You might also like
- Yr10 Higher Term 2 Assessment Paper 2 2020-21Document23 pagesYr10 Higher Term 2 Assessment Paper 2 2020-21Archit GuptaNo ratings yet
- Transmission Line FoundationsDocument23 pagesTransmission Line FoundationsSaurav Kafle100% (1)
- Ashby Deformation Mechanism MapsDocument232 pagesAshby Deformation Mechanism MapsDaniel Eduardo Lescano100% (1)
- Environmental Isotopes in The Hydrological Cycle Vol 1 PDFDocument185 pagesEnvironmental Isotopes in The Hydrological Cycle Vol 1 PDFNoreida PRIETO MILLAN100% (1)
- Rock Dust - ParamagnetismDocument4 pagesRock Dust - ParamagnetismCiro GiordanoNo ratings yet
- Ir Music Transmitter and Reciever Project ReportDocument40 pagesIr Music Transmitter and Reciever Project ReportVaddi Vishwanath Kaushik100% (1)
- Two Peg Test 1.1Document7 pagesTwo Peg Test 1.1Eiyra Nadia50% (2)
- Control PDFDocument26 pagesControl PDFFlat MateNo ratings yet
- Compressed Air System in Thermal Power PlantDocument12 pagesCompressed Air System in Thermal Power PlantAshwani Dogra100% (4)
- Chem 31 AtqE1Document3 pagesChem 31 AtqE1Anonymous GO6JVW9WudNo ratings yet
- StimPRO CursoDocument65 pagesStimPRO CursoMiguelNo ratings yet
- Istruzioni Pv22p EnglishDocument169 pagesIstruzioni Pv22p Englishtex ilrom100% (3)
- Dr. Engy Aly Maher: Winter 2021Document66 pagesDr. Engy Aly Maher: Winter 2021ngmaherNo ratings yet
- Chapter 6 - Steady-State AnalysisDocument32 pagesChapter 6 - Steady-State AnalysisANDREW LEONG CHUN TATT STUDENTNo ratings yet
- Zero Order HoldDocument19 pagesZero Order HoldSn ProfNo ratings yet
- Control Strategy: Single Input and Single Output With Unit FeedbackDocument4 pagesControl Strategy: Single Input and Single Output With Unit FeedbackmulyanaNo ratings yet
- Steady State AnalysisDocument23 pagesSteady State AnalysisCharan ReddyNo ratings yet
- DNT 354 - Control Principle: Steady-State AnalysisDocument25 pagesDNT 354 - Control Principle: Steady-State AnalysisNiranjan BeheraNo ratings yet
- 4 Steady-State AnalysisDocument25 pages4 Steady-State AnalysisWisnu FerdinanNo ratings yet
- Chapter 5 Transient and Steady State ResponseDocument33 pagesChapter 5 Transient and Steady State ResponseSounak ChoudhuryNo ratings yet
- Lesson 9Document20 pagesLesson 9Dereje DeribNo ratings yet
- State-Steady ErrorDocument6 pagesState-Steady ErrorHarrysNo ratings yet
- WINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-02 Reference-Material-IDocument93 pagesWINSEM2020-21 EEE3001 ETH VL2020210500342 2021-03-02 Reference-Material-ISAIKAT MUKHERJEE 19BEE0132No ratings yet
- Formula Sheet Draft V2Document2 pagesFormula Sheet Draft V2Ryan HiraniNo ratings yet
- Chapter 6 SRDocument137 pagesChapter 6 SRMadhusmita BarikNo ratings yet
- Control & Instrumentation Overview PDFDocument56 pagesControl & Instrumentation Overview PDFTanaka dzapasiNo ratings yet
- Prof. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseDocument17 pagesProf. Eisa Bashier M.Tayeb 2021: Basic Test Signals and Control System Time ResponseOsama AlzakyNo ratings yet
- 4 - System Time ResponseDocument16 pages4 - System Time ResponseAndrewAbdelmassiehNo ratings yet
- Lesson 9Document20 pagesLesson 9kavya100% (1)
- Wise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Document19 pagesWise Reason Stupid Necessity: "The Are Instructed by by The, by And, by ." - Cicero (Pahala SamosirNo ratings yet
- Unit 5 Time-Domain Design of Control SystemDocument10 pagesUnit 5 Time-Domain Design of Control SystemNasrullah YusupNo ratings yet
- StabilityDocument6 pagesStabilitysekinNo ratings yet
- Lecture 7 - Steady State ErrorDocument15 pagesLecture 7 - Steady State ErrorAfiq AzharNo ratings yet
- EE311 Lecture TheeDocument18 pagesEE311 Lecture TheeĤmăđę HmNo ratings yet
- EMS507 Lecture 3 - System StabilityDocument21 pagesEMS507 Lecture 3 - System Stability124ll124No ratings yet
- L12 SystemType, DC Gain and Its Effect On The SystemDocument8 pagesL12 SystemType, DC Gain and Its Effect On The Systemalex carterNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument26 pagesControl Systems: GATE Objective & Numerical Type SolutionsFlat Mate67% (3)
- 5 - Closed Loop SystemsDocument22 pages5 - Closed Loop SystemsAndrewAbdelmassiehNo ratings yet
- Chap 6 Control System I - Web 1Document24 pagesChap 6 Control System I - Web 1吳晨瑋No ratings yet
- Aplicatii Stoltz-CesaroDocument2 pagesAplicatii Stoltz-CesaroPavelNo ratings yet
- Control Sol GA PDFDocument342 pagesControl Sol GA PDFRishabh ShuklaNo ratings yet
- EE 401 Control Systems Analysis and Design: A Review of The Laplace TransformDocument18 pagesEE 401 Control Systems Analysis and Design: A Review of The Laplace TransformJoshua HernandezNo ratings yet
- Lecture 3Document22 pagesLecture 3Houssam moussaNo ratings yet
- Transient Response and Steady-State Response: Week 5 Session 2Document23 pagesTransient Response and Steady-State Response: Week 5 Session 2Junaidy VandeanganNo ratings yet
- Transient and Steady State ResponseDocument24 pagesTransient and Steady State ResponseYasir DawoodNo ratings yet
- Lecture 1 IIR Digital Filter Design DGDocument16 pagesLecture 1 IIR Digital Filter Design DGAlina RazaNo ratings yet
- LEC4 04 خوارزميات أ زاهر مترجمة للطبعDocument30 pagesLEC4 04 خوارزميات أ زاهر مترجمة للطبعhashim alshrfiNo ratings yet
- Steady-State Errors in Unity-Feedback Control Systems - 0Document27 pagesSteady-State Errors in Unity-Feedback Control Systems - 0Hassan allaNo ratings yet
- Chapter2 Part C ModifiedDocument36 pagesChapter2 Part C Modifiedabed salemNo ratings yet
- Seminar 9 Sol PDFDocument2 pagesSeminar 9 Sol PDFRaya Najiba TroyeeNo ratings yet
- XT e E: 1. (A) and (B)Document19 pagesXT e E: 1. (A) and (B)Anonymous 0MQ3zRNo ratings yet
- MOOC Assignment-3 Answers PDFDocument15 pagesMOOC Assignment-3 Answers PDFvamshiNo ratings yet
- 3.1 Time-Domain Analysis of Control Systems: Unit-IiiDocument23 pages3.1 Time-Domain Analysis of Control Systems: Unit-IiiRajasekhar AtlaNo ratings yet
- SortingDocument62 pagesSortingcs.ramgopal7036No ratings yet
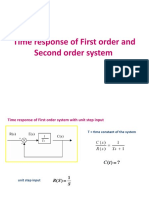
- 12-System Time response-2-14-Aug-2019Material - I - 14-Aug-2019 - Time - Response - of - First - Order - and - Second - OrderDocument22 pages12-System Time response-2-14-Aug-2019Material - I - 14-Aug-2019 - Time - Response - of - First - Order - and - Second - OrderSubhadeep JanaNo ratings yet
- Time Domain Analysis and Controllers Synthesis of Closed Loop SystemsDocument50 pagesTime Domain Analysis and Controllers Synthesis of Closed Loop SystemsMesut OzilNo ratings yet
- Control Systems: First-Order Systems: y y KxutDocument59 pagesControl Systems: First-Order Systems: y y KxutsatyamNo ratings yet
- EE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-StateDocument30 pagesEE3331C Feedback Control Systems L7: Control System Performance: Transient & Steady-Statepremsanjith subramaniNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100272 2023-05-18 Reference-Material-IIDocument30 pagesFALLSEM2023-24 BECE302L TH VL2023240100272 2023-05-18 Reference-Material-IIkrishna sanapala2003No ratings yet
- Pole-Placement by State-Space MethodsDocument36 pagesPole-Placement by State-Space MethodsbalkyderNo ratings yet
- ME 475 Mechatronics: Semester: February 2015Document15 pagesME 475 Mechatronics: Semester: February 2015ফারহান আহমেদ আবীরNo ratings yet
- ميحرلا نمحرلا الله مسب Advanced Control: Lecture threeDocument13 pagesميحرلا نمحرلا الله مسب Advanced Control: Lecture threealaNo ratings yet
- EET302 M2-Ktunotes - inDocument33 pagesEET302 M2-Ktunotes - inAkhilaNo ratings yet
- Tema - 8 - Sistemas - Primer y Segundo Orden (English)Document42 pagesTema - 8 - Sistemas - Primer y Segundo Orden (English)Kevin Eduardo MartinezNo ratings yet
- CSE - 610 Lecture # 5Document38 pagesCSE - 610 Lecture # 5zaidNo ratings yet
- L09 - Mode AnalysisDocument15 pagesL09 - Mode AnalysisAndrea RiccobeneNo ratings yet
- Ece 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XDocument4 pagesEce 232 Discrete-Time Signals and Systems Solved Problems I: DT e T X T C and e C T XistegNo ratings yet
- Lecture 3 ModelingDocument28 pagesLecture 3 ModelingSai AnoopNo ratings yet
- Step and Impulse ResponceDocument5 pagesStep and Impulse ResponceSumanta DeyNo ratings yet
- Steady State ErrorDocument42 pagesSteady State ErrorEng AbdiRahim Khalif AliNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Home Assignment #6Document5 pagesHome Assignment #6Phạm Bùi Đình LộcNo ratings yet
- Mathematical Review - SolDocument3 pagesMathematical Review - SolPhạm Bùi Đình LộcNo ratings yet
- IVC Series Small PLC Programming ManualDocument306 pagesIVC Series Small PLC Programming ManualPhạm Bùi Đình LộcNo ratings yet
- GD350A Series VFD ManualDocument378 pagesGD350A Series VFD ManualPhạm Bùi Đình LộcNo ratings yet
- Practice 2Document27 pagesPractice 2Erwin CabangalNo ratings yet
- Normas DINDocument2 pagesNormas DINMateo BanzanNo ratings yet
- MSDS Bio ChemicalsDocument8 pagesMSDS Bio ChemicalsfauziahNo ratings yet
- Physicochemical ProblemsDocument309 pagesPhysicochemical ProblemsNataniel LinaresNo ratings yet
- Operational Modal Analysis Case StudiesDocument46 pagesOperational Modal Analysis Case StudiesGabriele FicheraNo ratings yet
- Shree Shankara Sr. Sec. School Subject Enrichment Class-10Document4 pagesShree Shankara Sr. Sec. School Subject Enrichment Class-10Govind kumar SinghNo ratings yet
- 6th Grade Math - Covering and Surrounding Unit PlanDocument7 pages6th Grade Math - Covering and Surrounding Unit PlanBecky JohnsonNo ratings yet
- Charged (Pitch) PolishingDocument8 pagesCharged (Pitch) PolishingWNo ratings yet
- Steel Bar Product BroucherDocument16 pagesSteel Bar Product BroucherCREATIVE PIPING SOLUTIONS PVT. LTD.No ratings yet
- Cse N14 June2019 PDFDocument131 pagesCse N14 June2019 PDFeeng8124No ratings yet
- Textbook Answers EvenDocument43 pagesTextbook Answers EvenOylaNo ratings yet
- Stadium CVDocument12 pagesStadium CVCarezza Marie Aseniero100% (1)
- Slump of Hydraulic-Cement Concrete: Standard Test Method ForDocument4 pagesSlump of Hydraulic-Cement Concrete: Standard Test Method FormickyfelixNo ratings yet
- NSTC Sample Paper 2006Document24 pagesNSTC Sample Paper 2006Irfan Ali0% (2)
- Divya K Quantum ComputersDocument34 pagesDivya K Quantum Computersapi-3827000100% (1)
- The Graph Below Shows The Number of Enquiries Received by The Tourist Information Office in One City Over A Six Month Period in 2011Document13 pagesThe Graph Below Shows The Number of Enquiries Received by The Tourist Information Office in One City Over A Six Month Period in 2011Hiền VyNo ratings yet
- Kappa Dda Book, Feb 2011Document505 pagesKappa Dda Book, Feb 2011Gabriel ColmontNo ratings yet
- A Note On Water Clocks and On The AuthorDocument4 pagesA Note On Water Clocks and On The AuthorSelva KumarNo ratings yet