You might also like
- Bolomoters Running Backward 2006Document12 pagesBolomoters Running Backward 2006sapa3No ratings yet
- Diagrama Electrico 533DDocument2 pagesDiagrama Electrico 533DJordan RaveloNo ratings yet
- Thin FilmsDocument9 pagesThin Filmshareesh13hNo ratings yet
- Arduino Measurements in Science: Advanced Techniques and Data ProjectsFrom EverandArduino Measurements in Science: Advanced Techniques and Data ProjectsNo ratings yet
- Principles of Ship HandlingDocument10 pagesPrinciples of Ship HandlingFrednixen GapoyNo ratings yet
- Making the Right Choice: Metal Detection vs. X-RayDocument27 pagesMaking the Right Choice: Metal Detection vs. X-RayCindy ChandraNo ratings yet
- Delta Power Meter DPM Series: Automation For A Changing WorldDocument16 pagesDelta Power Meter DPM Series: Automation For A Changing WorldCarlos Alirio Vera ANo ratings yet
- Physics Laboratory Report On Simple PendulumDocument9 pagesPhysics Laboratory Report On Simple PendulumTesfamichael AbathunNo ratings yet
- Imaging Infrared Seeker or Antitank MissileDocument4 pagesImaging Infrared Seeker or Antitank MissileRamesh Sanil100% (2)
- Calibration of Uncooled Thermal Infrared CamerasDocument11 pagesCalibration of Uncooled Thermal Infrared Camerasing jyaNo ratings yet
- Ciarp2011 Submission 85Document8 pagesCiarp2011 Submission 85Daniela BonillaNo ratings yet
- Numerical Methods in Termal Zvonko Radmi 2011Document7 pagesNumerical Methods in Termal Zvonko Radmi 2011Zvonko DamnjanovicNo ratings yet
- A (10°C ; 70°C) 640×480 17μm Pixel Pitch TEC-Less IR Bolometer Imager with Below 50mK and Below 4V Power SupplyDocument3 pagesA (10°C ; 70°C) 640×480 17μm Pixel Pitch TEC-Less IR Bolometer Imager with Below 50mK and Below 4V Power Supply박승현No ratings yet
- Micro Devices For Temperature Sensing: A Report by R. Krishna Chaithanya ID NO: 2009B5A8546GDocument5 pagesMicro Devices For Temperature Sensing: A Report by R. Krishna Chaithanya ID NO: 2009B5A8546GshivanshtripathiNo ratings yet
- MetrologyDocument10 pagesMetrologyFahmy Munawar CholilNo ratings yet
- Infrared System Specifications - What Does It All Mean?: AbstractDocument8 pagesInfrared System Specifications - What Does It All Mean?: Abstractkov709324No ratings yet
- Electrical System Inspection Theory and Thermal Signatures of ProblemsDocument12 pagesElectrical System Inspection Theory and Thermal Signatures of Problemsjide.atolagbe3737No ratings yet
- (Proc - Eurosensors XXIV 2010) Smart Temperature Sensors in Standard CMOSDocument10 pages(Proc - Eurosensors XXIV 2010) Smart Temperature Sensors in Standard CMOSwleaderheeNo ratings yet
- Design of MEMS Temperature Sensor For High Voltage SwitchgearDocument6 pagesDesign of MEMS Temperature Sensor For High Voltage SwitchgearNguyen ngoc thongNo ratings yet
- Basic IR KnowledgeDocument5 pagesBasic IR KnowledgeWilliam Orozco LópezNo ratings yet
- IR Sensor Calibration - Extreme Uniformity Is Not BoringDocument8 pagesIR Sensor Calibration - Extreme Uniformity Is Not BoringrajannplNo ratings yet
- Horizon Detection Using ThermopilesDocument11 pagesHorizon Detection Using ThermopilesRobin LiljaNo ratings yet
- Weld TestDocument5 pagesWeld Testkoib789No ratings yet
- Optical Characterisation of La0 7Sr0 3MnDocument5 pagesOptical Characterisation of La0 7Sr0 3MnbjsimardNo ratings yet
- Pyranometer, DATA LOGGER, SensorsDocument31 pagesPyranometer, DATA LOGGER, SensorsSahil AroraNo ratings yet
- Schinke 2020 Metrologia 57 065027Document28 pagesSchinke 2020 Metrologia 57 065027diego.pavanello7081No ratings yet
- Solar Radiation Resource Assessment by Means of Silicon CellsDocument9 pagesSolar Radiation Resource Assessment by Means of Silicon CellsalexanderritschelNo ratings yet
- Chapter-3 InstrumentationDocument25 pagesChapter-3 InstrumentationalinoriNo ratings yet
- Explanation: ῦ (pyr), meaning "fire", and νω ἄDocument6 pagesExplanation: ῦ (pyr), meaning "fire", and νω ἄMonika KshetriNo ratings yet
- Sensor Posicion Luz Art - DesbloqueadoDocument6 pagesSensor Posicion Luz Art - DesbloqueadoAngel SanchezNo ratings yet
- Low-Cost Solar Irradiance Meter Using LDR SensorsDocument9 pagesLow-Cost Solar Irradiance Meter Using LDR Sensorsnofal AdreesNo ratings yet
- Pages From CH 3Document6 pagesPages From CH 3upenderNo ratings yet
- Classification of Pyranometers: PyranometerDocument3 pagesClassification of Pyranometers: PyranometerRiazul IslamNo ratings yet
- Sensors: High Sensitivity MEMS Strain Sensor: Design and SimulationDocument20 pagesSensors: High Sensitivity MEMS Strain Sensor: Design and Simulationvijayasarathy2013No ratings yet
- Machine Learning Based Automatic Defect Detection in Non Stationary Thermal Wave ImagingDocument7 pagesMachine Learning Based Automatic Defect Detection in Non Stationary Thermal Wave ImagingENG AIK LIMNo ratings yet
- Use of Infra-Red Thermography For Automotive Climate Control AnalysisDocument5 pagesUse of Infra-Red Thermography For Automotive Climate Control AnalysissinasayedanaNo ratings yet
- For Data Compression and Prediction: Learning in Wireless Sensor NetworksDocument60 pagesFor Data Compression and Prediction: Learning in Wireless Sensor NetworksAugusto BaffaNo ratings yet
- Temperature Compensation of Total Power RadiometersDocument6 pagesTemperature Compensation of Total Power RadiometersJoh IgnacioNo ratings yet
- Development of Low-Cost Thermal Camera For Examine Human Body TemperatureDocument7 pagesDevelopment of Low-Cost Thermal Camera For Examine Human Body TemperatureJoko NugrohoNo ratings yet
- Modeling of Vibration Sensing With Variable Fabry-Perot SystemDocument6 pagesModeling of Vibration Sensing With Variable Fabry-Perot SystemfadhaliNo ratings yet
- Low-Cost Solar Irradiance Meter Using LDR SensorsDocument8 pagesLow-Cost Solar Irradiance Meter Using LDR SensorsMichelle LlamatumbiNo ratings yet
- 2016-An Analog Front-End For A Multifunction Sensor Employing A Weak-Inversion Biasing Technique With 26 Nvrms 25 Acrms and 19 Farms Input-Referred NoiseDocument10 pages2016-An Analog Front-End For A Multifunction Sensor Employing A Weak-Inversion Biasing Technique With 26 Nvrms 25 Acrms and 19 Farms Input-Referred Noisesiraporn sakphromNo ratings yet
- Astm E2758 22Document11 pagesAstm E2758 22Can EkiciNo ratings yet
- Automatic Diagnosis System of Electrical Equipment Using Infrared ThermographyDocument6 pagesAutomatic Diagnosis System of Electrical Equipment Using Infrared Thermographysurbhi pareekNo ratings yet
- Akin c20 Mems2001Document4 pagesAkin c20 Mems2001bl19cm7No ratings yet
- Design AND Implementation OF A Digital Thermometer With ClockDocument10 pagesDesign AND Implementation OF A Digital Thermometer With ClockMuhammad Raza RafiqNo ratings yet
- Implementation of Infrared Thermography in Power UtilitiesDocument9 pagesImplementation of Infrared Thermography in Power UtilitiesMohamed HamedNo ratings yet
- Guoyin Shen, M. L. Rivers, Yanbin Wang, and S. R. Sutton - New Developments On Laser Heated Diamond Anvil CellDocument4 pagesGuoyin Shen, M. L. Rivers, Yanbin Wang, and S. R. Sutton - New Developments On Laser Heated Diamond Anvil CellDrebuioNo ratings yet
- Infrared Thermography Basics ExplainedDocument6 pagesInfrared Thermography Basics ExplainedupenderNo ratings yet
- Infrared Thermography Princeton University Gas DynamicsDocument20 pagesInfrared Thermography Princeton University Gas DynamicsDs HarrisNo ratings yet
- Emissivity Measurement and Temperature Correction Accuracy ConsiderationsDocument9 pagesEmissivity Measurement and Temperature Correction Accuracy ConsiderationsGiustNo ratings yet
- Noncontacting strain measurements at high temperatures by the digital laser speckle correlationDocument8 pagesNoncontacting strain measurements at high temperatures by the digital laser speckle correlationXiongJie CheNo ratings yet
- Wideband Transimpedance Amplifiers For Optoelectronics: Applications To Dynamic InterferometryDocument8 pagesWideband Transimpedance Amplifiers For Optoelectronics: Applications To Dynamic Interferometrymod-ingNo ratings yet
- Astm For NetdDocument4 pagesAstm For NetdamtcorporationNo ratings yet
- Thermal Compensation of Low-Cost MEMS Accelerometers For Tilt MeasurementsDocument18 pagesThermal Compensation of Low-Cost MEMS Accelerometers For Tilt Measurementscacalot93No ratings yet
- Sensitivity Analysis With Artificial Neutal Networks For Operation of Photovoltaic SystemsDocument12 pagesSensitivity Analysis With Artificial Neutal Networks For Operation of Photovoltaic SystemsPaulette FernandaNo ratings yet
- Human Detection Using ThermopilesDocument7 pagesHuman Detection Using ThermopilesammukartiNo ratings yet
- Ultra Low Power Wireless Weather StationDocument6 pagesUltra Low Power Wireless Weather Stationwahyuthp43No ratings yet
- Comparisson of Different Methods Measure PDFDocument9 pagesComparisson of Different Methods Measure PDFCristian Javier Ruiz AlvarezNo ratings yet
- Measuring Secondary Flow in a Two-Stage Turbine Rig Using Tunnelling VelocimetryDocument8 pagesMeasuring Secondary Flow in a Two-Stage Turbine Rig Using Tunnelling VelocimetryMarcelo Funes-GallanziNo ratings yet
- Upload Mach Zehnder Interferometer and Its Temperature Based ApplicationsDocument31 pagesUpload Mach Zehnder Interferometer and Its Temperature Based ApplicationsMridul ChakrabortyNo ratings yet
- SRF HRF SSR DanjouxDocument12 pagesSRF HRF SSR Danjouxalexander100% (1)
- Interferometric measurements of high temperature objects by electronic speckle pattern interferometryDocument6 pagesInterferometric measurements of high temperature objects by electronic speckle pattern interferometryXiongJie CheNo ratings yet
- Explosive SC Penetration Into Tuff RockDocument69 pagesExplosive SC Penetration Into Tuff RockBAYE JBPNo ratings yet
- PDF Arl 300 User Manual v19 - CompressDocument16 pagesPDF Arl 300 User Manual v19 - CompressSalah SalahNo ratings yet
- Tarea 3 TermodinamicaDocument3 pagesTarea 3 TermodinamicaMario GonzalezNo ratings yet
- Wrought Iron: Prepared & Submitted byDocument14 pagesWrought Iron: Prepared & Submitted bysujan shresthaNo ratings yet
- Item Codes & Specification For Instrumentation CableDocument16 pagesItem Codes & Specification For Instrumentation CableZulfequar R. Ali KhanNo ratings yet
- Annex-04 Turbosan NORM End Suction Erection ProcedureDocument31 pagesAnnex-04 Turbosan NORM End Suction Erection ProcedureEngr.Muhammad ObaidullahNo ratings yet
- 3 Wave Transformation 3ppDocument19 pages3 Wave Transformation 3ppEdgar Eduardo Cervantes BernabeNo ratings yet
- CPP-Solution of Triangle SMC NEWDocument2 pagesCPP-Solution of Triangle SMC NEWtechnical yogeshNo ratings yet
- How Trust Impacts Organizational Learning and InnovationDocument14 pagesHow Trust Impacts Organizational Learning and Innovationerika31123100% (1)
- MCQ in Differential Calculus (Limits and Derivatives) Part 1 - Math Board ExamDocument13 pagesMCQ in Differential Calculus (Limits and Derivatives) Part 1 - Math Board ExamAF Xal RoyNo ratings yet
- Catalogue: Facing BricksDocument82 pagesCatalogue: Facing BricksBipu1978No ratings yet
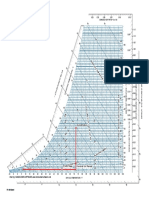
- State Point & Process Report: Psychrometric Chart Psychrometric ChartDocument1 pageState Point & Process Report: Psychrometric Chart Psychrometric ChartLee ChorneyNo ratings yet
- New empirical expression for breakdown voltage under temperature and pressure variationsDocument6 pagesNew empirical expression for breakdown voltage under temperature and pressure variationsasNo ratings yet
- Ac Generator TheoryDocument3 pagesAc Generator TheoryKrizelle ManaloNo ratings yet
- Artists' Pastels: Standard Specification ForDocument5 pagesArtists' Pastels: Standard Specification ForPyone Ei ZinNo ratings yet
- Journal of Building Engineering: SciencedirectDocument11 pagesJournal of Building Engineering: Sciencedirectr3dh34rtNo ratings yet
- Experiment: Woxalic AcidDocument3 pagesExperiment: Woxalic AcidShalini sahuNo ratings yet
- Combined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsDocument8 pagesCombined Effect of Damage and Plastic Anisotropy On The Ductility Limit of Thin Metal SheetsKrunal MoreyNo ratings yet
- A World Without Cause and Effect: Logic-Defying Experiments Into Quantum Causality Scramble The Notion of Time ItselfDocument3 pagesA World Without Cause and Effect: Logic-Defying Experiments Into Quantum Causality Scramble The Notion of Time ItselfWalterHuNo ratings yet
- 11-7077 Webinar QA - Upgrading To Aspen Plus or HYSYS V8 - FINALDocument3 pages11-7077 Webinar QA - Upgrading To Aspen Plus or HYSYS V8 - FINALAlmir SedićNo ratings yet
- Prepp - In-Preparation Strategy For IAS UPSC CSE Electrical Engineering OptionalDocument6 pagesPrepp - In-Preparation Strategy For IAS UPSC CSE Electrical Engineering Optionalmojo xoxoNo ratings yet
- 03 Transforms 3 DDocument5 pages03 Transforms 3 DWafa ElgalhoudNo ratings yet
- Section 7 - Separation EquipmentDocument9 pagesSection 7 - Separation Equipmentlulis171No ratings yet
- ESOPT Vol 2.2Document407 pagesESOPT Vol 2.2Alejandro Vázquez RamírezNo ratings yet
- Laprak Fixed and Fluidized BedDocument12 pagesLaprak Fixed and Fluidized BedIchsan ArdiansyahNo ratings yet