You might also like
- Chapter 12Document59 pagesChapter 12api-3698788No ratings yet
- A Chapter4Document12 pagesA Chapter4ayadNo ratings yet
- FEM Part 3 (Chap-5,6,7)Document17 pagesFEM Part 3 (Chap-5,6,7)abrahamNo ratings yet
- Gantmacher's FormulaDocument7 pagesGantmacher's FormulaIJRASETPublicationsNo ratings yet
- Transelliptical Component Analysis: Johns Hopkins University Princeton UniversityDocument26 pagesTranselliptical Component Analysis: Johns Hopkins University Princeton UniversitybobmezzNo ratings yet
- 02 Strain and Stress-Strain RelationsDocument74 pages02 Strain and Stress-Strain Relationsvân NamNo ratings yet
- The Finite Element Method: Introduction To Mechanics For Solids and StructuresDocument55 pagesThe Finite Element Method: Introduction To Mechanics For Solids and StructuresgagagaNo ratings yet
- CE 412 Lecture 2 Material BehaviourDocument77 pagesCE 412 Lecture 2 Material BehaviourCivil Wallah Ahmed RabbiNo ratings yet
- Triple Integration Its Applications Integral CalculusDocument29 pagesTriple Integration Its Applications Integral Calculusshashi1990sawNo ratings yet
- Chapter 7 Two-Dimensional FormulationDocument18 pagesChapter 7 Two-Dimensional Formulationvivi100% (1)
- Chpt07-FEM For Plates & ShellsnewDocument32 pagesChpt07-FEM For Plates & Shellsnewernestnsabimana74No ratings yet
- L2 - Elastoplasticity Mohr-Coulomb in PlaxisDocument18 pagesL2 - Elastoplasticity Mohr-Coulomb in PlaxisOng Tai BoonNo ratings yet
- Slide Chpt02Document49 pagesSlide Chpt02yasinfanus149No ratings yet
- Plot Qnorm Plot NormalDocument11 pagesPlot Qnorm Plot NormalHaydarRPNo ratings yet
- Sim 3D TRANSFORMATIONS FinalDocument22 pagesSim 3D TRANSFORMATIONS FinalVaishakh SasikumarNo ratings yet
- Sheet Music - MoreThanWords Part 4Document1 pageSheet Music - MoreThanWords Part 4frankNo ratings yet
- CS 4731: Computer Graphics Lecture 8: 3D Affine Transforms: Emmanuel AguDocument28 pagesCS 4731: Computer Graphics Lecture 8: 3D Affine Transforms: Emmanuel AgumaheshNo ratings yet
- Calc16 7Document4 pagesCalc16 7Jeoff Libo-onNo ratings yet
- Chapter 5Document10 pagesChapter 5Young BrotherNo ratings yet
- Solutions Chapter 4Document9 pagesSolutions Chapter 4Jesus MoralNo ratings yet
- Finite Element Formulation: 2.1 Basic Equations of An Elastic ContinuaDocument26 pagesFinite Element Formulation: 2.1 Basic Equations of An Elastic ContinuaJai FrinzNo ratings yet
- Session 9 2018Document17 pagesSession 9 2018Mehroze ElahiNo ratings yet
- CSL7450 C10Document13 pagesCSL7450 C10Chirag (B19CSE026)No ratings yet
- Lec4 Forward KinematicsDocument21 pagesLec4 Forward KinematicsbalkyderNo ratings yet
- Physics 111: Mechanics: Dale GaryDocument25 pagesPhysics 111: Mechanics: Dale GaryGAMING椹STINGツNo ratings yet
- Theres Nothing Holdin Me Back PDFDocument4 pagesTheres Nothing Holdin Me Back PDForalb100% (1)
- Lecture 3 PDFDocument66 pagesLecture 3 PDFHà Anh Minh LêNo ratings yet
- VC.08: Transforming 3D Integrals Literacy: DZ Dy DXDocument6 pagesVC.08: Transforming 3D Integrals Literacy: DZ Dy DXSri RaghavanNo ratings yet
- 3 Maths MechanicsDocument92 pages3 Maths MechanicsIñigoAlberdiNo ratings yet
- Lecture 10 - Particles in 3D Box and Hydrogen AtomDocument28 pagesLecture 10 - Particles in 3D Box and Hydrogen AtomArc ZeroNo ratings yet
- MOM I - Module 26Document7 pagesMOM I - Module 26Muhammad HabibNo ratings yet
- Ross Don-3 HandsDocument13 pagesRoss Don-3 HandsLeyla PatriciaNo ratings yet
- Sober: Open Dsus4 1 D 2 A 6 DDocument12 pagesSober: Open Dsus4 1 D 2 A 6 DDavide LongariNo ratings yet
- Schedule: Week Date TopicDocument9 pagesSchedule: Week Date TopicmostafaNo ratings yet
- A Review of Edge-Based 3D Tracking of Rigid ObjectsDocument17 pagesA Review of Edge-Based 3D Tracking of Rigid ObjectsPawankumar GuravNo ratings yet
- 3D TransformationsDocument27 pages3D TransformationsljjbNo ratings yet
- MA211 Assignment 1 Cover PageDocument11 pagesMA211 Assignment 1 Cover PageNikasha DeviNo ratings yet
- UR5 Inverse KinematicsDocument8 pagesUR5 Inverse KinematicsLuis Gerardo CarvajalNo ratings yet
- SYS Training Manual: 2D & 3D Solid AnalysisDocument43 pagesSYS Training Manual: 2D & 3D Solid AnalysisMinh TranNo ratings yet
- Building Convolutional Neural Networks For Image Classification SlidesDocument57 pagesBuilding Convolutional Neural Networks For Image Classification SlidesRahul ShettyNo ratings yet
- Chapter 6Document38 pagesChapter 6NEBIYU AYDAGNUHIM TADESSENo ratings yet
- AEM-Chapter01 (PD Orde 1)Document57 pagesAEM-Chapter01 (PD Orde 1)Achmad FauziNo ratings yet
- Levy-Mises EMEDocument3 pagesLevy-Mises EMELeonardo Kyo KabayamaNo ratings yet
- Promise: Capo Fret 2 Fmaj7 Em7 em ( 7) /D C/D Am7/DDocument1 pagePromise: Capo Fret 2 Fmaj7 Em7 em ( 7) /D C/D Am7/DJoys ShumNo ratings yet
- Gamma & Beta FunctionDocument2 pagesGamma & Beta FunctionAbid PromitNo ratings yet
- Walk Don't Run-2partDocument2 pagesWalk Don't Run-2partjiyoung kimNo ratings yet
- Night Flight by Sungha JungDocument8 pagesNight Flight by Sungha JungEros SandrlNo ratings yet
- Ascending Bass: Combining TechniquesDocument3 pagesAscending Bass: Combining TechniquesYuZe LeeNo ratings yet
- Perhitungan Teori GDocument7 pagesPerhitungan Teori GSyamsir SainuddinNo ratings yet
- Extreme-Cupids DeadDocument16 pagesExtreme-Cupids DeadMauro LondrilloNo ratings yet
- 1 - Linear RegressionDocument28 pages1 - Linear RegressionEmdad HossainNo ratings yet
- 1 Logit - Gam: Generalized Additive Model For Di-Chotomous Dependent VariablesDocument28 pages1 Logit - Gam: Generalized Additive Model For Di-Chotomous Dependent VariablesarifNo ratings yet
- Uji Ambang Rangsangan - ManisDocument1 pageUji Ambang Rangsangan - ManiswahyuNo ratings yet
- TF IdfDocument10 pagesTF IdfAaa AaNo ratings yet
- I. S Ă Se Calculeze:: Recapitulare Sem I Clasa A12-A ADocument6 pagesI. S Ă Se Calculeze:: Recapitulare Sem I Clasa A12-A Amatei volanschiNo ratings yet
- Computer Numerical Control: TransformationsDocument56 pagesComputer Numerical Control: TransformationsibraheemNo ratings yet
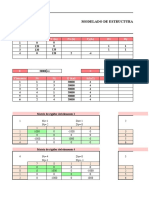
- Modelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyDocument19 pagesModelado de Estructura: Nodo X (In) Y (In) FX (K) Fy (K) RX RyEdgar AlfonsoNo ratings yet
- Finite Element Method For Structural Dynamic and Stability AnalysesDocument52 pagesFinite Element Method For Structural Dynamic and Stability AnalysesabimalainNo ratings yet
- CVG 4184 - 6305 - Ch5 - Strength and Deformation PDFDocument47 pagesCVG 4184 - 6305 - Ch5 - Strength and Deformation PDFStar998No ratings yet
- Chapt 3 2 OptimizationDocument16 pagesChapt 3 2 OptimizationsamuelgselassieNo ratings yet
- FEM Part 1Document20 pagesFEM Part 1samuelgselassieNo ratings yet
- Chapter 3-Materials in Prestressed ConcreteDocument55 pagesChapter 3-Materials in Prestressed ConcretesamuelgselassieNo ratings yet
- FEM Part 2Document15 pagesFEM Part 2samuelgselassieNo ratings yet
- Optimal Stability Design of Thin-WalledDocument1,313 pagesOptimal Stability Design of Thin-WalledsamuelgselassieNo ratings yet
- Manual Eval Rehab Strength Low Vol Brdgs 1993Document275 pagesManual Eval Rehab Strength Low Vol Brdgs 1993samuelgselassieNo ratings yet
- Fundamentals of Centrifugal PumpsDocument70 pagesFundamentals of Centrifugal PumpsFrancisco GarcíaNo ratings yet
- Gusset Plate ChecksDocument7 pagesGusset Plate ChecksJe-sim'iel AbinalNo ratings yet
- CRUIDE OIL Tank Foundation - Design - REVDocument16 pagesCRUIDE OIL Tank Foundation - Design - REVchakrapanithotaNo ratings yet
- 17.creep & FatigueDocument20 pages17.creep & FatigueaderancNo ratings yet
- T-Beam DesignDocument35 pagesT-Beam DesignAmal PremachandranNo ratings yet
- Tarea 1Document2 pagesTarea 1Aangel Tello PechNo ratings yet
- Data Sheet ECW 100 400Document3 pagesData Sheet ECW 100 400Vidiya NovelinNo ratings yet
- The Critical Radius of InsulationDocument2 pagesThe Critical Radius of InsulationAlejandroNo ratings yet
- Class Xi Physics Annual Exam 2017 18Document3 pagesClass Xi Physics Annual Exam 2017 18Anupam TiwariNo ratings yet
- Extruder TypesDocument36 pagesExtruder Typesrasheedshaikh2003No ratings yet
- Vapor Compression Refrigeration CyclesDocument9 pagesVapor Compression Refrigeration Cycleszakariya1989No ratings yet
- Ultem 9085 Resin: FDM Thermoplastic FilamentDocument17 pagesUltem 9085 Resin: FDM Thermoplastic FilamentkaledioskoppNo ratings yet
- Behavior and Design of Selected Elastomeric Bearing Pads PDFDocument20 pagesBehavior and Design of Selected Elastomeric Bearing Pads PDFyhszaNo ratings yet
- K HandoutsDocument8 pagesK HandoutsShahrizatSmailKassimNo ratings yet
- Numerical Investigation of Fan Performance in A Forced Draft Air-Cooled Steam CondenserDocument7 pagesNumerical Investigation of Fan Performance in A Forced Draft Air-Cooled Steam CondenserYanan CamarazaNo ratings yet
- Convection in Internal FlowsDocument7 pagesConvection in Internal Flowsmsnaghavi100% (1)
- 320D and 323D Excavator Hydraulic System 323D MHPU: DD FF BBDocument2 pages320D and 323D Excavator Hydraulic System 323D MHPU: DD FF BBJorge Mendoza100% (2)
- Fluid Flow Mean Velocity and Pipe Diameter For Known Flow RateDocument10 pagesFluid Flow Mean Velocity and Pipe Diameter For Known Flow Ratefaisal mahmood azamNo ratings yet
- Properties of Granular Food and PowdersDocument19 pagesProperties of Granular Food and PowdersArgemsisaNo ratings yet
- MCQ Thermodynamics Compressible FlowDocument4 pagesMCQ Thermodynamics Compressible FlowTochi Krishna Abhishek100% (1)
- Buckling of StrutsDocument11 pagesBuckling of StrutsIkhwan Z.91% (68)
- Effects of Temperature and Moisture On SMCDocument20 pagesEffects of Temperature and Moisture On SMCsenencostasNo ratings yet
- Design Optimization of Roller Straightening Process For Steel Cord Using Response Surface MethodologyDocument6 pagesDesign Optimization of Roller Straightening Process For Steel Cord Using Response Surface MethodologybulkformingNo ratings yet
- U5lecture 3Document21 pagesU5lecture 3nunaNo ratings yet
- Prandtl and The Göttingen School PDFDocument60 pagesPrandtl and The Göttingen School PDFmartrantNo ratings yet
- Specifications & Typical Properties For Motiva Base OilsDocument1 pageSpecifications & Typical Properties For Motiva Base OilsMassimiliano VolaNo ratings yet
- Problem Set 2: Ce123 - HydraulicsDocument2 pagesProblem Set 2: Ce123 - HydraulicsZENRIRNo ratings yet
- aLookInsideIcoFoam PDFDocument17 pagesaLookInsideIcoFoam PDFGurki MeyerNo ratings yet
- 10 Thermal Strain, Thermal DeformationDocument2 pages10 Thermal Strain, Thermal DeformationAlyssa Beatrice CuevoNo ratings yet