You might also like
- ISX Rocker Arm Torque PDFDocument13 pagesISX Rocker Arm Torque PDFBrangan Hulley100% (3)
- CivilBay Structural Engineering Spreadsheet Tutorial on Anchorage DesignDocument153 pagesCivilBay Structural Engineering Spreadsheet Tutorial on Anchorage Designhatot100% (1)
- The Prediction of Helicopter Rotor Hover Performance Using A Prescribed Wake AnalysisDocument56 pagesThe Prediction of Helicopter Rotor Hover Performance Using A Prescribed Wake AnalysiszmajchekNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- NACA Report of The Grumman F8F-1Document48 pagesNACA Report of The Grumman F8F-1tomay777No ratings yet
- Thrust VectoringDocument27 pagesThrust Vectoringjames mathewsNo ratings yet
- RAC Qualifying ExamDocument9 pagesRAC Qualifying ExamVirg Sci-hiNo ratings yet
- Coiled Tubing Unit for Well Servicing and Sand RemovalDocument40 pagesCoiled Tubing Unit for Well Servicing and Sand RemovalPratimaNo ratings yet
- Potsdam1 AHS04Document13 pagesPotsdam1 AHS04amir_karimiNo ratings yet
- Controlling Rush-Drag in Paper MachinesDocument5 pagesControlling Rush-Drag in Paper MachinesAhmed AsforaNo ratings yet
- United States Patent: Forward-Reverse and BrakeDocument6 pagesUnited States Patent: Forward-Reverse and Brakejai2009No ratings yet
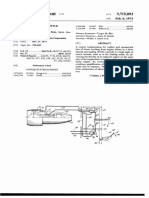
- United States Patent (19) : Bock (45) Feb. 5, 1974Document7 pagesUnited States Patent (19) : Bock (45) Feb. 5, 1974gorgiNo ratings yet
- Active Vorticity Control in A Shear Flow Using A Flapping FoilDocument21 pagesActive Vorticity Control in A Shear Flow Using A Flapping FoilAntonio Martín AlcántaraNo ratings yet
- Automatically Regulated C.V.T. in Wind PDFDocument12 pagesAutomatically Regulated C.V.T. in Wind PDFمهيمن فالح حمدNo ratings yet
- Flight MeasurementsDocument29 pagesFlight MeasurementsewiontkoNo ratings yet
- Lubricants 11 00026Document22 pagesLubricants 11 00026lk700615No ratings yet
- United States Patent (19) : Van DykeDocument5 pagesUnited States Patent (19) : Van DykegorgiNo ratings yet
- Axial FlowDocument11 pagesAxial FlowKtst EngNo ratings yet
- Aeronautical Research CouncllDocument42 pagesAeronautical Research CouncllAli JhemiNo ratings yet
- CFD Computation of The Savonius RotorDocument10 pagesCFD Computation of The Savonius RotorBattle SagaNo ratings yet
- US20140133980A1Document12 pagesUS20140133980A1雷黎明No ratings yet
- Krasnov Aerodynamics PDFDocument513 pagesKrasnov Aerodynamics PDFmisterno94No ratings yet
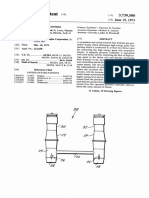
- A/a/t/teau 3-A/wa/: Aug. 6, 1968 H. P. Zmmerman, JR 3,395,671Document5 pagesA/a/t/teau 3-A/wa/: Aug. 6, 1968 H. P. Zmmerman, JR 3,395,671Rodrigo ContrerasNo ratings yet
- 1 s2.0 S2092678218303352 MainDocument7 pages1 s2.0 S2092678218303352 MainSướng Đẹp TraiNo ratings yet
- Dynamic performance of field-regulated synchronous machines analyzedDocument7 pagesDynamic performance of field-regulated synchronous machines analyzedSoumyabrataPatraNo ratings yet
- Laboratory Experimental Testing of InertersDocument6 pagesLaboratory Experimental Testing of Inertersนิติพล ไชยวงศ์No ratings yet
- Design of Optimum PropellerDocument7 pagesDesign of Optimum Propellerkarol8037100% (1)
- Discrete Sliding Mode Controller For Pressure Control With An Electrohydraulic ServovalveDocument5 pagesDiscrete Sliding Mode Controller For Pressure Control With An Electrohydraulic Servovalvejhoar1987No ratings yet
- The Calculation of The Spanwise Loading Sweptback Wings With Flaps or All-Moving Tips at Subsonic Speeds ofDocument43 pagesThe Calculation of The Spanwise Loading Sweptback Wings With Flaps or All-Moving Tips at Subsonic Speeds ofIbn e siddiqueNo ratings yet
- Compliance with Flutter RegulationsDocument32 pagesCompliance with Flutter RegulationsLadislao PazmanyNo ratings yet
- iet-gtd.2016.2027Document10 pagesiet-gtd.2016.2027Sujit KumarNo ratings yet
- O ... ... - g:SE:SDocument8 pagesO ... ... - g:SE:Sjai2009No ratings yet
- NASA NTRS Archive 19690012107Document5 pagesNASA NTRS Archive 19690012107a7510378No ratings yet
- Robust Longitudinal Axis Flight Control For An Aircraft With Thrust VectoringDocument14 pagesRobust Longitudinal Axis Flight Control For An Aircraft With Thrust VectoringNaveen LalNo ratings yet
- Fluids 08 00201Document13 pagesFluids 08 00201Zoltán PetróNo ratings yet
- Aerodynamics For Engineers: Fourth EditionDocument9 pagesAerodynamics For Engineers: Fourth EditionHafeed YounisNo ratings yet
- CFD Method Calculates Seal Rotordynamic CoefficientsDocument12 pagesCFD Method Calculates Seal Rotordynamic CoefficientsBa1313yNo ratings yet
- Adaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemDocument5 pagesAdaptive Backstepping Sliding Mode Control For Rudder/Fin Joint Roll Stabilization SystemImun Fataa FataaNo ratings yet
- 138 Modeling Stochastic Wind - Loads - On Vertical - Axis Wind Turbines VEERS SANDIADocument20 pages138 Modeling Stochastic Wind - Loads - On Vertical - Axis Wind Turbines VEERS SANDIAMariela TisseraNo ratings yet
- 1 OnlineDocument21 pages1 OnlineBành Đức MinhNo ratings yet
- NASA TM X Memorandum On Mercury Red Stone Booster Problems 1975069144Document30 pagesNASA TM X Memorandum On Mercury Red Stone Booster Problems 1975069144LohnJittleNo ratings yet
- Wind Tunnel Tests on Floating Offshore Wind Turbines: A Proposal for Hardware-in-the-Loop Approach to Validate Numerical CodesDocument13 pagesWind Tunnel Tests on Floating Offshore Wind Turbines: A Proposal for Hardware-in-the-Loop Approach to Validate Numerical Codespandavision76No ratings yet
- PowerEstimationDocument6 pagesPowerEstimationFabián AcevedoNo ratings yet
- Particle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemDocument11 pagesParticle Swarm Optimization Based Sliding Mode Control of Variable Speed Wind Energy Conversion SystemBukan Syahrul Yasin LimpoNo ratings yet
- Freewake 1Document9 pagesFreewake 1Fab MorlandoNo ratings yet
- A Ground Test Rocket Thrust Measurement SystemDocument7 pagesA Ground Test Rocket Thrust Measurement SystemAerojet Rocketdyne RS-25No ratings yet
- Paulos CycleDocument35 pagesPaulos CycleBonar StepanusNo ratings yet
- Modeling and Design of Control System For Variable Speed Wind Turbine in All Operating RegionDocument7 pagesModeling and Design of Control System For Variable Speed Wind Turbine in All Operating RegionAbdul RafayNo ratings yet
- Renewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof SobczakDocument8 pagesRenewable Energy: Konrad Kacprzak, Grzegorz Liskiewicz, Krzysztof Sobczakhassan zohairNo ratings yet
- Derakhshandeh, J.F. (2016)Document15 pagesDerakhshandeh, J.F. (2016)Fernando Augusto Alves MendesNo ratings yet
- Flow Pattern, Circulation Velocity AND Pressure Loss in Loop ReactorDocument6 pagesFlow Pattern, Circulation Velocity AND Pressure Loss in Loop ReactorAhmadNo ratings yet
- Plasma ActuatorDocument9 pagesPlasma ActuatorNIKHIL ATUL NARALENo ratings yet
- Us2641140 PDFDocument12 pagesUs2641140 PDFbelchior alvaroNo ratings yet
- Meccanismo T.R.Document6 pagesMeccanismo T.R.Marco Raneo PezzanoNo ratings yet
- Dynamic Wake1Document12 pagesDynamic Wake1Abdulqadir Aziz Singapore WalaNo ratings yet
- 1997 pachterQFTDocument18 pages1997 pachterQFTCumhur ÖzbaşNo ratings yet
- CFD WaterjetDocument8 pagesCFD WaterjettafocanNo ratings yet
- Bayley 1970Document7 pagesBayley 1970Huynhiemquoc80No ratings yet
- Numerical Investigation of The Flow Around A Feather Shuttlecock With RotationDocument7 pagesNumerical Investigation of The Flow Around A Feather Shuttlecock With Rotationmuhd luqmanNo ratings yet
- Energy Conversion and ManagementDocument13 pagesEnergy Conversion and ManagementMohammadreza NaghaviNo ratings yet
- Aerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLDocument6 pagesAerodynamics of A Multi-Element Airfoil Near Ground: LL LL LLVimal ChandNo ratings yet
- Sdre Control With Nonlinear Feedforward Compensation For A Small Unmanned HelicopterDocument11 pagesSdre Control With Nonlinear Feedforward Compensation For A Small Unmanned HelicopterVijay ChandarNo ratings yet
- Propeller in Vortex RingDocument16 pagesPropeller in Vortex Ringmondy.egNo ratings yet
- Turbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsFrom EverandTurbulent Buoyant Jets and Plumes: HMT: The Science & Applications of Heat and Mass Transfer. Reports, Reviews & Computer ProgramsNo ratings yet
- United States Design Patent (10) Patent No.: US D444,512SDocument5 pagesUnited States Design Patent (10) Patent No.: US D444,512SgorgiNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0188423 A1Document20 pagesPatent Application Publication (10) Pub - No .: US 2021/0188423 A1gorgiNo ratings yet
- Patent Application Publication: (19) United StatesDocument25 pagesPatent Application Publication: (19) United StatesgorgiNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0139140 A1Document69 pagesPatent Application Publication (10) Pub - No .: US 2021/0139140 A1gorgiNo ratings yet
- United States Patent (19) (11) Patent Number: Des. 356,990Document7 pagesUnited States Patent (19) (11) Patent Number: Des. 356,990gorgiNo ratings yet
- Horizontal tail for aircraft generates increased pitch controlDocument9 pagesHorizontal tail for aircraft generates increased pitch controlgorgiNo ratings yet
- United States Patent: (75) Inventor: Robert E. Johnson, Alamitos, Calif., 33. Egm I. DADocument7 pagesUnited States Patent: (75) Inventor: Robert E. Johnson, Alamitos, Calif., 33. Egm I. DAgorgiNo ratings yet
- United States Patent (19) : Propulsion System ControlDocument12 pagesUnited States Patent (19) : Propulsion System ControlgorgiNo ratings yet
- United States Patent: 73) Assignee Mcdonnell Douglas CorporationDocument9 pagesUnited States Patent: 73) Assignee Mcdonnell Douglas CorporationgorgiNo ratings yet
- United States Patent (19) : (73) Assignee: Mcdonnell Douglas Corporation, STDocument13 pagesUnited States Patent (19) : (73) Assignee: Mcdonnell Douglas Corporation, STgorgiNo ratings yet
- Stall control device for swept wingsDocument4 pagesStall control device for swept wingsgorgiNo ratings yet
- April 15, 1969: R. G., McintyreDocument9 pagesApril 15, 1969: R. G., McintyregorgiNo ratings yet
- European Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftDocument23 pagesEuropean Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftgorgiNo ratings yet
- Aircraft Lightning Protection System DesignDocument14 pagesAircraft Lightning Protection System DesigngorgiNo ratings yet
- United States Patent (19) : JohnsonDocument6 pagesUnited States Patent (19) : JohnsongorgiNo ratings yet
- US3870253Document8 pagesUS3870253gorgiNo ratings yet
- Foldable Wing Extensions Reduce Aircraft Storage FootprintDocument16 pagesFoldable Wing Extensions Reduce Aircraft Storage FootprintgorgiNo ratings yet
- European Patent Specification B64D 1/06, B64D 7/08: Printed by Jouve, 75001 PARIS (FR)Document12 pagesEuropean Patent Specification B64D 1/06, B64D 7/08: Printed by Jouve, 75001 PARIS (FR)gorgiNo ratings yet
- European Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftDocument31 pagesEuropean Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftgorgiNo ratings yet
- TEPZZ 45 877B - T: European Patent SpecificationDocument32 pagesTEPZZ 45 877B - T: European Patent SpecificationgorgiNo ratings yet
- European Patent Application: A Wing Tip DeviceDocument16 pagesEuropean Patent Application: A Wing Tip DevicegorgiNo ratings yet
- Counter-rotating fan propulsion system with variable blade row spacingDocument29 pagesCounter-rotating fan propulsion system with variable blade row spacinggorgiNo ratings yet
- Elop Amps: Strategic ISR For Manned and Unmanned AircraftDocument2 pagesElop Amps: Strategic ISR For Manned and Unmanned AircraftgorgiNo ratings yet
- TEPZZ 4 - 54 6B - T: European Patent SpecificationDocument24 pagesTEPZZ 4 - 54 6B - T: European Patent SpecificationgorgiNo ratings yet
- TEPZZ 48 Z64A - T: European Patent ApplicationDocument22 pagesTEPZZ 48 Z64A - T: European Patent ApplicationgorgiNo ratings yet
- ELOP Condor 2: Long Range Oblique Photography SystemDocument2 pagesELOP Condor 2: Long Range Oblique Photography SystemgorgiNo ratings yet
- Decision: Matter Of: Airbus Helicopters, Inc. File: DateDocument23 pagesDecision: Matter Of: Airbus Helicopters, Inc. File: DategorgiNo ratings yet
- ELOP Condor TAC: Tactical Aerial Reconnaissance Photography SystemDocument2 pagesELOP Condor TAC: Tactical Aerial Reconnaissance Photography SystemgorgiNo ratings yet
- Solid Carbide Thread Mills ChartDocument2 pagesSolid Carbide Thread Mills Chartlintang madi sudiroNo ratings yet
- T105 Engineering ThermodynamicsDocument14 pagesT105 Engineering ThermodynamicsLogesh WaranNo ratings yet
- Partslist - A025 - Backhoe 205Document7 pagesPartslist - A025 - Backhoe 205Павел ХромовNo ratings yet
- Assignments-Design of Dam Appurtenant Structures-2022Document2 pagesAssignments-Design of Dam Appurtenant Structures-2022Marew Getie100% (1)
- OpI 200500591 PDFDocument372 pagesOpI 200500591 PDFShahnam GhasediNo ratings yet
- Type of GearsDocument6 pagesType of Gearskamalezwan100% (1)
- Fluid Mechanics Lec 2 & 3Document79 pagesFluid Mechanics Lec 2 & 3Mutahir KhattakNo ratings yet
- PropertiesDocument26 pagesPropertiesafaq ahmad khanNo ratings yet
- Tribological Properties of Hot Forged Al2024-Tib2 In-Situ CompositeDocument7 pagesTribological Properties of Hot Forged Al2024-Tib2 In-Situ CompositeVivekananda SubramaniNo ratings yet
- (101, 201) Pendulum Flap Valve SZ 30Document9 pages(101, 201) Pendulum Flap Valve SZ 30Bata ZivanovicNo ratings yet
- Felipe Sist Completo 1711071552Document3 pagesFelipe Sist Completo 1711071552FelipeGonzalesNo ratings yet
- Printer Friendly Page: Close WindowDocument2 pagesPrinter Friendly Page: Close WindowFerdnand RiverNo ratings yet
- Section 7 - Separation EquipmentDocument9 pagesSection 7 - Separation Equipmentlulis171No ratings yet
- Course On Structural StabilityDocument3 pagesCourse On Structural StabilityVenkatesh ReddyNo ratings yet
- BSC (Maths), Dmit (Aero. Engg,), Me (Aero. Engg., Iisc), PHD (Engg.) Hod-Aero@Dayanandasagar - EduDocument4 pagesBSC (Maths), Dmit (Aero. Engg,), Me (Aero. Engg., Iisc), PHD (Engg.) Hod-Aero@Dayanandasagar - EdumanojNo ratings yet
- Testing Fire-ProtectionDocument2 pagesTesting Fire-Protectionmia murciaNo ratings yet
- ILD ArchDocument4 pagesILD ArchKalagotla Nagi reddyNo ratings yet
- A New Approach To Boost Pressure and EGR Rate Control Development For HD Truck Engines With VGTDocument12 pagesA New Approach To Boost Pressure and EGR Rate Control Development For HD Truck Engines With VGTRanjith Reddy KalluriNo ratings yet
- 1920 Level M Applied Math Exam Related Materials T2 Wk3Document19 pages1920 Level M Applied Math Exam Related Materials T2 Wk3ayahNo ratings yet
- Continuum MechanicsDocument4 pagesContinuum Mechanicsdwarika2006No ratings yet
- Tower 52M-20M2-4legDocument33 pagesTower 52M-20M2-4legBechir Ousseini GarbaNo ratings yet
- Ix Est42 BlockdiagramDocument34 pagesIx Est42 BlockdiagramBranko AndricNo ratings yet
- Mass Concrete Vibrator RequirementsDocument5 pagesMass Concrete Vibrator RequirementsRahul ChaudharyNo ratings yet
- Lecture 32-2-Rigid Body Dynamics 2-2Document6 pagesLecture 32-2-Rigid Body Dynamics 2-2nhNo ratings yet
- Computational Analysis of Naturally Oscillating Tandem Square and Circular Bluff Bodies A GPU Based Immersed Boundary Lattice Boltzmann ApproachDocument24 pagesComputational Analysis of Naturally Oscillating Tandem Square and Circular Bluff Bodies A GPU Based Immersed Boundary Lattice Boltzmann ApproachEhsan AdeebNo ratings yet
- 06-833 Reset Tool InstructionsDocument4 pages06-833 Reset Tool InstructionsAnoir100% (2)