You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Sega Master System Service Manual PDFDocument33 pagesSega Master System Service Manual PDFdaviNo ratings yet
- PM NotesDocument128 pagesPM NotesluongktdtNo ratings yet
- Design of UpsamplerDocument7 pagesDesign of Upsamplerprasu440No ratings yet
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- TI VSD - ABB ACS800 Trouble Shooting 2946 0703 01Document17 pagesTI VSD - ABB ACS800 Trouble Shooting 2946 0703 01Natan Hernandez100% (3)
- ML4824 Power Factor Correction and PWM Controller Combo: General Description FeaturesDocument16 pagesML4824 Power Factor Correction and PWM Controller Combo: General Description FeaturesTaras100% (1)
- Memory Built in Self TestingDocument30 pagesMemory Built in Self TestingShereenHusseinNo ratings yet
- Project Management Plan and Project Documents Page 64-128Document2 pagesProject Management Plan and Project Documents Page 64-128luongktdtNo ratings yet
- Captain's Maintenance PanelDocument20 pagesCaptain's Maintenance PanelAlem Martin100% (1)
- An5789 Considerations On Bootstrap Circuitry For Gate Drivers StmicroelectronicsDocument14 pagesAn5789 Considerations On Bootstrap Circuitry For Gate Drivers StmicroelectronicsfireworkNo ratings yet
- Binder Wiring Escalator Modification Atrium Senen Food MartDocument13 pagesBinder Wiring Escalator Modification Atrium Senen Food MartWiratama MudaNo ratings yet
- CME Series: FeaturesDocument11 pagesCME Series: FeaturesindyanexpressNo ratings yet
- Ka 3511Document28 pagesKa 3511analias100% (1)
- Data SheetDocument30 pagesData SheetSubhash.2084 SNo ratings yet
- EM8635 ExcellianceMOSDocument13 pagesEM8635 ExcellianceMOSBruno MartinsNo ratings yet
- SD6835 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetDocument9 pagesSD6835 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetАлександр КачеишвилиNo ratings yet
- Viper 22aDocument8 pagesViper 22aLuis Carlos Bonilla AldanaNo ratings yet
- Design Consideration With AP3041: Application Note 1059Document6 pagesDesign Consideration With AP3041: Application Note 1059subisanNo ratings yet
- ATX Power Supply Schematic1Document1 pageATX Power Supply Schematic1Widiyatmono StNo ratings yet
- ML4425 Sensor Less BLDC Motor ControllerDocument17 pagesML4425 Sensor Less BLDC Motor Controllerfrazier8553No ratings yet
- NCP12400 Eval BoardDocument11 pagesNCP12400 Eval Board3degreesNo ratings yet
- Datasheet PDFDocument18 pagesDatasheet PDFSửa Tivi Tại NhàNo ratings yet
- TSUMV59MS-T9C Schematic Diagram - 2Document5 pagesTSUMV59MS-T9C Schematic Diagram - 2Maikol DominguezNo ratings yet
- SD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage MosfetDocument10 pagesSD6834 - Datasheet: Current Mode PWM+PFM Controller With Built-In High Voltage Mosfetحسین مشعلNo ratings yet
- Multi-Mode Controller For SMPS: FeaturesDocument51 pagesMulti-Mode Controller For SMPS: FeaturesMárcio FerreiraNo ratings yet
- Ci CS2841B PDFDocument6 pagesCi CS2841B PDFEdson CostaNo ratings yet
- 2-Channel Secondary Monitoring IC: Issue Date: File Name: Total PagesDocument10 pages2-Channel Secondary Monitoring IC: Issue Date: File Name: Total PagesParedão FrankensteinNo ratings yet
- TEA2260 TEA2261: Switch Mode Power Supply ControllerDocument9 pagesTEA2260 TEA2261: Switch Mode Power Supply ControllerKikyNo ratings yet
- DM311Document16 pagesDM311Hernan Ortiz EnamoradoNo ratings yet
- XC6201 Series: Positive Voltage RegulatorsDocument13 pagesXC6201 Series: Positive Voltage RegulatorsFahry PramoddyaNo ratings yet
- HPS 100Document2 pagesHPS 100ogtNo ratings yet
- Front Panel Layout: Terminal DetailsDocument2 pagesFront Panel Layout: Terminal DetailsDebaprajnya SahuNo ratings yet
- A4973 Datasheet PDFDocument12 pagesA4973 Datasheet PDFcvbNo ratings yet
- en - E2 Control Panel Technical ManualDocument16 pagesen - E2 Control Panel Technical ManualChrisanto MangubatNo ratings yet
- HPS100 - 120 - 150-US DatasheetDocument2 pagesHPS100 - 120 - 150-US DatasheetKCB TechnologiesNo ratings yet
- 8 Ac Motors: Otating Agnetic IeldDocument23 pages8 Ac Motors: Otating Agnetic Ieldsaim buttNo ratings yet
- Three-Phase Inverter Reference Design Using Gate Driver With Built-In Dead Time InsertionDocument28 pagesThree-Phase Inverter Reference Design Using Gate Driver With Built-In Dead Time InsertionWilliam BelascoNo ratings yet
- Full-Bridge PWM Motor Driver: Description Features and BenefitsDocument12 pagesFull-Bridge PWM Motor Driver: Description Features and BenefitsNik SaykoNo ratings yet
- Valve Position Control Valve Position Feedback: Close OpenDocument1 pageValve Position Control Valve Position Feedback: Close OpenDũng LêNo ratings yet
- VIPer100 NewDocument20 pagesVIPer100 NewDarvin VargheseNo ratings yet
- Caja Fusible KiaDocument4 pagesCaja Fusible KiaAndrésNo ratings yet
- Thank You: For Choosing Another Quality Product From Amperes ElectronicsDocument12 pagesThank You: For Choosing Another Quality Product From Amperes ElectronicsElla MariaNo ratings yet
- Gc8.Gc9 Calpella Uma 990304 Vinafix - VNDocument48 pagesGc8.Gc9 Calpella Uma 990304 Vinafix - VNKulvender KumarNo ratings yet
- KDC Nke-10123 Murata IsolationTransformersDocument8 pagesKDC Nke-10123 Murata IsolationTransformersVíctor FaucheretNo ratings yet
- BN44-00554B PD32GV0Document3 pagesBN44-00554B PD32GV0Devorador De PecadosNo ratings yet
- Non-Synchronous PWM Boost Controller: General DescriptionDocument10 pagesNon-Synchronous PWM Boost Controller: General DescriptionMuller tubeNo ratings yet
- KBVF 13Document44 pagesKBVF 13DamianHerreraNo ratings yet
- Vacuum Pump Project PresentationDocument5 pagesVacuum Pump Project PresentationAlexandru Robert DumbravăNo ratings yet
- Tlm-1903 Service ManualDocument40 pagesTlm-1903 Service ManualdaldoggyNo ratings yet
- AudioTechnika 2000 - SeriesDocument62 pagesAudioTechnika 2000 - SeriesandryNo ratings yet
- 1000W Intelligent Single Output Battery Charger: SeriesDocument6 pages1000W Intelligent Single Output Battery Charger: SeriesgustavoNo ratings yet
- Multimode Controller For SMPS: FeaturesDocument51 pagesMultimode Controller For SMPS: FeaturesMahdiNo ratings yet
- Atess Hps30 - 150 DatasheetDocument2 pagesAtess Hps30 - 150 Datasheetdashmaba02No ratings yet
- STR 6XXX SeriesDocument2 pagesSTR 6XXX SeriesGabriel LatiuNo ratings yet
- Ps 229Document11 pagesPs 229Skate38No ratings yet
- 02 - Line and Motor Modules Booksize - OkDocument43 pages02 - Line and Motor Modules Booksize - OkMilan KrisanNo ratings yet
- BH PSW-Series EDocument8 pagesBH PSW-Series EpeefincaNo ratings yet
- Microcontrolador ViperDocument23 pagesMicrocontrolador ViperAlvaro Javier Baños RiveraNo ratings yet
- Non-Synchronous PWM Boost Controller: General DescriptionDocument10 pagesNon-Synchronous PWM Boost Controller: General DescriptionMuller tubeNo ratings yet
- IEC CONIIETI 2013Document19 pagesIEC CONIIETI 2013Jorge Lazo GonzalesNo ratings yet
- AM26LS30PCDocument14 pagesAM26LS30PCwilmer1973No ratings yet
- Specification Mapping and Control For QoS AdaptatiDocument33 pagesSpecification Mapping and Control For QoS AdaptatiluongktdtNo ratings yet
- Ewili14 Submission 19Document7 pagesEwili14 Submission 19luongktdtNo ratings yet
- Grift Visualizing 2006Document73 pagesGrift Visualizing 2006luongktdtNo ratings yet
- Sic Driver Board SchematicDocument1 pageSic Driver Board Schematicluongktdt100% (2)
- Sec 3ph 11 Obc Evb PFC Bom RohsDocument4 pagesSec 3ph 11 Obc Evb PFC Bom RohsluongktdtNo ratings yet
- Sec 3ph 11 Obc Evb LLC Bom Rohs - Rev0Document3 pagesSec 3ph 11 Obc Evb LLC Bom Rohs - Rev0luongktdtNo ratings yet
- Easy To Use Power Bank Solution (EZPBS) Integrated Chip With Two Ports OutputDocument16 pagesEasy To Use Power Bank Solution (EZPBS) Integrated Chip With Two Ports OutputluongktdtNo ratings yet
- EV Charging: Power Electronics at The PumpDocument3 pagesEV Charging: Power Electronics at The PumpluongktdtNo ratings yet
- Iris/Zoom/Focus/ Day-Night Switching Drive Controller: Cmos LsiDocument16 pagesIris/Zoom/Focus/ Day-Night Switching Drive Controller: Cmos LsiluongktdtNo ratings yet
- Bluetooth® Low Energy Wireless Network Coprocessor: Bluenrg-2NDocument47 pagesBluetooth® Low Energy Wireless Network Coprocessor: Bluenrg-2NluongktdtNo ratings yet
- Digital To Analog Converters (DAC) : T. Venkatappa RaoDocument42 pagesDigital To Analog Converters (DAC) : T. Venkatappa RaoMohit MittalNo ratings yet
- Ees06 MSP430 GpioDocument20 pagesEes06 MSP430 GpioasdsdNo ratings yet
- Ema 5Document596 pagesEma 5PCGNo ratings yet
- Bluetooth Bee Manual PDFDocument14 pagesBluetooth Bee Manual PDFArturo F Calcina VNo ratings yet
- DX DiagDocument35 pagesDX Diagfreddygamer 545No ratings yet
- A Project Report Home Automation Prepared in Partial FulfillmentDocument6 pagesA Project Report Home Automation Prepared in Partial FulfillmentVasu ThakurNo ratings yet
- Lab 2 - Transistor BiasDocument12 pagesLab 2 - Transistor Biascrackintheshat100% (1)
- Amplifier Transistors: NPN SiliconDocument6 pagesAmplifier Transistors: NPN SilicondiegooliveiraEENo ratings yet
- Standard Label MW Ioh 2022Document11 pagesStandard Label MW Ioh 2022Febry Hisbullah NurmanNo ratings yet
- OPTOELEKTRONIKADocument4 pagesOPTOELEKTRONIKAkenan halilcevicNo ratings yet
- System x3250 M5Document51 pagesSystem x3250 M5bangtopi1234No ratings yet
- Discrete Time Systems and Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersDocument2 pagesDiscrete Time Systems and Signal Processing - Lecture Notes, Study Material and Important Questions, AnswersM.V. TVNo ratings yet
- Lecture 1 - MOSFETsDocument92 pagesLecture 1 - MOSFETsnqwvch8dcdNo ratings yet
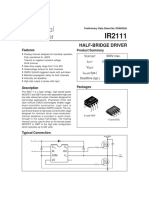
- Half-Bridge Driver Ir2111 PDFDocument8 pagesHalf-Bridge Driver Ir2111 PDFRida DTNo ratings yet
- C 90 Service ManualFM/AM COMPACT DISC PLAYERDocument89 pagesC 90 Service ManualFM/AM COMPACT DISC PLAYERMalay K GhoshNo ratings yet
- Up & Uc - LessonPlanDocument2 pagesUp & Uc - LessonPlanKannan AlagumuthiahNo ratings yet
- GSM Repair / Maint Policy-Telecom / Allied EqptDocument9 pagesGSM Repair / Maint Policy-Telecom / Allied EqptImran AzizNo ratings yet
- VHDL Digital NAND Gate Program.Document14 pagesVHDL Digital NAND Gate Program.Muchamad Aldi AnantaNo ratings yet
- Instrumentation and Control Assignment - I MMEDocument3 pagesInstrumentation and Control Assignment - I MMETom JerryNo ratings yet
- SmpsDocument6 pagesSmpsMadhu46dNo ratings yet
- BM DS8910F Model 993rack Mounted Storage SystemDocument58 pagesBM DS8910F Model 993rack Mounted Storage SystemTim OSullivanNo ratings yet
- Power Converters ProblemsDocument2 pagesPower Converters Problemsramya sreeNo ratings yet
- 2nd-Summative Ict9Document2 pages2nd-Summative Ict9JenniferCarabotMacasNo ratings yet
- EE-391 Manual 02Document68 pagesEE-391 Manual 02Deb Kumar SarkarNo ratings yet
- Simulation of Five Bus SystemDocument29 pagesSimulation of Five Bus SystemakshaykarandeNo ratings yet
- Xeon E5 1600 2600 Vol 1 DatasheetDocument258 pagesXeon E5 1600 2600 Vol 1 DatasheetMilan HorvathNo ratings yet