You might also like
- Automotive Electronic Diagnostics (Course 2)From EverandAutomotive Electronic Diagnostics (Course 2)Rating: 4 out of 5 stars4/5 (2)
- SAE Metric Users GuideDocument39 pagesSAE Metric Users GuidehaharameshNo ratings yet
- Mechatronics Notes PDFDocument188 pagesMechatronics Notes PDFharish100% (1)
- MechatronicsDocument32 pagesMechatronicskr_abhijeet72356587No ratings yet
- Engineering Mechanics D S Kumar PDFDocument1 pageEngineering Mechanics D S Kumar PDFabhishek bhardwaj0% (4)
- Elements of Mechatronics: V. ThulasikanthDocument46 pagesElements of Mechatronics: V. ThulasikanthNeela MuraliNo ratings yet
- Unit 3 MST 124Document121 pagesUnit 3 MST 124Ver Clau100% (1)
- CS 4407 Data Mining and Machine Learning - Term 3, 2018-2019Document11 pagesCS 4407 Data Mining and Machine Learning - Term 3, 2018-2019studyjunkyNo ratings yet
- Summer Training Report On Embedded System (Atishay Kumar)Document48 pagesSummer Training Report On Embedded System (Atishay Kumar)Atishay Kumar100% (3)
- Mems PDFDocument53 pagesMems PDFM.ThirunavukkarasuNo ratings yet
- Quantum Computing For Finance State-of-the-Art andDocument24 pagesQuantum Computing For Finance State-of-the-Art andalexander benNo ratings yet
- Lecture 1 General Introduction To MechatronicsDocument108 pagesLecture 1 General Introduction To MechatronicsKrit JiamjirochNo ratings yet
- Intro To MechatronicsDocument30 pagesIntro To MechatronicsUrvashi ParmarNo ratings yet
- Lecture 1-General Introduction To MechatronicsDocument108 pagesLecture 1-General Introduction To MechatronicsMASOUDNo ratings yet
- Solar Power Tracking System Boost Converter Design With MPPT Controller - PagenumberDocument10 pagesSolar Power Tracking System Boost Converter Design With MPPT Controller - Pagenumberoke temitope oluwasanmiNo ratings yet
- 18 Me 744Document189 pages18 Me 744Mi MiNo ratings yet
- Mechatronics 18 NovDocument10 pagesMechatronics 18 NovEsnayder teorias dragon ballNo ratings yet
- (PDF) Assignment 1 - Introduction To MechatronicsDocument4 pages(PDF) Assignment 1 - Introduction To MechatronicskyeligoyoNo ratings yet
- Mechatronics IntroductionDocument15 pagesMechatronics IntroductionAjit PatilNo ratings yet
- ME442 Chapter1Document13 pagesME442 Chapter1AlanNo ratings yet
- MechatronicsDocument112 pagesMechatronicsshivaramakrishna8790No ratings yet
- Unit 5 MachetronicsDocument84 pagesUnit 5 MachetronicsRaj ChNo ratings yet
- CNC RoboticsDocument17 pagesCNC RoboticsKunal DuttNo ratings yet
- My Synopsis Mini ProjectDocument9 pagesMy Synopsis Mini Projectamankumar1409201No ratings yet
- My Synopsis Mini Project AmanDocument9 pagesMy Synopsis Mini Project Amanamankumar1409201No ratings yet
- Sistemas MectronicosDocument27 pagesSistemas MectronicosWilmer Alfredo CondeNo ratings yet
- Mod1 Mechatronics and Manufacturing Automation PDFDocument17 pagesMod1 Mechatronics and Manufacturing Automation PDFthebetterman0511No ratings yet
- RIME-221 Introduction To Mechatronics Design Fundamentals: Lec. Tayyab ShahidDocument16 pagesRIME-221 Introduction To Mechatronics Design Fundamentals: Lec. Tayyab ShahidMuhammad Abdullah YounasNo ratings yet
- Haris Yaqoob MEMS ReportDocument27 pagesHaris Yaqoob MEMS Reportk shahNo ratings yet
- Multiplexed Model Predictive Control K.V. Ling, J.M. Maciejowski, A.G. Richards, and B-F. WuDocument31 pagesMultiplexed Model Predictive Control K.V. Ling, J.M. Maciejowski, A.G. Richards, and B-F. WuLuís FelipeNo ratings yet
- Unit 57: Mechatronic System: Outcome 1 Tutorial 1 - Mechatronic Systems and ProductsDocument7 pagesUnit 57: Mechatronic System: Outcome 1 Tutorial 1 - Mechatronic Systems and ProductsMohamed AbousenaNo ratings yet
- Mechatronic Systems: Concepts and Applications: R. IsermannDocument27 pagesMechatronic Systems: Concepts and Applications: R. Isermannmauricio187No ratings yet
- Sensorless Direct Torque Control Based On Nonlinear Integral Sliding Mode Controllers For An Induction Motor Drive: Experimental VerificationDocument20 pagesSensorless Direct Torque Control Based On Nonlinear Integral Sliding Mode Controllers For An Induction Motor Drive: Experimental VerificationMuhammad UmarNo ratings yet
- Study of Substation Automation System Using IEC61850 ProtocolDocument7 pagesStudy of Substation Automation System Using IEC61850 ProtocolSatay ChillyNo ratings yet
- Mechatronic Systems-Innovative Products With Embedded ControlDocument16 pagesMechatronic Systems-Innovative Products With Embedded ControlJEFF PUPIALESSNo ratings yet
- Cired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221Document4 pagesCired: 21 International Conference On Electricity Distribution Frankfurt, 6-9 June 2011 Paper 0221kotiniNo ratings yet
- CDM ME 407 Mechatronics - 2021Document15 pagesCDM ME 407 Mechatronics - 2021Tony K PaulNo ratings yet
- NudgeDocument7 pagesNudgeSHUBHAM JIBHAKATENo ratings yet
- Microprocessor Based: Control Systems: A First Step in Teaching MechatronicsDocument5 pagesMicroprocessor Based: Control Systems: A First Step in Teaching MechatronicsGauravNo ratings yet
- Notes MechaDocument41 pagesNotes MechaashNo ratings yet
- Various Control Methods of Permanent Magnet Synchronous Motor Drives in Electric Vehicle: A Technical ReviewDocument5 pagesVarious Control Methods of Permanent Magnet Synchronous Motor Drives in Electric Vehicle: A Technical ReviewTELKOMNIKANo ratings yet
- Mechatronics and Manufacturing Automation: NPTEL Phase 2Document17 pagesMechatronics and Manufacturing Automation: NPTEL Phase 2Prateek PandeyNo ratings yet
- Modulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost FunctionDocument10 pagesModulated Model Predictive Speed Controller For PMSM Drives Employing Voltage Based Cost FunctionGlobal PapersNo ratings yet
- SEC Mechatronics Lab Manual R2013 Shan PDFDocument93 pagesSEC Mechatronics Lab Manual R2013 Shan PDFMonish KumarNo ratings yet
- Fa17 Bme 057Document8 pagesFa17 Bme 057tayyub qayyumNo ratings yet
- Elements of Mechatronics: V. ThulasikanthDocument46 pagesElements of Mechatronics: V. ThulasikanthPrashanth JagadeeshNo ratings yet
- Unit 1mechatronics - ECE G1Document115 pagesUnit 1mechatronics - ECE G1ishaanmittalcollegeNo ratings yet
- 259 - Lecturer NotvfvvervrevDocument81 pages259 - Lecturer NotvfvvervrevBijay KumarNo ratings yet
- Design and Implementation of Real Time Transformer Health Monitoring System Using GSM TechnologyDocument5 pagesDesign and Implementation of Real Time Transformer Health Monitoring System Using GSM Technologyrocky bhaiNo ratings yet
- Introduction To Mechatronics: By: Bruck AlemuDocument44 pagesIntroduction To Mechatronics: By: Bruck AlemumathewosNo ratings yet
- Unit-5 MechatronicsDocument34 pagesUnit-5 Mechatronicsrudrav3210No ratings yet
- 6565 Ijmme Ijens PDFDocument17 pages6565 Ijmme Ijens PDFعلي كامل الاسديNo ratings yet
- Fuzzy 1Document7 pagesFuzzy 1Nokhwrang BrahmaNo ratings yet
- Chatterjee2021 - Scientometric Review of Artificial Intelligence For OperationsDocument31 pagesChatterjee2021 - Scientometric Review of Artificial Intelligence For Operations蔡杰No ratings yet
- Internship 3Document38 pagesInternship 3S K B COMPUTERSNo ratings yet
- Servo Motor Driver Design For High Performance Applications: "' - (L L) I - L IDocument6 pagesServo Motor Driver Design For High Performance Applications: "' - (L L) I - L ISHADES 4 ALLNo ratings yet
- Mechatronics 2 UnitDocument24 pagesMechatronics 2 UnitMukesh sutharNo ratings yet
- Fmem - Unit VDocument57 pagesFmem - Unit VBodhi SealNo ratings yet
- A Seminar Report ON "Mems Technology"Document32 pagesA Seminar Report ON "Mems Technology"nikhil jhaNo ratings yet
- DesktopENERGY METERING FINALDocument18 pagesDesktopENERGY METERING FINALvinayaksavant9119No ratings yet
- VSM Ieee MagazineDocument10 pagesVSM Ieee MagazineJuanNo ratings yet
- Islamic University of TechnologyDocument25 pagesIslamic University of TechnologyAzmain Rashid Raiyan 200011101No ratings yet
- Power TheftDocument71 pagesPower TheftmanikandanNo ratings yet
- Mtech Vacant Seats16633970383563Document1 pageMtech Vacant Seats16633970383563abhishek bhardwajNo ratings yet
- Disnd: SR - No. Sheet No. Roll No. Code: - Category MarksDocument17 pagesDisnd: SR - No. Sheet No. Roll No. Code: - Category Marksabhishek bhardwajNo ratings yet
- Himachal Pradesh Staff Selection Commission Hamirpur Distt. HAMIRPUR (H.P.) - 177001Document29 pagesHimachal Pradesh Staff Selection Commission Hamirpur Distt. HAMIRPUR (H.P.) - 177001abhishek bhardwajNo ratings yet
- TIMETABLE ROUTES FROM HMRDocument4 pagesTIMETABLE ROUTES FROM HMRabhishek bhardwajNo ratings yet
- Syllabusdriver 29032022Document3 pagesSyllabusdriver 29032022abhishek bhardwajNo ratings yet
- Himachal Road Transport Corporation: Submitted in Partial Fulfillment of The Requirements For The Degree ofDocument43 pagesHimachal Road Transport Corporation: Submitted in Partial Fulfillment of The Requirements For The Degree ofabhishek bhardwajNo ratings yet
- Pedal Powered Hacksaw MachineDocument25 pagesPedal Powered Hacksaw Machineabhishek bhardwajNo ratings yet
- 18BT030216 Anshul Pedal-Power-Hacksaw EditDocument31 pages18BT030216 Anshul Pedal-Power-Hacksaw Editabhishek bhardwajNo ratings yet
- 18bt030210, Akshay Bangar Training ReportDocument44 pages18bt030210, Akshay Bangar Training Reportabhishek bhardwajNo ratings yet
- 18BT030203 - Abhishek (A&R Lab)Document23 pages18BT030203 - Abhishek (A&R Lab)abhishek bhardwajNo ratings yet
- 18bt030203 Abhishek Thermal Engg. LabDocument3 pages18bt030203 Abhishek Thermal Engg. Lababhishek bhardwajNo ratings yet
- Probability NotesDocument238 pagesProbability Notesabhishek bhardwajNo ratings yet
- Detailed Content Sem 3Document23 pagesDetailed Content Sem 3abhishek bhardwajNo ratings yet
- Stacks 2Document25 pagesStacks 2Sumit KumarNo ratings yet
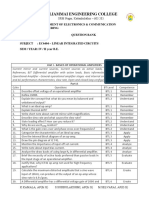
- EC6404-Linear Integrated CircuitsDocument9 pagesEC6404-Linear Integrated CircuitsmohanNo ratings yet
- TemperatureDocument26 pagesTemperatureTanya WhiteNo ratings yet
- CorrectionDocument24 pagesCorrectionDeepa RameshNo ratings yet
- Improved Optical Character Recognition With Deep Neural NetworkDocument5 pagesImproved Optical Character Recognition With Deep Neural NetworkharshithaysNo ratings yet
- Ukuran Asosiasi Dalam Epidemiologi: Putri Handayani, M. KKKDocument28 pagesUkuran Asosiasi Dalam Epidemiologi: Putri Handayani, M. KKKNHLNo ratings yet
- Calculus For Business Economics Life Sciences and Social Sciences 13th Edition Barnett Solutions ManualDocument34 pagesCalculus For Business Economics Life Sciences and Social Sciences 13th Edition Barnett Solutions Manualdanieltrangm8i100% (27)
- COUNTIF in Excel - Count If Not Blank, Greater Than, Duplicate or UniqueDocument3 pagesCOUNTIF in Excel - Count If Not Blank, Greater Than, Duplicate or UniquePEMAR ACOSTANo ratings yet
- Binomial Distribution WorksheetDocument39 pagesBinomial Distribution WorksheetSyed Ali ZafarNo ratings yet
- PDF Solutionsmanualforgraphtheorypdf DDDocument15 pagesPDF Solutionsmanualforgraphtheorypdf DDhp_blacklight74020% (1)
- QCQI Exercise Solutions (Chapter 3)Document2 pagesQCQI Exercise Solutions (Chapter 3)sooraj sNo ratings yet
- TN TRB Aeeo SyllabusDocument3 pagesTN TRB Aeeo SyllabusvijayenglishliteratureNo ratings yet
- Maths Project PDF FDocument18 pagesMaths Project PDF FLakshayNo ratings yet
- RF Fe LTB Manual en PDFDocument126 pagesRF Fe LTB Manual en PDFcristinelbNo ratings yet
- MgO VASP TutorialDocument16 pagesMgO VASP TutorialKartavya BholaNo ratings yet
- BPH-202 Waves & OpticsDocument2 pagesBPH-202 Waves & OpticsVijay KumarNo ratings yet
- All Exercises FKEE v2Document29 pagesAll Exercises FKEE v2Muhd Nur SalamNo ratings yet
- Comprehensive Method For Transient Modeling of Single Phase InductionDocument15 pagesComprehensive Method For Transient Modeling of Single Phase InductionvalentinmullerNo ratings yet
- OLE IFL Teacher Mate Study DataDocument30 pagesOLE IFL Teacher Mate Study Datainfo6206No ratings yet
- Memorization List: Ions-Names and ChargeDocument4 pagesMemorization List: Ions-Names and ChargepringlekNo ratings yet
- Major Class Work 2Document8 pagesMajor Class Work 2Aloysi DelouizaNo ratings yet
- Isi Mma Pca Csa 2021Document7 pagesIsi Mma Pca Csa 2021Abhay Raj SinghNo ratings yet
- AutoencoderDocument24 pagesAutoencoderAkash SavaliyaNo ratings yet
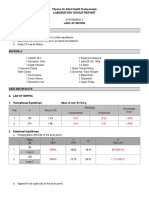
- Laboratory Group Report: Physics For Allied Health ProfessionalsDocument2 pagesLaboratory Group Report: Physics For Allied Health ProfessionalsJeremiah AmanteNo ratings yet
- BAerodynamics 1Document23 pagesBAerodynamics 1Charm YakuzaNo ratings yet
- Cse384 Compiler Design Laboratory Lab ManualDocument55 pagesCse384 Compiler Design Laboratory Lab ManualM_Computer50% (2)