You might also like
- Chapter 2 - Review DynamicsDocument19 pagesChapter 2 - Review DynamicsTam PhamNo ratings yet
- Chapter - Review DynamicsDocument19 pagesChapter - Review DynamicstoanNo ratings yet
- Analysis of Chaos in Double PendulumDocument6 pagesAnalysis of Chaos in Double PendulumBikram PaulNo ratings yet
- Chapter 5 - Stability Exploration MethodsDocument49 pagesChapter 5 - Stability Exploration MethodsHoàng Thanh ThếNo ratings yet
- 2011.liu Hao, Liu Xinhua, Liu Yongzhi .The Lattice Boltzmann Simulation of Magnetic FluidDocument6 pages2011.liu Hao, Liu Xinhua, Liu Yongzhi .The Lattice Boltzmann Simulation of Magnetic FluidAT8iNo ratings yet
- Dynamic Modeling and Analysis of Inverted Pendulum Using Lagrangian-Differential Transform MethodDocument6 pagesDynamic Modeling and Analysis of Inverted Pendulum Using Lagrangian-Differential Transform MethodRadwa MagdyNo ratings yet
- The Principle and Applications of Bernoulli EquationDocument6 pagesThe Principle and Applications of Bernoulli EquationAndrés Felipe Martínez UrregoNo ratings yet
- Chapter 4 - Transfer FunctionsDocument30 pagesChapter 4 - Transfer FunctionsHoàng Thanh ThếNo ratings yet
- Double PendulumDocument5 pagesDouble PendulumRazvan PricopNo ratings yet
- Dynamics of A Four-Wheeled Mobile Robot With MecanDocument22 pagesDynamics of A Four-Wheeled Mobile Robot With MecanThạnh Cường TrươngNo ratings yet
- Chapter 3-2 - Transfer FunctionDocument30 pagesChapter 3-2 - Transfer Functionhuynhduc12355No ratings yet
- A Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotDocument10 pagesA Neural Network Combined With Sliding Mode Controller For The Two-Wheel Self-Balancing RobotIAES IJAINo ratings yet
- Synchronization, Anti-Synchronization and Hybrid-Synchronization of A Double Pendulum Under The Effect of External ForcesDocument11 pagesSynchronization, Anti-Synchronization and Hybrid-Synchronization of A Double Pendulum Under The Effect of External ForcesInternational Journal of computational Engineering research (IJCER)No ratings yet
- Complete N-Photon Greenberger-Horne-Zeilinger-state Analyzer and Its ApplicationsDocument5 pagesComplete N-Photon Greenberger-Horne-Zeilinger-state Analyzer and Its ApplicationskamasanisNo ratings yet
- IJSRReprintDocument5 pagesIJSRReprintJosh NicolasNo ratings yet
- Pendulo Doble MotorDocument10 pagesPendulo Doble Motorjuan alarconNo ratings yet
- Duart 2017 J. Phys.: Conf. Ser. 792 012081 PDFDocument18 pagesDuart 2017 J. Phys.: Conf. Ser. 792 012081 PDFnick_mafraNo ratings yet
- Quantum Double Double Slit Experiment With Momentum Entangled PhotonsDocument11 pagesQuantum Double Double Slit Experiment With Momentum Entangled PhotonsMELINDA BR GINTINGNo ratings yet
- Simulation Studies of Inverted Pendulum Based On PID ControllersDocument10 pagesSimulation Studies of Inverted Pendulum Based On PID ControllersJuan Manuel MauroNo ratings yet
- Nonlinear Control of The Reaction Wheel PendulumDocument7 pagesNonlinear Control of The Reaction Wheel PendulumJim LowelNo ratings yet
- Adaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessDocument10 pagesAdaptive Control of Mobile Manipulator To Track Horizontal Smooth Curved Apply For Welding ProcessAJER JOURNALNo ratings yet
- Double Pendulum: AnalysisDocument5 pagesDouble Pendulum: AnalysisEji Marie MakamaksNo ratings yet
- 13 - Modeling, Motion Planning, and Control of One-Legged Hopping Robot Actuated by Two ArmsDocument17 pages13 - Modeling, Motion Planning, and Control of One-Legged Hopping Robot Actuated by Two ArmsjowdiverNo ratings yet
- Breakdown of Self-Similarity in Light TransportDocument15 pagesBreakdown of Self-Similarity in Light TransportLoginNo ratings yet
- Nonlinear Control of The Gyroscopic PendulumDocument23 pagesNonlinear Control of The Gyroscopic Pendulumxuanvunguyen8xNo ratings yet
- 6614 CNC 345Document10 pages6614 CNC 345Martino Ojwok AjangnayNo ratings yet
- Lagrangian CoordinatesDocument19 pagesLagrangian Coordinatesjiexing ZhangNo ratings yet
- Book 1990Document7 pagesBook 1990Adel BelhNo ratings yet
- Dynamics With Infinitely Many Time Derivatives and Rolling TachyonsDocument40 pagesDynamics With Infinitely Many Time Derivatives and Rolling Tachyonsapi-28482101No ratings yet
- AP10005 - Physics I AP10008 - University Physics I: Angular MomentumDocument18 pagesAP10005 - Physics I AP10008 - University Physics I: Angular MomentumShibu AlexanderNo ratings yet
- PostreDocument48 pagesPostreesparancito cordobaNo ratings yet
- SPE-189856-MS Analysis and Modeling of Proppant Transport in Inclined Hydraulic FracturesDocument18 pagesSPE-189856-MS Analysis and Modeling of Proppant Transport in Inclined Hydraulic FracturesMuhammed Al-BajriNo ratings yet
- Modal Based Balancing of Rtors Using Differential Evolution AlgorithmDocument7 pagesModal Based Balancing of Rtors Using Differential Evolution AlgorithmJuan Angel Martinez RamirezNo ratings yet
- Slides For Chapter 4 FM1 2023-24Document88 pagesSlides For Chapter 4 FM1 2023-24ABDUL WAHABNo ratings yet
- Lakatos 2018Document8 pagesLakatos 2018Joseph ProstNo ratings yet
- Measurement Technique: Lecture 9 Laplace Transform and LTI Systems Lecturer: Ivan Tomasic, PH.DDocument14 pagesMeasurement Technique: Lecture 9 Laplace Transform and LTI Systems Lecturer: Ivan Tomasic, PH.Deqweqwe eqwewqNo ratings yet
- Application of An Improved Ant Colony Optimization On General - 2012 - Energy PRDocument7 pagesApplication of An Improved Ant Colony Optimization On General - 2012 - Energy PRGiang LêNo ratings yet
- Modeling and Simulation of Inverted Pendulum System Using Matlab: OverviewDocument4 pagesModeling and Simulation of Inverted Pendulum System Using Matlab: OverviewMuhammad Zubair SheikhNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument15 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsjibiteshNo ratings yet
- Nonlinear Dynamic Analysis of Planar Flexible Unde - 2005 - Chinese Journal of ADocument5 pagesNonlinear Dynamic Analysis of Planar Flexible Unde - 2005 - Chinese Journal of ApachterNo ratings yet
- mtm-2020-5-186 Dynamic Analysis of A Four-Bar Linkage MechanismDocument5 pagesmtm-2020-5-186 Dynamic Analysis of A Four-Bar Linkage MechanismMahmood AbuZaidNo ratings yet
- KULPIODocument49 pagesKULPIOesparancito cordobaNo ratings yet
- Kappa MSME PaperDocument93 pagesKappa MSME PapertimkiemnhanhNo ratings yet
- Fuzzy Control of A Real Time Inverted Pendulum SystemDocument9 pagesFuzzy Control of A Real Time Inverted Pendulum SystemFajar KavaleriNo ratings yet
- Inverted Pendulum ProjectDocument10 pagesInverted Pendulum Projectjulien dahrNo ratings yet
- Case Studies On Nonlinear Control Theory of The Inverted PendulumDocument28 pagesCase Studies On Nonlinear Control Theory of The Inverted PendulumDragan ErcegNo ratings yet
- Commun Nonlinear Sci Numer Simulat: H.M. Khanlo, M. Ghayour, S. Ziaei-RadDocument15 pagesCommun Nonlinear Sci Numer Simulat: H.M. Khanlo, M. Ghayour, S. Ziaei-RadDamarla KiranNo ratings yet
- Momentum LabDocument9 pagesMomentum LabVALENTINA JIMENEZ VILARÓNo ratings yet
- Numerical Study of Interaction Between Waves and Floating Body by MPS MethodDocument10 pagesNumerical Study of Interaction Between Waves and Floating Body by MPS MethodlapuNo ratings yet
- An Example of Lagrangian For A Non-Holonomic SystemDocument22 pagesAn Example of Lagrangian For A Non-Holonomic SystemGourab BhattacharyaNo ratings yet
- Triple PendulumDocument9 pagesTriple PendulumSalvador SilveyraNo ratings yet
- Kinematics Modeling of Redundant ManipulatorDocument7 pagesKinematics Modeling of Redundant ManipulatorHung Nguyen-CongNo ratings yet
- JurnalDocument6 pagesJurnalsehati sehatiNo ratings yet
- Mechanisms L3Document40 pagesMechanisms L3ROOSSVELT PRABHU TEACHINGNo ratings yet
- Trajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane CaroDocument11 pagesTrajectory Generation For High Speed Pick-and-Place Robots: Cornelius Barnard, Sébastien Briot, Stéphane Carosifo mohNo ratings yet
- Nonlinear Waves: Emmanuel Kengne Wuming LiuDocument525 pagesNonlinear Waves: Emmanuel Kengne Wuming LiuLuc JeronNo ratings yet
- Transformation Theories For Nonlinear Discrete SystemsDocument28 pagesTransformation Theories For Nonlinear Discrete SystemsHenrry Revollo ZuritaNo ratings yet
- A SPH Simulation On Large-Amplitude Sloshing For Uids in A Two-Dimensional TankDocument9 pagesA SPH Simulation On Large-Amplitude Sloshing For Uids in A Two-Dimensional TankDipankar NathNo ratings yet
- Modeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsDocument10 pagesModeling and Energy-Based Sway Reduction Control For Tower Crane Systems With Double-Pendulum and Spherical-Pendulum EffectsVictor Julián Fernández CarrazanaNo ratings yet
- Introductory Laplace Transform with ApplicationsFrom EverandIntroductory Laplace Transform with ApplicationsRating: 5 out of 5 stars5/5 (1)
- Cortex-M + RTOS整合環境: (Uc/Os Ii + Ewarm)Document48 pagesCortex-M + RTOS整合環境: (Uc/Os Ii + Ewarm)Tam PhamNo ratings yet
- Transfer FunctionDocument62 pagesTransfer FunctionTam PhamNo ratings yet
- Transfer Function - MatlabDocument33 pagesTransfer Function - MatlabTam PhamNo ratings yet
- Ch.03 Chuẩn 1Document29 pagesCh.03 Chuẩn 1Tam PhamNo ratings yet
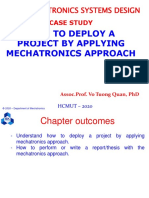
- Chapter 1.1 - Case StudyDocument16 pagesChapter 1.1 - Case StudyTam PhamNo ratings yet
- Chapter 1 - Overview of MechatronicsDocument37 pagesChapter 1 - Overview of MechatronicsTam PhamNo ratings yet
- Tutorial 4 Time ResponseDocument8 pagesTutorial 4 Time ResponseTam PhamNo ratings yet
- Ch.07 Steady-State Error - AssignmentDocument6 pagesCh.07 Steady-State Error - AssignmentTam PhamNo ratings yet
- Examples RootLocusDocument8 pagesExamples RootLocusTam PhamNo ratings yet
- Ch 07-ChuẩnDocument29 pagesCh 07-ChuẩnTam PhamNo ratings yet
- 8-Comparator-Assembler BlockDocument17 pages8-Comparator-Assembler BlockTam PhamNo ratings yet
- Ch.12 Design Via State Space - AssignmentDocument2 pagesCh.12 Design Via State Space - AssignmentTam PhamNo ratings yet
- 9 I2c-SpiDocument40 pages9 I2c-SpiTam PhamNo ratings yet
- 6 TimersDocument36 pages6 TimersTam PhamNo ratings yet
- 5 InterruptsDocument9 pages5 InterruptsTam PhamNo ratings yet
- Dap An de Thi ThuDocument1 pageDap An de Thi ThuTam PhamNo ratings yet
- Date: Group: Duration:: 5 Class HoursDocument6 pagesDate: Group: Duration:: 5 Class HoursTam PhamNo ratings yet
- 4-Analog InputDocument21 pages4-Analog InputTam PhamNo ratings yet
- Date: 7/11/2021 Group: DurationDocument15 pagesDate: 7/11/2021 Group: DurationTam PhamNo ratings yet
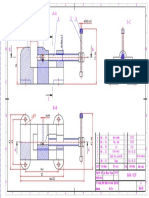
- C09-Geometry and Position TolerancesDocument7 pagesC09-Geometry and Position TolerancesTam PhamNo ratings yet
- Fugazza 92 PDFDocument14 pagesFugazza 92 PDFJemi JollyNo ratings yet
- Mastering Physics Wk2-1Document3 pagesMastering Physics Wk2-1Livardy Wufianto0% (1)
- Lighting TypesDocument31 pagesLighting TypesSwapnali thorveNo ratings yet
- Acid-Base Crime Scene TitrationDocument6 pagesAcid-Base Crime Scene TitrationTracy RojasNo ratings yet
- F3 Maths Marking Scheme 2010Document10 pagesF3 Maths Marking Scheme 2010Andrew ArahaNo ratings yet
- BTG TTC Presentation Albany Panel 2010Document19 pagesBTG TTC Presentation Albany Panel 2010LauraGarciaAyalaNo ratings yet
- Idle Speed: Testing and InspectionDocument1 pageIdle Speed: Testing and InspectionDaniel GarciaNo ratings yet
- 0606 w14 QP 13Document16 pages0606 w14 QP 13AKRAMNo ratings yet
- Solutions To Concepts: Chapter - 3Document16 pagesSolutions To Concepts: Chapter - 3Ramesh BadamNo ratings yet
- Interaction-Driven Instabilities in The Random-Field XXZ ChainDocument12 pagesInteraction-Driven Instabilities in The Random-Field XXZ Chaindemoc29381hkgsc12343No ratings yet
- Qpedia Nov08 Estimating The Effect of Moist Air On Natural Convection Heat TransferDocument7 pagesQpedia Nov08 Estimating The Effect of Moist Air On Natural Convection Heat TransferGe YemoNo ratings yet
- Comparison of Acyclic Steam StimulationDocument108 pagesComparison of Acyclic Steam StimulationMD Redwan IslamNo ratings yet
- SolubilityofKNO3 PDFDocument2 pagesSolubilityofKNO3 PDFMUHAMMAD AKRAMNo ratings yet
- Basic Chemistry TestDocument2 pagesBasic Chemistry TestVaidehi UlaganathanNo ratings yet
- Pizza Box PlansDocument11 pagesPizza Box PlansNasreen KhanNo ratings yet
- Syllabus Abd Books For Semester As Per ManitDocument3 pagesSyllabus Abd Books For Semester As Per ManitAviral UpadhyayNo ratings yet
- Cylindrical Imploding Strong Shock Wave in Uniform Real Dusty GasDocument10 pagesCylindrical Imploding Strong Shock Wave in Uniform Real Dusty GasIJRASETPublicationsNo ratings yet
- 1 2021 Rational Expressions TestDocument4 pages1 2021 Rational Expressions TestSummer SharmaNo ratings yet
- Chap 2Document40 pagesChap 2squishyapply100% (1)
- Zalamea Seminar ReadingsDocument28 pagesZalamea Seminar ReadingstmfjonesNo ratings yet
- Testing and Modeling of Soil-Structure InterfaceDocument10 pagesTesting and Modeling of Soil-Structure InterfaceANKIT KUMARNo ratings yet
- 4 SL Lutchman PresentationDocument30 pages4 SL Lutchman PresentationWissam JarmakNo ratings yet
- Astm E10 23Document15 pagesAstm E10 23misterwhiddenNo ratings yet
- Heating and CoolingDocument45 pagesHeating and CoolingGillianne AndradeNo ratings yet
- Govt. Pilot High School Rawalakot AJK Pre-Board ExamDocument10 pagesGovt. Pilot High School Rawalakot AJK Pre-Board ExamAbdul qadeerNo ratings yet
- en Centrifuge 12 DG SpinDocument50 pagesen Centrifuge 12 DG SpinDodik E. PrasetyoNo ratings yet
- s-20ph10 - Electromagnetic Induction Motional and Induced Emf Faraday's LawDocument26 pagess-20ph10 - Electromagnetic Induction Motional and Induced Emf Faraday's LawsetsunaNo ratings yet
- MechpropsDocument15 pagesMechpropsJeevan RockzzNo ratings yet
- Sheet-Piles Design Using Free-Earth Support MethodDocument7 pagesSheet-Piles Design Using Free-Earth Support MethodJulien MhannaNo ratings yet
- Receptors IntroductionDocument53 pagesReceptors IntroductionSunilNo ratings yet