You might also like
- Power Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringFrom EverandPower Measurements Under Nonsinusoidal Conditions : A Thesis in Electrical EngineeringNo ratings yet
- Modelling and Analysis of Electromechanical Stress in Transformers Caused by Short-CircuitsDocument6 pagesModelling and Analysis of Electromechanical Stress in Transformers Caused by Short-CircuitsJunaid YNo ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- Dr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonerDocument6 pagesDr. M.A. Mueller, Dr. J.R. Bumby and Prof. E. SpoonernakllkNo ratings yet
- 2013 GALLINABENASC CAEConference2013Document4 pages2013 GALLINABENASC CAEConference2013Tung ManhNo ratings yet
- Townley Andrew 09Document17 pagesTownley Andrew 09Luis Gustavo ReisNo ratings yet
- Thesis PiezoelectricDocument7 pagesThesis Piezoelectricnibaditapalmerpaterson100% (2)
- MFL Compendium 002Document59 pagesMFL Compendium 002kingston67% (3)
- Han Cui. Modeling, Implementation, and Simulation of Two - Winding Plate InductorDocument219 pagesHan Cui. Modeling, Implementation, and Simulation of Two - Winding Plate InductorsmdealerNo ratings yet
- Force CalculationDocument8 pagesForce CalculationAbirami RajagopalNo ratings yet
- Articol 9Document6 pagesArticol 9Constantin DorinelNo ratings yet
- A Precision, Low-Cost Vibrating Sample MagnetometerDocument11 pagesA Precision, Low-Cost Vibrating Sample Magnetometervleventv100% (1)
- Analysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sDocument12 pagesAnalysis, Design, and Optimization of Spiral Inductors and Transformers For Si RF IC'sRF_RAJANo ratings yet
- Generator End-Winding Vibration AnalysisDocument8 pagesGenerator End-Winding Vibration AnalysisMohsen Vafaei Zadeh100% (1)
- The Impact of Eddy Currents in The Transformer WindingsDocument32 pagesThe Impact of Eddy Currents in The Transformer WindingsCharles Tayamen, Jr.No ratings yet
- Rabin FurbDocument6 pagesRabin Furbluis900000No ratings yet
- Research of The Loss of Power Transformer StructurDocument8 pagesResearch of The Loss of Power Transformer StructurbenlahnecheNo ratings yet
- Electromagnetic Interference Issues of Power Electronics Systems With Wide Band Gap Semiconductor DevicesDocument6 pagesElectromagnetic Interference Issues of Power Electronics Systems With Wide Band Gap Semiconductor DevicesDinesh KumarNo ratings yet
- Computation of The Mutual Inductance Between Circular Filaments With Coil Misalignment PDFDocument5 pagesComputation of The Mutual Inductance Between Circular Filaments With Coil Misalignment PDFphithucNo ratings yet
- Analysis of Power Loss and Improved Simulation Method of A High Frequency Dual-Buck Full-Bridge InverterDocument18 pagesAnalysis of Power Loss and Improved Simulation Method of A High Frequency Dual-Buck Full-Bridge InverteranujNo ratings yet
- Proceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51Document12 pagesProceedings of The Institution of Mechanical Engineers, Part D - Journal of Automobile Engineering-2008-Neubauer-1141-51neerajhmenonNo ratings yet
- Applied Mathematical Modelling: Kerem Karakoc, Afzal Suleman, Edward J. ParkDocument12 pagesApplied Mathematical Modelling: Kerem Karakoc, Afzal Suleman, Edward J. ParkNingyu YangNo ratings yet
- Eddy Current BrakesDocument14 pagesEddy Current BrakesSurya Pratap Singh78% (18)
- A Lumped Winding Model For Use in Transformer Models For Circuit SimulationDocument16 pagesA Lumped Winding Model For Use in Transformer Models For Circuit SimulationLucio BianchiNo ratings yet
- Ijaiem 2014 10 10 16Document4 pagesIjaiem 2014 10 10 16International Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Rotor Fault Diagnosis Using External Search Coils Voltage AnalysisDocument5 pagesRotor Fault Diagnosis Using External Search Coils Voltage AnalysisAhcene BouzidaNo ratings yet
- tmp244D TMPDocument12 pagestmp244D TMPFrontiersNo ratings yet
- ASEE 2011 PaperDocument10 pagesASEE 2011 PaperrivalharudianNo ratings yet
- Industrial Applications of Power ElectronicsDocument5 pagesIndustrial Applications of Power ElectronicsRadu GodinaNo ratings yet
- Transformer Joints FE Analysis Using Pseudo-Source TechniqueDocument4 pagesTransformer Joints FE Analysis Using Pseudo-Source TechniqueRavi RajNo ratings yet
- Short CKT Force in IPBDocument5 pagesShort CKT Force in IPBRavishankar.AzadNo ratings yet
- Study of Abnormal Electrical Phenomena Effects Transformers: Dong, X. S. Liu, Y Wang, Wang, N.C. Line, E.L.Document2 pagesStudy of Abnormal Electrical Phenomena Effects Transformers: Dong, X. S. Liu, Y Wang, Wang, N.C. Line, E.L.nasirNo ratings yet
- A Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsDocument10 pagesA Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsGuru NathanNo ratings yet
- Applsci 10 03370Document15 pagesApplsci 10 03370vivek dongareNo ratings yet
- Detrimental Effects of Capacitors in Distribution Networks in The Presence of Harmonic PollutionDocument5 pagesDetrimental Effects of Capacitors in Distribution Networks in The Presence of Harmonic PollutionLuis CifuentesNo ratings yet
- Emi-Free DC-DC Buck Converter For AerospaceDocument4 pagesEmi-Free DC-DC Buck Converter For AerospaceInternational Journal of Research in Engineering and TechnologyNo ratings yet
- Analysis of Dynamic Behaviour of Electric Power Systems WithDocument4 pagesAnalysis of Dynamic Behaviour of Electric Power Systems WithayalmalikiNo ratings yet
- International Journal of Machine Tools & Manufacture: Guojun Zhang, Zhi Chen, Zhen Zhang, Yu Huang, Wuyi Ming, He LiDocument13 pagesInternational Journal of Machine Tools & Manufacture: Guojun Zhang, Zhi Chen, Zhen Zhang, Yu Huang, Wuyi Ming, He LiÐɤ Suman ChatterjeeNo ratings yet
- Year1 ElectromechanicsDocument72 pagesYear1 Electromechanicscesare.alcesteNo ratings yet
- 2009 EMC Industrial Inverter Aime CN57Document2 pages2009 EMC Industrial Inverter Aime CN57Juan Gil RocaNo ratings yet
- Author's Accepted ManuscriptDocument20 pagesAuthor's Accepted ManuscriptÐɤ Suman Chatterjee100% (1)
- Berkeley Thesis EecsDocument4 pagesBerkeley Thesis EecsJackie Gold100% (2)
- Energy Conversion and Management: S.M. AithalDocument7 pagesEnergy Conversion and Management: S.M. AithalSravan KumarNo ratings yet
- Energies: Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator Using Taguchi ApproachDocument17 pagesEnergies: Design and Implement of Three-Phase Permanent-Magnet Synchronous Wave Generator Using Taguchi ApproachVô ƯuNo ratings yet
- Thesis Using PiezoelectricDocument4 pagesThesis Using Piezoelectricbsr22d1d100% (2)
- Transformer Internal Fault Modeling in ATP: Abstract-An Important Aspect To Investigate When DesigningDocument6 pagesTransformer Internal Fault Modeling in ATP: Abstract-An Important Aspect To Investigate When DesigningAkash VermaNo ratings yet
- Experimental and Numerical Analysis of A Transducer For The Generation of Guided WavesDocument9 pagesExperimental and Numerical Analysis of A Transducer For The Generation of Guided Wavesdavood abbasiNo ratings yet
- New Dead-Time Compensation Method of Power Inverter Using Carrier Based Sinusoidal Pulse-Width ModulationDocument12 pagesNew Dead-Time Compensation Method of Power Inverter Using Carrier Based Sinusoidal Pulse-Width ModulationNikolas AugustoNo ratings yet
- Dual Reversible Transformer Model For The Calculation of Low-Frequency TransientsDocument9 pagesDual Reversible Transformer Model For The Calculation of Low-Frequency Transientsval111No ratings yet
- Part Winding Resonance: Demerit of Interleaved High-Voltage Transformer WindingDocument9 pagesPart Winding Resonance: Demerit of Interleaved High-Voltage Transformer WindingJojojoNo ratings yet
- 1 s2.0 S2215098623001131 MainDocument10 pages1 s2.0 S2215098623001131 MainJaja LocoNo ratings yet
- Energies 12 01312 PDFDocument19 pagesEnergies 12 01312 PDFrajeshNo ratings yet
- 08 Koprivica Milovanovic DjekicDocument13 pages08 Koprivica Milovanovic DjekicDante FilhoNo ratings yet
- 1 s2.0 S0888327021001059 MainDocument17 pages1 s2.0 S0888327021001059 Main1392297140sNo ratings yet
- Magnetics TransformerDocument8 pagesMagnetics TransformerSaravananPalaniNo ratings yet
- A Wavelet Power Based Algorithm For Synchronous Generator ProtectionDocument6 pagesA Wavelet Power Based Algorithm For Synchronous Generator ProtectionsunitharajababuNo ratings yet
- Armature Reaction Field and Inductance of Coreless Moving-Coil Tubular Linear MachineDocument10 pagesArmature Reaction Field and Inductance of Coreless Moving-Coil Tubular Linear MachineemnilyNo ratings yet
- 15 ThreePhase Common ModeDocument12 pages15 ThreePhase Common ModeEzeldeen AgoryNo ratings yet
- Electromagnetic Field and Total Loss Analysis of Transformers by Finite Element MethodDocument10 pagesElectromagnetic Field and Total Loss Analysis of Transformers by Finite Element MethodAkash VermaNo ratings yet
- Insulation Oil FilledDocument8 pagesInsulation Oil FilledxandreayNo ratings yet
- Q-FactorMeas On LC CircuitsDocument5 pagesQ-FactorMeas On LC CircuitsxandreayNo ratings yet
- AFouineau IEEE Magnetics Inductance Resistance Windings REVISION-AFDocument12 pagesAFouineau IEEE Magnetics Inductance Resistance Windings REVISION-AFxandreayNo ratings yet
- Core LossesDocument7 pagesCore LossesxandreayNo ratings yet
- Maxwell Vs Mat LabDocument1 pageMaxwell Vs Mat LabxandreayNo ratings yet
- Natural VentilationDocument1 pageNatural VentilationxandreayNo ratings yet
- GIT Guide: Initial ConfigurationDocument5 pagesGIT Guide: Initial ConfigurationxandreayNo ratings yet
- Wind Tunnel DomainDocument2 pagesWind Tunnel DomainxandreayNo ratings yet
- Scilab Arduino Temperature Monitoring TutorialDocument14 pagesScilab Arduino Temperature Monitoring TutorialxandreayNo ratings yet
- Automating The FEMM-Analysis of A CoilDocument12 pagesAutomating The FEMM-Analysis of A CoilNeacsu Florin-MariusNo ratings yet
- Openfoam Simulation For Electromagnetic Problems: Zhe HuangDocument54 pagesOpenfoam Simulation For Electromagnetic Problems: Zhe HuangxandreayNo ratings yet
- Airflow FormulasDocument4 pagesAirflow FormulasYoesof HilabyNo ratings yet
- A Look Inside Ico FoamDocument13 pagesA Look Inside Ico Foamcelso_junior_21No ratings yet
- T1 SeriesDocument1 pageT1 SeriesFabricio GonçalvesNo ratings yet
- Mine ExplosionDocument18 pagesMine Explosionbongisisa9100% (1)
- Deep Learning (R20A6610)Document46 pagesDeep Learning (R20A6610)barakNo ratings yet
- Module 1.MMWDocument20 pagesModule 1.MMWJimmy DegayNo ratings yet
- Vastu ShastraDocument36 pagesVastu ShastraAnjanaya Lamani0% (1)
- Class Notes On Gravitation (Physics 152) : Galileo Analyzes A Cannonball TrajectoryDocument4 pagesClass Notes On Gravitation (Physics 152) : Galileo Analyzes A Cannonball TrajectorythestudierNo ratings yet
- Book Review When We Cease To Understand The World,' by Benjamín Labatut - The New York TimesDocument4 pagesBook Review When We Cease To Understand The World,' by Benjamín Labatut - The New York Timeselias100% (1)
- ME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW6 SolutionDocument6 pagesME:5160 (58:160) Intermediate Mechanics of Fluids Fall 2021 - HW6 SolutionDiki AgungNo ratings yet
- Applsci 1985066 Peer Review v1Document19 pagesApplsci 1985066 Peer Review v1mlupoae2003No ratings yet
- Biochem Laboratory ReviewerDocument6 pagesBiochem Laboratory Reviewer202370092No ratings yet
- Sampling 180318081140Document29 pagesSampling 180318081140iqra javed100% (1)
- 22 - GIS Testing PDFDocument9 pages22 - GIS Testing PDFwaqas_a_shaikh4348No ratings yet
- Lamis Theorem Gate Notes 21Document4 pagesLamis Theorem Gate Notes 21Shashikant kumar 21ME15No ratings yet
- Boiler Other Steam Plant AccessoriesDocument5 pagesBoiler Other Steam Plant AccessoriesCollano M. Noel RogieNo ratings yet
- Lecture 2Document33 pagesLecture 2eng fourmNo ratings yet
- Practica 3Document4 pagesPractica 3Fernxndo BxsxntesNo ratings yet
- Topic 10: Electric Potential: Conceptual Physics Textbook, CPO Textbook, CP Lab Book and CPO LabDocument9 pagesTopic 10: Electric Potential: Conceptual Physics Textbook, CPO Textbook, CP Lab Book and CPO LabJoanne Pedrito GunanNo ratings yet
- Correlation vs. CausationDocument13 pagesCorrelation vs. CausationdanielmugaboNo ratings yet
- Patente US8261586Document22 pagesPatente US8261586William TerryNo ratings yet
- 1.3 Hydraulic PumpsDocument15 pages1.3 Hydraulic Pumpsdoan lucNo ratings yet
- Lecture 5. Chemical Reaction (Part 2)Document38 pagesLecture 5. Chemical Reaction (Part 2)Dione Gale NavalNo ratings yet
- Bioresource Technology: Oscar Pardo-Planas, Hasan K. Atiyeh, John R. Phillips, Clint P. Aichele, Sayeed MohammadDocument8 pagesBioresource Technology: Oscar Pardo-Planas, Hasan K. Atiyeh, John R. Phillips, Clint P. Aichele, Sayeed Mohammadmohsen ranjbarNo ratings yet
- Verb Morphological Generator For TeluguDocument11 pagesVerb Morphological Generator For TeluguSasi Raja Sekhar DokkaraNo ratings yet
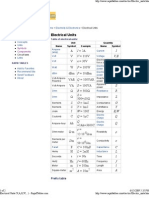
- Electrical UnitsDocument2 pagesElectrical Unitsevtoma100% (1)
- Effect of MG Content On Microstructure andDocument12 pagesEffect of MG Content On Microstructure andMohamed RamadanNo ratings yet
- User Manual Quality Espresso MachinesDocument56 pagesUser Manual Quality Espresso MachinesEdward GarzónNo ratings yet
- Weld Acceptance Criteria1Document1 pageWeld Acceptance Criteria1sankarNo ratings yet
- Advanced Manufacturing Processes (ALL SLIDES Gaurav Arora)Document259 pagesAdvanced Manufacturing Processes (ALL SLIDES Gaurav Arora)faizNo ratings yet
- Horiba ABX Micros 60 - Technical Manual 2 PDFDocument205 pagesHoriba ABX Micros 60 - Technical Manual 2 PDFAniela RosalesNo ratings yet
- AGN 234 - Generating Set Assembly - AlignmentDocument6 pagesAGN 234 - Generating Set Assembly - AlignmentbaljeetjatNo ratings yet