pagesA New Approach For The Effectiveness of Coaxiality Tolerance VerificationJuan Posada GNo ratings yet
- Aerospace Sample ResumeDocument2 pagesAerospace Sample ResumeSandeep BandyopadhyayNo ratings yet
- CUERDO, JAHARA N. - ES 111.1 - Engineering Drawings and Plans - SyllabusDocument9 pagesCUERDO, JAHARA N. - ES 111.1 - Engineering Drawings and Plans - SyllabusJahara N. Cuerdo100% (1)
- METC 107-S1C SyllabusDocument8 pagesMETC 107-S1C SyllabusAnonymous OPQOxbNo ratings yet
- Computer-Aided Quantity Survey Software Vhstation: AbstractDocument9 pagesComputer-Aided Quantity Survey Software Vhstation: AbstractRonaldo B VillaromanNo ratings yet
- Caed 14Document5 pagesCaed 14SameerAhsanNo ratings yet
- Engineering Drawing: (NSQF) 1 YearDocument80 pagesEngineering Drawing: (NSQF) 1 YearAkshay Kumar KNo ratings yet
- CGSC Draughtsman MechanicalDocument33 pagesCGSC Draughtsman MechanicalJaiNo ratings yet
- CBSE Class 12 Engineering Drawing Solved Sample Paper-02 (For 2011)Document9 pagesCBSE Class 12 Engineering Drawing Solved Sample Paper-02 (For 2011)cbsesamplepaperNo ratings yet
- F13 Lab 3 Engineering DrawingDocument5 pagesF13 Lab 3 Engineering DrawingvillasharinganNo ratings yet
- Course Outcomes by Cad CamDocument2 pagesCourse Outcomes by Cad CamSubhash K0% (1)
- Dimensioning Objectives: A. Technique of DimensioningDocument22 pagesDimensioning Objectives: A. Technique of DimensioningAldrin VillanuevaNo ratings yet
- 1st Sem 2Document19 pages1st Sem 2Sunil GuptaNo ratings yet
- CNH Spec DWGA155 - Casting ID MarkingDocument6 pagesCNH Spec DWGA155 - Casting ID MarkingJoe ScopeliteNo ratings yet
- Laws, EtcDocument40 pagesLaws, EtcSambaikong D DaglokNo ratings yet
- Drawing Standard: Drawing Sheet Sizes and FormatsDocument29 pagesDrawing Standard: Drawing Sheet Sizes and Formatssumit_saraf_5No ratings yet
- 53 DRG Basics Quiz With AnswersDocument2 pages53 DRG Basics Quiz With Answersalankar2050No ratings yet
- The Importance of Engineering DrawingDocument4 pagesThe Importance of Engineering DrawingAlly DeanNo ratings yet
- Gujarat Technological University Engineering Graphics & Design 1 Year Subject Code: 3110013Document2 pagesGujarat Technological University Engineering Graphics & Design 1 Year Subject Code: 3110013Aishwary GohilNo ratings yet
- Upang Cea 2bsme Mae109 P1Document32 pagesUpang Cea 2bsme Mae109 P1Althea ManlaNo ratings yet
- HandoutDocument2 pagesHandoutMadhvansh ChoksiNo ratings yet