You might also like
- European Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftDocument23 pagesEuropean Patent Specification: Rotating Proprotor Arrangement For A Tiltrotor AircraftgorgiNo ratings yet
- US20140133980A1Document12 pagesUS20140133980A1雷黎明No ratings yet
- European Patent Specification B64C 27/32: Printed by Jouve, 75001 PARIS (FR)Document12 pagesEuropean Patent Specification B64C 27/32: Printed by Jouve, 75001 PARIS (FR)Amir BahramiNo ratings yet
- European Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftDocument31 pagesEuropean Patent Specification: Hybrid Propulsion Drive Train System For Tiltrotor AircraftgorgiNo ratings yet
- TEPZZ - Z - 5Z5B - T: European Patent SpecificationDocument22 pagesTEPZZ - Z - 5Z5B - T: European Patent SpecificationAmir BahramiNo ratings yet
- United States Patent: (10) Patent No.: (45) Date of PatentDocument7 pagesUnited States Patent: (10) Patent No.: (45) Date of PatentAaron LuoNo ratings yet
- TEPZZ 7 7 - 64B - T: European Patent SpecificationDocument19 pagesTEPZZ 7 7 - 64B - T: European Patent SpecificationMuhammadNo ratings yet
- EP21160517NWB1Document16 pagesEP21160517NWB1frank saruhanNo ratings yet
- EP3431017B1Document193 pagesEP3431017B1Swatantra AhujaNo ratings yet
- Engine Pylon PDFDocument9 pagesEngine Pylon PDFSergioMelgarejoNo ratings yet
- Ep 21191997 Nwa 1Document27 pagesEp 21191997 Nwa 1Eray KoçNo ratings yet
- VTOL Tilt Rotor Equations of Motion, Trim and LinealizationDocument15 pagesVTOL Tilt Rotor Equations of Motion, Trim and LinealizationRafael TrujilloNo ratings yet
- EP3112258B1Document56 pagesEP3112258B1邓帅No ratings yet
- US20070262197A1Document24 pagesUS20070262197A1slamet wardoyoNo ratings yet
- EP0631553B1Document29 pagesEP0631553B1wen longNo ratings yet
- United States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005Document10 pagesUnited States Patent: Perlo Et Al. (45) Date of Patent: Dec. 20, 2005tristanNo ratings yet
- EP1070663A2Document4 pagesEP1070663A2atabNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2013/0256465 A1Document10 pagesPatent Application Publication (10) Pub. No.: US 2013/0256465 A1gorgiNo ratings yet
- European Patent Application: Foldable Wing Extensions For AircraftDocument16 pagesEuropean Patent Application: Foldable Wing Extensions For AircraftgorgiNo ratings yet
- US5304036Document24 pagesUS5304036wen longNo ratings yet
- US20140302938A1Document15 pagesUS20140302938A1雷黎明No ratings yet
- US3889885Document7 pagesUS3889885Claudinei MayerNo ratings yet
- D2 - Ep3847097b1Document22 pagesD2 - Ep3847097b1Anonymous 4OgzTeINo ratings yet
- Dolly Invention FieldDocument21 pagesDolly Invention FieldAhmedNo ratings yet
- Patente de SimuladorDocument19 pagesPatente de SimuladorSebastian SandovalNo ratings yet
- Simulation of Longitudinal Stability of Helicopter in Forward FlightDocument20 pagesSimulation of Longitudinal Stability of Helicopter in Forward FlightanmarhamidaliNo ratings yet
- United States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Document26 pagesUnited States Patent (16) Patent N6 US 8,226,291 B2: Zamirowski Et Al. (45) Date of Patent: Jul. 24, 2012Soma GhoshNo ratings yet
- Modeling and Backstepping-Based Nonlinear ControlDocument9 pagesModeling and Backstepping-Based Nonlinear Controloussama sadkiNo ratings yet
- United States Patent (191Document7 pagesUnited States Patent (191wewewewNo ratings yet
- US20110274550A1Document9 pagesUS20110274550A1雷黎明No ratings yet
- Bell Helicopter Stabilizer BarDocument6 pagesBell Helicopter Stabilizer Barjorge paez100% (1)
- United States Patent (19) : Bock (45) Feb. 5, 1974Document7 pagesUnited States Patent (19) : Bock (45) Feb. 5, 1974gorgiNo ratings yet
- Patent Application Publication (10) Pub. No.: US 2013/0157528A1Document7 pagesPatent Application Publication (10) Pub. No.: US 2013/0157528A1Tâm DươngNo ratings yet
- TEPZZ 44 - 67ZB - T: European Patent SpecificationDocument24 pagesTEPZZ 44 - 67ZB - T: European Patent SpecificationgorgiNo ratings yet
- EP2561285B1Document18 pagesEP2561285B1Claudio SollarenNo ratings yet
- TEPZZ 45 877B - T: European Patent SpecificationDocument32 pagesTEPZZ 45 877B - T: European Patent SpecificationgorgiNo ratings yet
- EP06808858NWB1Document13 pagesEP06808858NWB1keikhosravy.mNo ratings yet
- Passive Pendulum Body: A Novel eVTOL Configuration: Shima Eiji Tsutsumi Seiji FUJIMOTO Keiichiro ITO HiroyukiDocument15 pagesPassive Pendulum Body: A Novel eVTOL Configuration: Shima Eiji Tsutsumi Seiji FUJIMOTO Keiichiro ITO HiroyukiOliver RailaNo ratings yet
- Installation and Rigging ProceduresDocument15 pagesInstallation and Rigging ProceduresRene QueirozNo ratings yet
- Aerodynamic Characteristics of A Quadcopter With Propellers: Articles You May Be Interested inDocument8 pagesAerodynamic Characteristics of A Quadcopter With Propellers: Articles You May Be Interested inWidyahsri EllaNo ratings yet
- Ep03257006nwb1 PDFDocument9 pagesEp03257006nwb1 PDFalexmontellNo ratings yet
- Tepzz 8Z 95B - T: European Patent SpecificationDocument10 pagesTepzz 8Z 95B - T: European Patent SpecificationjorgeNo ratings yet
- TEPZZ Z67 6 A - T: European Patent ApplicationDocument17 pagesTEPZZ Z67 6 A - T: European Patent ApplicationAbishek AbhNo ratings yet
- 07a82104 HelicopterengineeringDocument7 pages07a82104 HelicopterengineeringSharanya ThirichinapalliNo ratings yet
- EP1539573B1Document21 pagesEP1539573B1雷黎明No ratings yet
- Fault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControlDocument6 pagesFault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControladilsondissoNo ratings yet
- 2009 - Us20090095526a1 - Method and Apparatus For Managing Rod Changes in Horizontal Directional DrillDocument22 pages2009 - Us20090095526a1 - Method and Apparatus For Managing Rod Changes in Horizontal Directional DrillCường Nguyễn QuốcNo ratings yet
- PropellerTheory PDFDocument4 pagesPropellerTheory PDFSri Harsha ChallaNo ratings yet
- Ata 31Document139 pagesAta 31ouss.cfpncNo ratings yet
- 07a82104 HelicopterengineeringDocument7 pages07a82104 Helicopterengineeringanand1540No ratings yet
- EP0354242B1Document71 pagesEP0354242B1Junaid YusfzaiNo ratings yet
- 3 DOF Helicopter - User ManualDocument23 pages3 DOF Helicopter - User ManualMurilloMaganNo ratings yet
- Local Momentum Theory and Its Application To The Rotary WingDocument9 pagesLocal Momentum Theory and Its Application To The Rotary WingaqstaxNo ratings yet
- Propeller TheoryDocument4 pagesPropeller TheoryArunSutharNo ratings yet
- United States Patent: (12) (10) Patent No.: US 7,051,824 B1Document23 pagesUnited States Patent: (12) (10) Patent No.: US 7,051,824 B1Agnivesh PandeyNo ratings yet
- Data For Heli Rotor ValidationDocument135 pagesData For Heli Rotor ValidationKaradiasNo ratings yet
- Fractal Impeller Agitator PatentDocument21 pagesFractal Impeller Agitator PatentDilip MauryaNo ratings yet
- EP1321438B1Document10 pagesEP1321438B1Alessandro PatanèNo ratings yet
- Igor Sikorsky Historical ArchivesDocument8 pagesIgor Sikorsky Historical ArchivesCAP History LibraryNo ratings yet
- Helicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftFrom EverandHelicopter Flight Dynamics: Including a Treatment of Tiltrotor AircraftNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0139140 A1Document69 pagesPatent Application Publication (10) Pub - No .: US 2021/0139140 A1gorgiNo ratings yet
- Patent Application Publication: (19) United StatesDocument25 pagesPatent Application Publication: (19) United StatesgorgiNo ratings yet
- United States Patent (19) (11) Patent Number: Des. 356,990Document7 pagesUnited States Patent (19) (11) Patent Number: Des. 356,990gorgiNo ratings yet
- United States Design Patent (10) Patent No.: US D444,512SDocument5 pagesUnited States Design Patent (10) Patent No.: US D444,512SgorgiNo ratings yet
- Patent Application Publication (10) Pub - No .: US 2021/0188423 A1Document20 pagesPatent Application Publication (10) Pub - No .: US 2021/0188423 A1gorgiNo ratings yet
- United States Patent: JennyDocument8 pagesUnited States Patent: JennygorgiNo ratings yet
- United States Patent: 73) Assignee Mcdonnell Douglas CorporationDocument9 pagesUnited States Patent: 73) Assignee Mcdonnell Douglas CorporationgorgiNo ratings yet
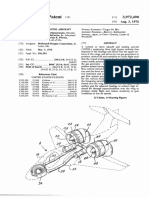
- United States Patent (19) : (45) Sept. 16, 1975Document14 pagesUnited States Patent (19) : (45) Sept. 16, 1975gorgiNo ratings yet
- United States Patent: Appl. No. 853,670Document9 pagesUnited States Patent: Appl. No. 853,670gorgiNo ratings yet
- April 15, 1969: R. G., McintyreDocument9 pagesApril 15, 1969: R. G., McintyregorgiNo ratings yet
- United States Patent (19) : Propulsion System ControlDocument12 pagesUnited States Patent (19) : Propulsion System ControlgorgiNo ratings yet
- United States Patent: (75) Inventor: Robert E. Johnson, Alamitos, Calif., 33. Egm I. DADocument7 pagesUnited States Patent: (75) Inventor: Robert E. Johnson, Alamitos, Calif., 33. Egm I. DAgorgiNo ratings yet
- US3370810Document4 pagesUS3370810gorgiNo ratings yet
- US3870253Document8 pagesUS3870253gorgiNo ratings yet
- United States Patent (19) : Bock (45) Feb. 5, 1974Document7 pagesUnited States Patent (19) : Bock (45) Feb. 5, 1974gorgiNo ratings yet
- United States Patent (19) : (73) Assignee: Mcdonnell Douglas Corporation, STDocument13 pagesUnited States Patent (19) : (73) Assignee: Mcdonnell Douglas Corporation, STgorgiNo ratings yet
- European Patent Specification B64D 1/06, B64D 7/08: Printed by Jouve, 75001 PARIS (FR)Document12 pagesEuropean Patent Specification B64D 1/06, B64D 7/08: Printed by Jouve, 75001 PARIS (FR)gorgiNo ratings yet
- United States Patent (19) : JohnsonDocument6 pagesUnited States Patent (19) : JohnsongorgiNo ratings yet
- TEPZZ 99Z - 8B - T: European Patent SpecificationDocument29 pagesTEPZZ 99Z - 8B - T: European Patent SpecificationgorgiNo ratings yet
- TEPZZ 45 877B - T: European Patent SpecificationDocument32 pagesTEPZZ 45 877B - T: European Patent SpecificationgorgiNo ratings yet
- Decision: Matter Of: Airbus Helicopters, Inc. File: DateDocument23 pagesDecision: Matter Of: Airbus Helicopters, Inc. File: DategorgiNo ratings yet
- European Patent Application: Foldable Wing Extensions For AircraftDocument16 pagesEuropean Patent Application: Foldable Wing Extensions For AircraftgorgiNo ratings yet
- TEPZZ 48 Z64A - T: European Patent ApplicationDocument22 pagesTEPZZ 48 Z64A - T: European Patent ApplicationgorgiNo ratings yet
- European Patent Application: A Wing Tip DeviceDocument16 pagesEuropean Patent Application: A Wing Tip DevicegorgiNo ratings yet
- Elop Amps: Strategic ISR For Manned and Unmanned AircraftDocument2 pagesElop Amps: Strategic ISR For Manned and Unmanned AircraftgorgiNo ratings yet
- ELOP Condor TAC: Tactical Aerial Reconnaissance Photography SystemDocument2 pagesELOP Condor TAC: Tactical Aerial Reconnaissance Photography SystemgorgiNo ratings yet
- ELOP Condor 2: Long Range Oblique Photography SystemDocument2 pagesELOP Condor 2: Long Range Oblique Photography SystemgorgiNo ratings yet
- EASA OEB Final Report Eurocopter AS365 EC 155 B B1!02!08022012Document41 pagesEASA OEB Final Report Eurocopter AS365 EC 155 B B1!02!08022012Sezgin BayrakNo ratings yet
- Heli Begineer GuideDocument225 pagesHeli Begineer GuideDragos CalinescuNo ratings yet
- GenII Main Rotor Sikorsky S76 Pushrod 1.00Document23 pagesGenII Main Rotor Sikorsky S76 Pushrod 1.00agripinaluzmilaaNo ratings yet
- E13 Blade 450 X Exploded PDFDocument5 pagesE13 Blade 450 X Exploded PDFexplodingfistNo ratings yet
- 212 MM CH62Document46 pages212 MM CH62Carlos ViverosNo ratings yet
- Resumo Best EngDocument2 pagesResumo Best EngAlex GomesNo ratings yet
- Lockheed Helicopter GyroDocument298 pagesLockheed Helicopter Gyrojorge paezNo ratings yet
- Lesson 2 - Helicopter FlightDocument37 pagesLesson 2 - Helicopter Flightsaumya irugalbandaraNo ratings yet
- Instruction Manual: Digital Proportional Radio Control SystemDocument34 pagesInstruction Manual: Digital Proportional Radio Control SystemCorban MihaiNo ratings yet
- Mod 001Document64 pagesMod 001Likes BekuNo ratings yet
- AW139 00 Chapter 62Document56 pagesAW139 00 Chapter 62JamesNo ratings yet
- The Official Helicopter Blue Book PDFDocument382 pagesThe Official Helicopter Blue Book PDFCapt Greg50% (2)
- Helipal KDS Flymentor 3D ManualDocument35 pagesHelipal KDS Flymentor 3D ManualNunoFigueiredo0% (1)
- CSP Com 5 - I0r17tr09002pDocument938 pagesCSP Com 5 - I0r17tr09002probiny50% (2)
- S-76C+ Post 511 VXP Diagnostic ManualDocument86 pagesS-76C+ Post 511 VXP Diagnostic ManualBruno Gonçalves100% (1)
- Section 8 - Flight Controls PDFDocument20 pagesSection 8 - Flight Controls PDFrobbertmd100% (1)
- Die Lösungen Müssen Manuell Überpüft Werden. Die Buchstaben Stimmen Nicht Mehr ÜbereinDocument16 pagesDie Lösungen Müssen Manuell Überpüft Werden. Die Buchstaben Stimmen Nicht Mehr ÜbereinMário MineiroNo ratings yet
- FM 3-04-203 Fundamentals of FlightDocument386 pagesFM 3-04-203 Fundamentals of FlightericngwNo ratings yet
- HeliguideDocument166 pagesHeliguideapi-26338869100% (2)
- Piccolo SimulatorDocument54 pagesPiccolo SimulatorPaMe LiTaNo ratings yet
- CopterX CX-3X2000 ManualDocument16 pagesCopterX CX-3X2000 ManualIsmailMouaouedNo ratings yet
- Flight ControlDocument139 pagesFlight ControlEthan PintoNo ratings yet
- Alert Service Bulletin: ASB MBB-BK117-40A-115Document11 pagesAlert Service Bulletin: ASB MBB-BK117-40A-115Samantha Carrascal SilvaNo ratings yet
- BELL412 SeriesDocument12 pagesBELL412 SeriesmurtazaNo ratings yet
- Helicopter MCQDocument31 pagesHelicopter MCQMussa LucasNo ratings yet
- EC135 Classic B1 R06EN 05 - Flight Control.22911.2020 11 03.printableDocument95 pagesEC135 Classic B1 R06EN 05 - Flight Control.22911.2020 11 03.printableTitou GoltzNo ratings yet
- 412 MM CH04 PDFDocument16 pages412 MM CH04 PDFpancaNo ratings yet
- Planuri GyrocopterDocument21 pagesPlanuri GyrocopterDRAGOS BILGANo ratings yet
- 206 Asb 93 74Document5 pages206 Asb 93 74Kraven YagamyNo ratings yet