You might also like
- Delay Line CancelerDocument41 pagesDelay Line Cancelergzb012No ratings yet
- Navigation Sonar For The Ship Operator: Forward Looking Sonars and Multibeam Echosounders ExplainedDocument14 pagesNavigation Sonar For The Ship Operator: Forward Looking Sonars and Multibeam Echosounders ExplainedCatherine RiquelmeNo ratings yet
- Introduction To Synthetic Aperture Sonar PDFDocument27 pagesIntroduction To Synthetic Aperture Sonar PDFnaivedya_mishraNo ratings yet
- Blind Speed and Staggered PRF - Notes FinalDocument6 pagesBlind Speed and Staggered PRF - Notes FinalNelarapuMaheshNo ratings yet
- SPE 71740 A New Generation Crossed Dipole Logging Tool: Design and Case HistoriesDocument16 pagesSPE 71740 A New Generation Crossed Dipole Logging Tool: Design and Case Historiesandy xuuNo ratings yet
- The Truth About Sonar Detection Range and Performance PredictionDocument5 pagesThe Truth About Sonar Detection Range and Performance PredictionsudhaNo ratings yet
- Graphical Representation of Pulsed ArticleDocument6 pagesGraphical Representation of Pulsed ArticleAli RazaNo ratings yet
- Echo SounderDocument13 pagesEcho SounderJackson Gray100% (1)
- Orca Datasheet PDFDocument11 pagesOrca Datasheet PDFaze2010No ratings yet
- Assignment RadarDocument11 pagesAssignment RadarAnand Krishnan P V0% (1)
- Echo SounderDocument7 pagesEcho SounderClyde HugoNo ratings yet
- Bridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VDocument48 pagesBridge Equipment: Capt. S. Swaroop Nautical Faculty B. SC Nautical Science Semester - VMayankNo ratings yet
- RADARDocument27 pagesRADARSandy Bhatti100% (3)
- Echo OptimisationDocument86 pagesEcho OptimisationanuNo ratings yet
- B.,Eqpmnt Sem V-23Document299 pagesB.,Eqpmnt Sem V-23PrasathNo ratings yet
- UT Testing-Section 4Document146 pagesUT Testing-Section 4Charlie Chong100% (1)
- PHY01Document6 pagesPHY01ben harrisNo ratings yet
- Introduction To Synthetic Aperture Sonar: Roy Edgar HansenDocument27 pagesIntroduction To Synthetic Aperture Sonar: Roy Edgar HansenKarelkatNo ratings yet
- Measurement and Calibration Techniques: Normal Beam InspectionDocument4 pagesMeasurement and Calibration Techniques: Normal Beam InspectionKevin HuangNo ratings yet
- Solved Prob. chp1 3rd YearDocument16 pagesSolved Prob. chp1 3rd Yearalifadhil989898No ratings yet
- Radar CommunicationDocument12 pagesRadar CommunicationaushaaNo ratings yet
- Tutorial ProblemsDocument11 pagesTutorial ProblemsMani VrsNo ratings yet
- Side Scan Sonar and Sub-Bottom Profiler SurveyingDocument29 pagesSide Scan Sonar and Sub-Bottom Profiler SurveyingAlfian RomadhoniNo ratings yet
- Height Estimation of Sonar Towfish From Side Scan ImageryDocument6 pagesHeight Estimation of Sonar Towfish From Side Scan ImageryJeevan BabuNo ratings yet
- RadarDocument40 pagesRadar.cheng.100% (1)
- The Pulse-Echo Method - General Remarks 3. Simple Evaluation Methods 4. Evaluation of Diffracted and Converted Sound Waves ReferencesDocument8 pagesThe Pulse-Echo Method - General Remarks 3. Simple Evaluation Methods 4. Evaluation of Diffracted and Converted Sound Waves Referencespaulo cesar hernandez mijangosNo ratings yet
- Characteristics of Piezoelectric TransducersDocument50 pagesCharacteristics of Piezoelectric Transducersextremo1No ratings yet
- Analog OscilloscopeDocument4 pagesAnalog OscilloscopeA RNo ratings yet
- Geophysical Survey ResearchDocument19 pagesGeophysical Survey Researchcharles IkeNo ratings yet
- TextDocument13 pagesTextsatyarth sharmaNo ratings yet
- Narrowband Passive Sonar TrackingDocument6 pagesNarrowband Passive Sonar TrackingBùi Trường Giang100% (1)
- FTIR InstrumentationDocument35 pagesFTIR InstrumentationNgurah MahasviraNo ratings yet
- Ut AscanDocument7 pagesUt AscanEngr Arfan Ali DhamrahoNo ratings yet
- BEWK Notes Sem5Document80 pagesBEWK Notes Sem5Midhul Mineesh100% (1)
- MODULE 8 - Hydroacoustic Position Reference (HPR)Document28 pagesMODULE 8 - Hydroacoustic Position Reference (HPR)gavin.vedder1980No ratings yet
- Sensors Used in Navigation: - Dead ReckoningDocument16 pagesSensors Used in Navigation: - Dead ReckoningEnio DiazNo ratings yet
- SONAR - NavigationDocument25 pagesSONAR - NavigationKarlaColinaNo ratings yet
- Echo SounderDocument7 pagesEcho SounderAley Nabi Rizvi90% (10)
- Bridge EquipmentsDocument14 pagesBridge EquipmentsSandipanBiswas100% (1)
- Radar Technology: Assignment 1Document28 pagesRadar Technology: Assignment 1Shami DavesharNo ratings yet
- We Already DiscussedDocument71 pagesWe Already Discussedvyshnavi nallaNo ratings yet
- A 4D Ready Marine Vibrator: Shearwater Havakustik LTDDocument5 pagesA 4D Ready Marine Vibrator: Shearwater Havakustik LTDrenatogeo14No ratings yet
- What Is The Principle of Ultrasonic Level Measurement?Document5 pagesWhat Is The Principle of Ultrasonic Level Measurement?Hamed RazaNo ratings yet
- 7-IGPE Brief Information For Use NMR in GeophysicsDocument3 pages7-IGPE Brief Information For Use NMR in Geophysicsmichel louis friedmanNo ratings yet
- Ac RecDocument47 pagesAc RecHimanshu ChoudharyNo ratings yet
- Ultasonic Wave ApplicationDocument38 pagesUltasonic Wave ApplicationVarah ORlandosNo ratings yet
- Kuliah Infra MerahDocument110 pagesKuliah Infra Merahmuhlisun azimNo ratings yet
- L-3 Ocean Systems Helras Ds-100Document2 pagesL-3 Ocean Systems Helras Ds-100Shiva SinghNo ratings yet
- Helras Ds-100: Helicopter Long-Range Active SonarDocument2 pagesHelras Ds-100: Helicopter Long-Range Active Sonar安洋No ratings yet
- RadarDocument10 pagesRadarNiranjan ReddyNo ratings yet
- Using Ultrasonic Sonar Rangers: Some Practical Problems and How To Overcome ThemDocument1 pageUsing Ultrasonic Sonar Rangers: Some Practical Problems and How To Overcome ThemAkram LaliwalaNo ratings yet
- Whitepaper NIR Spectrometer Technology Comparison PDFDocument14 pagesWhitepaper NIR Spectrometer Technology Comparison PDFMostafa Medhat Mostafa HassanNo ratings yet
- How To Use A Spectrum AnalyzerDocument3 pagesHow To Use A Spectrum Analyzer0limperoNo ratings yet
- How Marine Radar WorksDocument65 pagesHow Marine Radar WorksRohit Kakade100% (3)
- Basic DopplerDocument54 pagesBasic Dopplerprasoon100% (1)
- Time Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsFrom EverandTime Lapse Approach to Monitoring Oil, Gas, and CO2 Storage by Seismic MethodsNo ratings yet
- DNV 2-7-1Document60 pagesDNV 2-7-1Apostolie Iulian100% (1)
- SymbolsDocument1 pageSymbolskwakwa4No ratings yet
- Vibration, Dynamics and NoiseDocument6 pagesVibration, Dynamics and NoiseMauricio R MoralesNo ratings yet
- BPS91 08Document38 pagesBPS91 08kwakwa4No ratings yet
- Vibration, Dynamics and NoiseDocument6 pagesVibration, Dynamics and NoiseMauricio R MoralesNo ratings yet
- SymbolsDocument1 pageSymbolskwakwa4No ratings yet
- ETAP Electrical StrategyDocument5 pagesETAP Electrical Strategykwakwa4No ratings yet
- MPS Day1 World Class Reliability PerformanceDocument142 pagesMPS Day1 World Class Reliability Performancemelator100% (1)
- Veridian iDAC - Data Acquisition DeviceDocument2 pagesVeridian iDAC - Data Acquisition Devicekwakwa4No ratings yet
- Article - Multi-Channel Vibration Measurements - CTSS PDFDocument3 pagesArticle - Multi-Channel Vibration Measurements - CTSS PDFkwakwa4No ratings yet
- Risk Check Sheet: Vibration, Fatigue, Reliability and NoiseDocument3 pagesRisk Check Sheet: Vibration, Fatigue, Reliability and NoiseMauricio R MoralesNo ratings yet
- Sulzer Vertical Pump TroubleshootingDocument20 pagesSulzer Vertical Pump TroubleshootingNguyễn Thanh SơnNo ratings yet
- Article - Multi-Channel Vibration Measurements - CTSS PDFDocument3 pagesArticle - Multi-Channel Vibration Measurements - CTSS PDFkwakwa4No ratings yet
- HvacDocument376 pagesHvacJERIN JOHNSON100% (1)
- EENG 223 Final Exam S08-09 SolnDocument7 pagesEENG 223 Final Exam S08-09 Solnkwakwa4No ratings yet
- Psrs550 en Om c1Document142 pagesPsrs550 en Om c1Andrei Ieremciuc100% (1)
- CAP437Document164 pagesCAP437universidaddistritalNo ratings yet
- WHO - Indoor Air PollutionDocument484 pagesWHO - Indoor Air PollutionCosmo Deus100% (2)
- ကုရ္အာန္ဘာသာျပန္Document1,130 pagesကုရ္အာန္ဘာသာျပန္Aung Kyaw MoeNo ratings yet
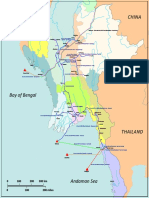
- Pipeline Map 20140402 - HJS - Cropped (Units in KM)Document1 pagePipeline Map 20140402 - HJS - Cropped (Units in KM)kwakwa4No ratings yet
- Thu Kyon Ma Khan B PDFDocument173 pagesThu Kyon Ma Khan B PDFkwakwa4No ratings yet
- What Is Acceptable Oil Consumption in Diesel EnginesDocument1 pageWhat Is Acceptable Oil Consumption in Diesel Engineskwakwa4No ratings yet
- TOEIC 870 QuestionsDocument6 pagesTOEIC 870 Questionskwakwa4No ratings yet
- MPS Day1 World Class Reliability PerformanceDocument142 pagesMPS Day1 World Class Reliability Performancemelator100% (1)
- DNV 2-7-1Document60 pagesDNV 2-7-1Apostolie Iulian100% (1)
- RCA Mini Guide PDFDocument15 pagesRCA Mini Guide PDFIldzamar Haifa WardhaniNo ratings yet
- Check Your English Vocabulary For TOEICDocument81 pagesCheck Your English Vocabulary For TOEICRobby100% (27)
- Operations and Maintenance GuideDocument321 pagesOperations and Maintenance GuideNatrajiNo ratings yet
- GAVDOSDocument31 pagesGAVDOSEleni BeeNo ratings yet
- ReportDocument40 pagesReportNihar NanyamNo ratings yet
- Sound Underwater Images PDFDocument189 pagesSound Underwater Images PDFNanangHadiPurbowoNo ratings yet
- Saab Kockums-A26 Brochure A4 Final Aw ScreenDocument16 pagesSaab Kockums-A26 Brochure A4 Final Aw ScreenVictor Pileggi100% (2)
- Self NoiseDocument7 pagesSelf NoiseGirish BellurNo ratings yet
- Ultrasonic Continuous Sludge Blanket Monitor: Installation, Operation & Maintenance ManualDocument60 pagesUltrasonic Continuous Sludge Blanket Monitor: Installation, Operation & Maintenance ManualTomasz ZającNo ratings yet
- Underwater Communication Systems: A Review: DX DXDocument5 pagesUnderwater Communication Systems: A Review: DX DXAnum AhmedNo ratings yet
- Garmin PDFDocument124 pagesGarmin PDFNANDA FIKRIY CHANNELNo ratings yet
- Subs On YachtsDocument18 pagesSubs On YachtsAna BrajkovicNo ratings yet
- Seafloor MorphologyDocument7 pagesSeafloor MorphologyWanda Rozentryt100% (1)
- Huce Manual (Ebook)Document153 pagesHuce Manual (Ebook)runsamok100% (1)
- Atauz PhD2004Document460 pagesAtauz PhD2004Burak Arslan0% (1)
- SoundDocument16 pagesSoundSagar RajNo ratings yet
- Blank Harpoon FormsDocument11 pagesBlank Harpoon FormsnasamomdeleNo ratings yet
- Sample DataDocument10 pagesSample DatatutikaNo ratings yet
- Robotics and Autonomous Systems: Amit Shukla Hamad KarkiDocument17 pagesRobotics and Autonomous Systems: Amit Shukla Hamad KarkifebriherupurnomoNo ratings yet
- 8 Dipmeter&Borehole Imaging ToolsDocument33 pages8 Dipmeter&Borehole Imaging Toolsام فاطمة البطاطNo ratings yet
- Graham Lester - The Collaborative Development of Remus and Hugin AUV CapabilityDocument37 pagesGraham Lester - The Collaborative Development of Remus and Hugin AUV Capabilitylapost_ferNo ratings yet
- Aquamap® 10X2 & 12X2 Series Specifications: DimensionsDocument4 pagesAquamap® 10X2 & 12X2 Series Specifications: DimensionsNesil AbieraNo ratings yet
- S-5B-Ed1 0 0Document24 pagesS-5B-Ed1 0 0Ahmad AfandiNo ratings yet
- LynxDocument9 pagesLynxSunshine PowerNo ratings yet
- Technology Lesson RevDocument5 pagesTechnology Lesson RevdidikhartadiNo ratings yet
- Gavia AUV 6 Page Brochure 2019Document6 pagesGavia AUV 6 Page Brochure 2019Thomas Thomas0% (1)
- Remus 600 Autonomous Underwater VehicleDocument5 pagesRemus 600 Autonomous Underwater Vehicleabdul azizNo ratings yet
- Acoustic PDFDocument42 pagesAcoustic PDFBùi Trường GiangNo ratings yet
- Expression of Interest (EOI) For Design of Anti Submarine Warfare ShallowDocument5 pagesExpression of Interest (EOI) For Design of Anti Submarine Warfare Shallowrajeev srivatsavNo ratings yet
- Sonar (SRF08)Document8 pagesSonar (SRF08)Ruben MagalhãesNo ratings yet
- HYPACK Max CompleteDocument9 pagesHYPACK Max CompleteRestoux LudovicNo ratings yet
- Underwater 3D Reconstruction Using BlueView Imaging SonarDocument7 pagesUnderwater 3D Reconstruction Using BlueView Imaging SonarGuilherme OliveiraNo ratings yet
- Underwater Objects Detection System Choice For HaDocument13 pagesUnderwater Objects Detection System Choice For HaTrầnHữuHòaNo ratings yet