You might also like
- Appendix Dspace and Real Time Interface in SimulinkDocument9 pagesAppendix Dspace and Real Time Interface in SimulinkohmprakashNo ratings yet
- Exp1 dSPACEDocument19 pagesExp1 dSPACEVisheshNo ratings yet
- Xilinx WorkbookDocument94 pagesXilinx WorkbookdmctekNo ratings yet
- DSpace TutorialDocument55 pagesDSpace TutorialCristobalPonceSalazar100% (1)
- The Open Service Node (OSN) A Practical Approach To Getting StartedDocument11 pagesThe Open Service Node (OSN) A Practical Approach To Getting StartedJuly MinNo ratings yet
- Dspace Solutions For Control TutorialDocument4 pagesDspace Solutions For Control Tutorialअभिषेक कुमार उपाध्यायNo ratings yet
- Signal Generation Using TMS320C6713 ProcessorDocument5 pagesSignal Generation Using TMS320C6713 ProcessorkaoutarNo ratings yet
- dSPACE DS1103 Control Workstation Tutorial and DC Motor Speed ControlDocument60 pagesdSPACE DS1103 Control Workstation Tutorial and DC Motor Speed ControljayantkhurpadeNo ratings yet
- Real Time DSPDocument4 pagesReal Time DSPMuhammadNo ratings yet
- Lab 0Document8 pagesLab 0huutan86No ratings yet
- DSP Lab Manual 15-11-2016 PDFDocument73 pagesDSP Lab Manual 15-11-2016 PDFsmdeepajpNo ratings yet
- Final Mapi Lab ManualDocument44 pagesFinal Mapi Lab ManualRamachandra ReddyNo ratings yet
- Dspace Tutorial 01172007Document4 pagesDspace Tutorial 01172007hsss500No ratings yet
- Scicos Vs SimulinkDocument65 pagesScicos Vs SimulinkaalbieroNo ratings yet
- Quick Start for TMS320VC33 DSP Starter KitDocument6 pagesQuick Start for TMS320VC33 DSP Starter Kitvalivali30No ratings yet
- MPMC Lab ManualDocument97 pagesMPMC Lab ManualDjangoNo ratings yet
- Tce TutorialDocument12 pagesTce TutorialMuhammad RehanNo ratings yet
- EE-421 Digital System Design Laboratory Manual: Group MembersDocument34 pagesEE-421 Digital System Design Laboratory Manual: Group MembersMuhammad SohaibNo ratings yet
- Signal Generation Using TMS320C6713 ProcessorDocument6 pagesSignal Generation Using TMS320C6713 ProcessorRAMESH BABU EEENo ratings yet
- EECS 151/251A ASIC Lab 2: RTL-level simulation of FIR filterDocument12 pagesEECS 151/251A ASIC Lab 2: RTL-level simulation of FIR filterNguyen Van ToanNo ratings yet
- EDI System WorkshopDocument57 pagesEDI System WorkshopStudentNo ratings yet
- Data Stage ETL QuestionDocument11 pagesData Stage ETL Questionrameshgrb2000No ratings yet
- Microprocessors Lab Manual OriginalDocument81 pagesMicroprocessors Lab Manual OriginalChaitanya YmrNo ratings yet
- Practical Workbook (DSD)Document33 pagesPractical Workbook (DSD)ayeshaNo ratings yet
- Digital Signal Processing Lab: CODE NO: EC05177 List of ExperimentsDocument33 pagesDigital Signal Processing Lab: CODE NO: EC05177 List of ExperimentsSai SaranyaNo ratings yet
- Using FireBase, FireDac, DataSnap, Rest, Wifi, and FireMonkeyDocument54 pagesUsing FireBase, FireDac, DataSnap, Rest, Wifi, and FireMonkeyMarceloMoreiraCunhaNo ratings yet
- Sap FaqDocument31 pagesSap FaqsakergayenrNo ratings yet
- Synopsys Syn 2016Document15 pagesSynopsys Syn 2016Himanshu PatraNo ratings yet
- NetSentinel Security ServerDocument9 pagesNetSentinel Security ServerKiran DasNo ratings yet
- MP Manual ProgramsDocument226 pagesMP Manual Programssriramachandran201150% (2)
- Matlab and Ccs Interface Manual With Filter ProgramDocument65 pagesMatlab and Ccs Interface Manual With Filter ProgramSugumar Sar DuraiNo ratings yet
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument13 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationYounes Ait El MaatiNo ratings yet
- ADS Tutorial: A Beginners Tutorial: Modes of OperationDocument23 pagesADS Tutorial: A Beginners Tutorial: Modes of OperationShakil Ahmed ChowdhuryNo ratings yet
- For (I 0 I Outputsize I++) (Y (I) 0 For (J 0 J Kernelsize J++) (Y (I) + X (I - J) H (J) ) )Document7 pagesFor (I 0 I Outputsize I++) (Y (I) 0 For (J 0 J Kernelsize J++) (Y (I) + X (I - J) H (J) ) )Andy OrtizNo ratings yet
- Common Issues in DatastageDocument12 pagesCommon Issues in Datastagesunipulicherla100% (1)
- Exercise 1 RequirementsDocument5 pagesExercise 1 Requirementshark_a_battleNo ratings yet
- SAS Programming Guidelines Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesFrom EverandSAS Programming Guidelines Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesNo ratings yet
- RTDX - Real Time Data EXchangeDocument5 pagesRTDX - Real Time Data EXchangecommunicationridersNo ratings yet
- Monitor and Log DataDocument6 pagesMonitor and Log Dataleonardo favio enriqueNo ratings yet
- Sap BasisDocument41 pagesSap Basisapi-3766700100% (3)
- DSP ManualDocument88 pagesDSP ManualhifiabbuNo ratings yet
- UPGRADE SAP R/3 TO ECC 6.0Document22 pagesUPGRADE SAP R/3 TO ECC 6.0barbarabolognesiNo ratings yet
- RTSLab 1Document9 pagesRTSLab 1Andrew WalleyNo ratings yet
- 333 - Lab - 6 - 2017 Clarified 4 - 8 - 17Document8 pages333 - Lab - 6 - 2017 Clarified 4 - 8 - 17abdul nurudeenNo ratings yet
- Basis Certification 2003Document19 pagesBasis Certification 2003Amier Omar Al MousyNo ratings yet
- Digital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingFrom EverandDigital Signal Processing System Design: LabVIEW-Based Hybrid ProgrammingRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Python Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreFrom EverandPython Advanced Programming: The Guide to Learn Python Programming. Reference with Exercises and Samples About Dynamical Programming, Multithreading, Multiprocessing, Debugging, Testing and MoreNo ratings yet
- Interview Questions for IBM Mainframe DevelopersFrom EverandInterview Questions for IBM Mainframe DevelopersRating: 1 out of 5 stars1/5 (1)
- SAP interface programming with RFC and VBA: Edit SAP data with MS AccessFrom EverandSAP interface programming with RFC and VBA: Edit SAP data with MS AccessNo ratings yet
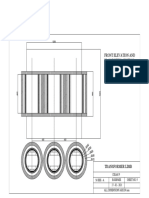
- LimbsectionalviewDocument1 pageLimbsectionalviewkiran preethiNo ratings yet
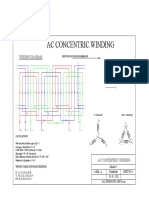
- AC CONCENTRIC WINDING DIAGRAM AND CALCULATIONSDocument1 pageAC CONCENTRIC WINDING DIAGRAM AND CALCULATIONSkiran preethiNo ratings yet
- Ac 1Document1 pageAc 1kiran preethiNo ratings yet
- Tutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: CodeDocument7 pagesTutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: Codekiran preethiNo ratings yet
- Tutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: CodeDocument13 pagesTutorial Questions On Fuzzy Logic 1. A Triangular Member Function Shown in Figure Is To Be Made in MATLAB. Write A Function. Answer: Codekiran preethiNo ratings yet
- Experiment 1Document10 pagesExperiment 1kiran preethiNo ratings yet
- DLL-Q3 Week3Document23 pagesDLL-Q3 Week3Crisalline SantosNo ratings yet
- Friendship With RizalDocument3 pagesFriendship With RizalAJ PunzalanNo ratings yet
- ACKNOWLEDGEMENTDocument4 pagesACKNOWLEDGEMENTJazel Mabilanga RobleNo ratings yet
- SCM WiproDocument2 pagesSCM WiproAshadeep ParidaNo ratings yet
- Cambridge IGCSE (9-1) : Chemistry For Examination From 2023Document4 pagesCambridge IGCSE (9-1) : Chemistry For Examination From 2023jenifaNo ratings yet
- 3 5 PronounsDocument3 pages3 5 PronounsPratyuusha PunjabiNo ratings yet
- Hive Is A Data Warehouse Infrastructure Tool To Process Structured Data in HadoopDocument30 pagesHive Is A Data Warehouse Infrastructure Tool To Process Structured Data in HadooparavindNo ratings yet
- DLL - All Subjects 2 - Q3 - W7 - D2Document8 pagesDLL - All Subjects 2 - Q3 - W7 - D2jeane1pauline1pau1acNo ratings yet
- Teaching With The Revised Bloom'Staxonomy: Janet Giesen Faculty Development and Instructional Design CenterDocument47 pagesTeaching With The Revised Bloom'Staxonomy: Janet Giesen Faculty Development and Instructional Design CenterAndhika Sevent D'ThaamaaNo ratings yet
- Life 2 Teachers - Guide - PDF Versión 1Document369 pagesLife 2 Teachers - Guide - PDF Versión 1Kevin HernandezNo ratings yet
- Syllabus For 11thDocument3 pagesSyllabus For 11thirfannoble100% (1)
- Exam2 ReviewDocument54 pagesExam2 ReviewSurbhie Kalia ChebaNo ratings yet
- Beige and Black Simple Thesis Defense PresentationDocument19 pagesBeige and Black Simple Thesis Defense Presentationkyla escotoNo ratings yet
- Annex-A.1.1-List of ICT Equipment, Goods, Support Services and Consulting ServicesDocument5 pagesAnnex-A.1.1-List of ICT Equipment, Goods, Support Services and Consulting ServicesBee BlancNo ratings yet
- Improve English Confidence QuestionnaireDocument4 pagesImprove English Confidence QuestionnaireIrina PădureNo ratings yet
- Metode NevilleDocument3 pagesMetode NevilleIir MnemonisNo ratings yet
- Homework Aula 2Document3 pagesHomework Aula 2Elvio Alvitez TandaypanNo ratings yet
- SDS Expense TrackerDocument13 pagesSDS Expense TrackermekidesNo ratings yet
- Physical Addressing - Error Handling PDFDocument14 pagesPhysical Addressing - Error Handling PDFGopal AgarwalNo ratings yet
- Data Link Layer Framing, Error Control, and Flow ControlDocument15 pagesData Link Layer Framing, Error Control, and Flow ControlAkshay MehtaNo ratings yet
- Classroom Procedures ChecklistDocument9 pagesClassroom Procedures Checklistln_gao100% (1)
- The Revival of Buddhist Monasticism in Medieval ChinaDocument289 pagesThe Revival of Buddhist Monasticism in Medieval Chinahannahji100% (1)
- Myhill Nerode TheormDocument38 pagesMyhill Nerode Theormabida rasoolNo ratings yet
- M4 L2 - Improving CallsDocument5 pagesM4 L2 - Improving CallsHilary BennettNo ratings yet
- MS Telugu Style GuideDocument60 pagesMS Telugu Style Guidedeewanand0% (1)
- Wuolah Free Katherine Mansfield BlissDocument17 pagesWuolah Free Katherine Mansfield Blissinmaculadaferia23No ratings yet
- John Levi Martin - The Explanation of Social Action-Oxford University Press (2011) PDFDocument411 pagesJohn Levi Martin - The Explanation of Social Action-Oxford University Press (2011) PDFMarcio Barbosa100% (2)
- 9093 English Language Paper 1 Specimen AnswersDocument18 pages9093 English Language Paper 1 Specimen AnswersMohamed AlamariNo ratings yet
- Social Status and Class in The Great GatsbyDocument1 pageSocial Status and Class in The Great GatsbySally GuanNo ratings yet
- Juliana Gámez 905 First Conditional ActivityDocument2 pagesJuliana Gámez 905 First Conditional Activityjuliana gamez bustos0% (1)