You might also like
- Reaper Notation Editor Intro GuideDocument9 pagesReaper Notation Editor Intro GuideMat TorresNo ratings yet
- Batch Controller Manual: Load, Monitor and TroubleshootDocument35 pagesBatch Controller Manual: Load, Monitor and TroubleshootAhmad Arif SaktiNo ratings yet
- Nova Ev3200 ManualDocument25 pagesNova Ev3200 ManualCarolina Sansón100% (1)
- Op D4d2ar&op D4b1aDocument3 pagesOp D4d2ar&op D4b1aMed Iliane YahiaNo ratings yet
- BCX Hardware Manual Technical Features and DimensionsDocument8 pagesBCX Hardware Manual Technical Features and Dimensionsben ammar MohamedNo ratings yet
- Pipecheck User Manual enDocument625 pagesPipecheck User Manual enAlexNo ratings yet
- KM-10 User Guide.V111.enDocument18 pagesKM-10 User Guide.V111.enSalah SalahNo ratings yet
- KM-30S User Manual.V122.enDocument16 pagesKM-30S User Manual.V122.enfarzin100% (2)
- User Manual: Elevator Door ControllerDocument20 pagesUser Manual: Elevator Door ControllerHabboula Mourad100% (1)
- NICE1000 Elevator Controller Setup ManualDocument51 pagesNICE1000 Elevator Controller Setup ManualHabibulla BavajiNo ratings yet
- User Guide NICE900 Series Integrated Door Operator ControllerDocument99 pagesUser Guide NICE900 Series Integrated Door Operator ControllerCoil98No ratings yet
- Plano Mikrolift Ml50sDocument61 pagesPlano Mikrolift Ml50sJavier MartínezNo ratings yet
- CX/ELF Series Lift Control System: User ManualDocument26 pagesCX/ELF Series Lift Control System: User ManualMohamed Saad100% (2)
- CX User ManuelDocument26 pagesCX User ManuelSafi100% (3)
- Arcode Geared Sp-16 Cpc-T.enDocument38 pagesArcode Geared Sp-16 Cpc-T.enAbdallh YassenNo ratings yet
- ML40P Kullanim KilavuzuDocument23 pagesML40P Kullanim KilavuzumuaadhNo ratings yet
- Ac Series AybeyDocument76 pagesAc Series AybeyMohamed SaadNo ratings yet
- ML50S Program v1 04x ENG-2yprkDocument5 pagesML50S Program v1 04x ENG-2yprkAissaoui Mohamed SamirNo ratings yet
- Display TFT Marlin - EvoDocument8 pagesDisplay TFT Marlin - EvoVICTOR JOSE CHAVEZ PALMANo ratings yet
- Rescue V Rescue V1.4 1.4: User'S ManualDocument36 pagesRescue V Rescue V1.4 1.4: User'S Manualbouabdallah badisNo ratings yet
- ML 20 EsDocument8 pagesML 20 EsMohamed Karakache50% (2)
- Door Dive: User ManualDocument67 pagesDoor Dive: User ManualRoyal AkashNo ratings yet
- HEX Serisi Asansör Kumanda Sistemi: Kullanim KilavuzuDocument34 pagesHEX Serisi Asansör Kumanda Sistemi: Kullanim KilavuzuerkanNo ratings yet
- Elevator Control Card: User ManualDocument26 pagesElevator Control Card: User ManualГариб Мед100% (1)
- ARCODE PLC Module Guide: Program Logic Controller Module FunctionsDocument4 pagesARCODE PLC Module Guide: Program Logic Controller Module FunctionsBrahim CherguiNo ratings yet
- Bg101 User Manual1Document22 pagesBg101 User Manual1MikeNo ratings yet
- BR200 V1.2Document76 pagesBR200 V1.2Hasan Hasan100% (1)
- Arcode Quick Installation Guide.V210.EnDocument27 pagesArcode Quick Installation Guide.V210.EnFidan LatifiNo ratings yet
- Steel W Orks Products (Thailand) : Elevator Controller SystemDocument4 pagesSteel W Orks Products (Thailand) : Elevator Controller Systemtran xobonNo ratings yet
- A2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDDocument85 pagesA2000 Door Operator Controller: QMA (Shanghai) Electric Co., LTDJesús David Diaz MontesNo ratings yet
- Technical Dossier Replacement of The Reveco I Electronics Box With The Reveco PrimaDocument8 pagesTechnical Dossier Replacement of The Reveco I Electronics Box With The Reveco Primatuner12100% (1)
- Microzed-A V Microzed-A V3.1 3.1: User'S ManualDocument38 pagesMicrozed-A V Microzed-A V3.1 3.1: User'S ManualWassim Baccari100% (2)
- Arcube Open-Loop Slip Compensation - enDocument1 pageArcube Open-Loop Slip Compensation - enTushar ImranNo ratings yet
- HB As380 E20 PDFDocument70 pagesHB As380 E20 PDFjonathanNo ratings yet
- Arcode Pit Entry Reset Procedure.V110.enDocument3 pagesArcode Pit Entry Reset Procedure.V110.enAhmedNo ratings yet
- Mikronik SX Opman V2.00 EngDocument69 pagesMikronik SX Opman V2.00 EngKhaled ZakariaNo ratings yet
- User Manual: Ax Series Lift Control SystemDocument15 pagesUser Manual: Ax Series Lift Control SystemMohd Abu Ajaj100% (1)
- MicroZed v35 CatalogDocument32 pagesMicroZed v35 CataloghabibullaNo ratings yet
- Invt Chv18000 InverterDocument154 pagesInvt Chv18000 InverterAbel CregoNo ratings yet
- MonarchDocument126 pagesMonarchJorge Perez GuerraNo ratings yet
- Konel Evo Pro +a3 CeDocument1 pageKonel Evo Pro +a3 CeSENER AKSOYNo ratings yet
- Technical Manual and Electronical Regulation Vvvf-4: Cabin DoorsDocument7 pagesTechnical Manual and Electronical Regulation Vvvf-4: Cabin DoorsMaicol Rodolfo CaizaNo ratings yet
- Button Function and Parameter Settings for Door ControllerDocument24 pagesButton Function and Parameter Settings for Door ControllerBâlâ BøbbyNo ratings yet
- Liftsense User Manual.V135.enDocument6 pagesLiftsense User Manual.V135.enEdhem SmailbegovićNo ratings yet
- Flex 2: Electric Screw Driven Platform LiftDocument24 pagesFlex 2: Electric Screw Driven Platform LiftCatur Putra SuadnyanaNo ratings yet
- AS380 Series Elevator Intergrated Controller User Instruction V2.13 PDFDocument296 pagesAS380 Series Elevator Intergrated Controller User Instruction V2.13 PDFRogério da Silva de OliveiraNo ratings yet
- Monarch Mctcpece1Document48 pagesMonarch Mctcpece1Sazzad Hossan RaselNo ratings yet
- PU3200 English ManualDocument71 pagesPU3200 English Manualعلاء صقرNo ratings yet
- Elevator Control Module: User'SDocument9 pagesElevator Control Module: User'SjhfbtyNo ratings yet
- Installation Manual for Inverter Gefran VDL200 on MoviLiftDocument7 pagesInstallation Manual for Inverter Gefran VDL200 on MoviLiftSamih AlraghbanNo ratings yet
- Voice Synthesizer Snv200 Eng Rev.0Document8 pagesVoice Synthesizer Snv200 Eng Rev.0Elevator & Escalator EngineeringNo ratings yet
- Nice 3000Document98 pagesNice 3000NAIMUR RAHAMANNo ratings yet
- FX-CAN Hardware Manual.V111.EnDocument5 pagesFX-CAN Hardware Manual.V111.EnAli DiabNo ratings yet
- iAstar Integrated Control System Code ListDocument75 pagesiAstar Integrated Control System Code ListSamih AlraghbanNo ratings yet
- WB Installation Manual EL ENG 4.3Document121 pagesWB Installation Manual EL ENG 4.3dianelys Sivada100% (1)
- Machine Brakes Self-Monitoring Test Instructions V10.EnDocument5 pagesMachine Brakes Self-Monitoring Test Instructions V10.EnKs BharathiyarNo ratings yet
- FC 3000s PDFDocument60 pagesFC 3000s PDFAgnelo FernandesNo ratings yet
- Catalogue en - Lift Control Systems 01 - 2010Document23 pagesCatalogue en - Lift Control Systems 01 - 2010Anoop KumarNo ratings yet
- COP User Manual 2.0 PDFDocument5 pagesCOP User Manual 2.0 PDFخالدعبدالله100% (1)
- HDEKO10KullanımKlavuzuENG-CDocument20 pagesHDEKO10KullanımKlavuzuENG-CSoufiane MounazNo ratings yet
- Manual Agy-Ev GBDocument214 pagesManual Agy-Ev GBstankovukanovicNo ratings yet
- iAstar-AS320 Manual V2.02Document166 pagesiAstar-AS320 Manual V2.02A. PrazNo ratings yet
- User Manual: Elevator Door ControllerDocument18 pagesUser Manual: Elevator Door Controllerzaki zakiNo ratings yet
- KBK-10 - V101 Dimensional Drawing - enDocument1 pageKBK-10 - V101 Dimensional Drawing - enmicrocherietNo ratings yet
- ARCODE MRL Gearless (EN81-20) .EnDocument46 pagesARCODE MRL Gearless (EN81-20) .EnmicrocherietNo ratings yet
- Secure your facility with RFID access controlDocument6 pagesSecure your facility with RFID access controlSAMNo ratings yet
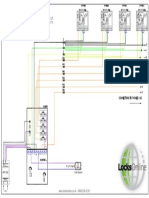
- LocksOnline Videx 8K Intercom WiringDocument1 pageLocksOnline Videx 8K Intercom WiringmicrocherietNo ratings yet
- Automatic Sliding Lift Door Assembly ManualDocument16 pagesAutomatic Sliding Lift Door Assembly ManualmicrocherietNo ratings yet
- 03 G 5 Pwskap 110Document4 pages03 G 5 Pwskap 110microcherietNo ratings yet
- Arcode Hardware Manual.V211.EnDocument12 pagesArcode Hardware Manual.V211.Enmicrocheriet100% (1)
- Commodity Owner Manual 2017Document269 pagesCommodity Owner Manual 2017Rene Amrhyn100% (3)
- Arem Mobile User Manual.V101.enDocument8 pagesArem Mobile User Manual.V101.enmicrocherietNo ratings yet
- AREM Hardware Manual.V110.EnDocument3 pagesAREM Hardware Manual.V110.Enmicrocheriet100% (1)
- CPC Hardware Manual.V110.EnDocument7 pagesCPC Hardware Manual.V110.EnmicrocherietNo ratings yet
- 11.5.10 Flow ManufacturingDocument362 pages11.5.10 Flow ManufacturingvinodkundyannaNo ratings yet
- Advprint UserefDocument106 pagesAdvprint UserefKamil BarańskiNo ratings yet
- EPBCS TrainingDocument36 pagesEPBCS TrainingRoubinkumar SivaNo ratings yet
- Installation and maintenance manual for GAHP reversible heat pumpsDocument74 pagesInstallation and maintenance manual for GAHP reversible heat pumpsMurat BaburNo ratings yet
- Probability PlotsDocument13 pagesProbability Plotssebas_semiNo ratings yet
- Composite Application Library in WPF Application - CodeProjectDocument9 pagesComposite Application Library in WPF Application - CodeProjectAnonymous m8s2TWNo ratings yet
- 03 - LT Ib enDocument42 pages03 - LT Ib enjmmNo ratings yet
- SYMPHONY SERIES STRING ENSEMBLE Manual PDFDocument90 pagesSYMPHONY SERIES STRING ENSEMBLE Manual PDFsuriyaprakashNo ratings yet
- Led TV : Owner'S ManualDocument52 pagesLed TV : Owner'S ManualSneyder MartinezNo ratings yet
- Sound Pack Installation Instructions ENG 210602Document14 pagesSound Pack Installation Instructions ENG 210602Anton PoluboyarinovNo ratings yet
- Appian StepbyStep 10 (Interfaces 102)Document19 pagesAppian StepbyStep 10 (Interfaces 102)Guttula ChaitanyaNo ratings yet
- Intelligent universal air circuit breaker operation manual overviewDocument15 pagesIntelligent universal air circuit breaker operation manual overviewJoseNo ratings yet
- Web-based Energy Accounting System User ManualDocument14 pagesWeb-based Energy Accounting System User ManualvenkeypalakuriNo ratings yet
- FAR-22x8series ENDocument8 pagesFAR-22x8series ENRanit RanitNo ratings yet
- AJ-200 Manual EnglishDocument17 pagesAJ-200 Manual Englishqasimjamal123No ratings yet
- Amadeus5 User ManualDocument125 pagesAmadeus5 User Manuali571814No ratings yet
- Terratrip 101 Manual English PDFDocument5 pagesTerratrip 101 Manual English PDFSunnyDreNo ratings yet
- Kd674 ManualDocument426 pagesKd674 ManualRichard RosalesNo ratings yet
- CA13 User ManualDocument17 pagesCA13 User ManualNicoFlamelNo ratings yet
- Ferid Allani - Landmark JudgementDocument38 pagesFerid Allani - Landmark JudgementmayurNo ratings yet
- 1.MM01-Material MasterDocument21 pages1.MM01-Material Mastersubramanyam orugantiNo ratings yet
- Ignite User GuideDocument148 pagesIgnite User GuideTester QuesterNo ratings yet
- Lesson 1 - Autocad User Interface OcrDocument10 pagesLesson 1 - Autocad User Interface Ocrapi-241156742No ratings yet
- Integration With Network Management Systems: Snmpset .1.3.6.1.4.1.3854.1.2.2.1.60.0 IDocument23 pagesIntegration With Network Management Systems: Snmpset .1.3.6.1.4.1.3854.1.2.2.1.60.0 ILuis VeraNo ratings yet
- Mix W ManualDocument169 pagesMix W ManualAdrian KorolNo ratings yet
- Philips 24pfl1335 98Document67 pagesPhilips 24pfl1335 98Hoson AkNo ratings yet
- EXCEL CHARTSDocument76 pagesEXCEL CHARTStanveer abbasNo ratings yet