You might also like
- Time Series: Applications to Finance with R and S-PlusFrom EverandTime Series: Applications to Finance with R and S-PlusRating: 4 out of 5 stars4/5 (1)
- Session No 05Document4 pagesSession No 05Mohsin EhsanNo ratings yet
- Mom LAB SESSION No 9Document7 pagesMom LAB SESSION No 9m.sheraz malikNo ratings yet
- Mechanics of Material: Lab Report # 06Document6 pagesMechanics of Material: Lab Report # 06Abdul Rehman FaisalNo ratings yet
- Experiment # 10Document8 pagesExperiment # 10AbdullahNo ratings yet
- Experiment # 01Document8 pagesExperiment # 01qamarNo ratings yet
- Experiment Code - J Solid Mechanics Lab: Shashank R - ME16B164 Shubham Jain-ME16B165Document10 pagesExperiment Code - J Solid Mechanics Lab: Shashank R - ME16B164 Shubham Jain-ME16B165Purvang ParmarNo ratings yet
- 7.1 Objective:: ExperimentDocument5 pages7.1 Objective:: ExperimentGeneral ShiekhNo ratings yet
- Experiment # 1Document5 pagesExperiment # 1General ShiekhNo ratings yet
- MEM 412 - Experiment 1Document10 pagesMEM 412 - Experiment 1Akeju AyodeleNo ratings yet
- UntitledDocument15 pagesUntitledDavid Anold DubeNo ratings yet
- Lab Reporet Mom 7Document4 pagesLab Reporet Mom 7Hassam UrrehmanNo ratings yet
- Mom Write Up Manual IMEDocument39 pagesMom Write Up Manual IMEbalochfrahan.2003No ratings yet
- G - Spring Stiffness TestDocument9 pagesG - Spring Stiffness TestAditya KoutharapuNo ratings yet
- Tensile Test On Cast IronDocument15 pagesTensile Test On Cast IronElmer Ibanez JrNo ratings yet
- Experiment No 5: 5.1. ObjectiveDocument5 pagesExperiment No 5: 5.1. ObjectiveKhurram SattarNo ratings yet
- Creep TestDocument5 pagesCreep TestRockerss RockerssNo ratings yet
- Mec404 TH 226 2Document6 pagesMec404 TH 226 2commander91gamingNo ratings yet
- Spring ExperimentDocument12 pagesSpring ExperimentHoussam HijaziNo ratings yet
- ME 54 Engineering Metrology & Measurements Descriptive Type Questions Unit - IDocument9 pagesME 54 Engineering Metrology & Measurements Descriptive Type Questions Unit - ICamilas KishoreNo ratings yet
- eXPERIMENT NO 06 FMDocument9 pageseXPERIMENT NO 06 FMAsim Bajwa100% (1)
- Experiment of Mechanical EgineeringDocument66 pagesExperiment of Mechanical EgineeringAmin MalikNo ratings yet
- Phys121l Lab Act 4Document3 pagesPhys121l Lab Act 4Ronaldo MaañoNo ratings yet
- Vib Report Gear Train, Belt Drive, Chain DriveDocument6 pagesVib Report Gear Train, Belt Drive, Chain DriveSheikh SaadNo ratings yet
- Design of Levers - Hand Lever, Foot Lever, Bell Crank Lever - MACHINE DESIGN Notes, Procedures, Problems and VidsDocument22 pagesDesign of Levers - Hand Lever, Foot Lever, Bell Crank Lever - MACHINE DESIGN Notes, Procedures, Problems and Vidsعلي كامل الاسدي0% (1)
- Worm and Worm WheelDocument2 pagesWorm and Worm Wheelzacoss70% (10)
- Cranfield University: Yu JieDocument139 pagesCranfield University: Yu JiePeppito AlcazarNo ratings yet
- Group 40 - Code G - 18 September, 2017Document17 pagesGroup 40 - Code G - 18 September, 2017Aditya KoutharapuNo ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC078AvinashNo ratings yet
- Module DDocument32 pagesModule DfaizalfitriahaliNo ratings yet
- Deformation On A Propped Beam: Experiment No. - 5Document4 pagesDeformation On A Propped Beam: Experiment No. - 5tinnthegreatNo ratings yet
- Lab 4-V I Characteristics of PN Diode and Zener Regulator PDFDocument9 pagesLab 4-V I Characteristics of PN Diode and Zener Regulator PDFpubg662299No ratings yet
- Engg DynamicsDocument26 pagesEngg DynamicssadiaNo ratings yet
- Edl 47Document36 pagesEdl 47sadiaNo ratings yet
- Experiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073Document7 pagesExperiment - 1 Date: 03/08/2021 Aim: Theory:: Roll No.: U18EC073AvinashNo ratings yet
- MECH3410 Lab ReportDocument5 pagesMECH3410 Lab ReportNamit Jain0% (1)
- Hadeel Al-Kurdi Lab Report 1Document10 pagesHadeel Al-Kurdi Lab Report 1Haidy T. SakrNo ratings yet
- MEC291 Mechanics and Materials Laboratory ManualDocument16 pagesMEC291 Mechanics and Materials Laboratory ManualLAILATUL ATILA0% (1)
- Crankshaft: Page NoDocument13 pagesCrankshaft: Page NoAmit GauravNo ratings yet
- Experiment No 6: To Perform The Torsion Test and Determine The Modulus of Resilience of A Given SpecimenDocument8 pagesExperiment No 6: To Perform The Torsion Test and Determine The Modulus of Resilience of A Given SpecimenKhurram SattarNo ratings yet
- U18ec038 - Ei - Lab 1Document7 pagesU18ec038 - Ei - Lab 1Timir PatelNo ratings yet
- Experiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelDocument7 pagesExperiment - 1 Date: 02/08/2021 Aim: Theory:: Roll No.: U18EC038 Name.: Timir PatelTimir PatelNo ratings yet
- Bending Moment in A BeamDocument22 pagesBending Moment in A BeamRobert Fow JOENo ratings yet
- 200 PDFDocument10 pages200 PDFazdNo ratings yet
- Experiment No. - 05 Date: 12-02-24 Working With I To P and P To I Converters AIMDocument4 pagesExperiment No. - 05 Date: 12-02-24 Working With I To P and P To I Converters AIMMohd RehanNo ratings yet
- Experiment 9Document8 pagesExperiment 9Tayyab AliNo ratings yet
- Ohms Law and Resistance Virtual Lab PHET Lesson 9 and 10Document5 pagesOhms Law and Resistance Virtual Lab PHET Lesson 9 and 10Ghala AlHarmoodiNo ratings yet
- Impacct of JetDocument7 pagesImpacct of Jetحسين عمريNo ratings yet
- CH3510 Momentum Transfer and MO Lab: 7.flow Through VenturimeterDocument8 pagesCH3510 Momentum Transfer and MO Lab: 7.flow Through VenturimeterAwik DharNo ratings yet
- Lab Report 5Document2 pagesLab Report 5Kamran AliNo ratings yet
- Experiment No 4: 4.1. ObjectiveDocument9 pagesExperiment No 4: 4.1. ObjectiveKhurram SattarNo ratings yet
- Workshop Manual 15wsl24 PDFDocument94 pagesWorkshop Manual 15wsl24 PDFZiyauddin SeikhNo ratings yet
- Experiment No 3Document16 pagesExperiment No 3Muhammad FurqanNo ratings yet
- Contact and Transient Analysis of Cam and Follower MechanismDocument6 pagesContact and Transient Analysis of Cam and Follower MechanismEditor IJTSRDNo ratings yet
- Exp 2Document11 pagesExp 2fu MozaNo ratings yet
- Experiment 1: University of BalamandDocument11 pagesExperiment 1: University of Balamandlaura sageNo ratings yet
- Fluid Lap ReportDocument11 pagesFluid Lap ReportMoamen ElsaidNo ratings yet
- Festo Pneumatics BasicDocument122 pagesFesto Pneumatics BasicabrfinNo ratings yet
- Movement Equations 2: Mathematical and Methodological SupplementsFrom EverandMovement Equations 2: Mathematical and Methodological SupplementsNo ratings yet
- Session No 11Document3 pagesSession No 11Mohsin EhsanNo ratings yet
- Session No 09Document3 pagesSession No 09Mohsin EhsanNo ratings yet
- Session No 04Document3 pagesSession No 04Mohsin EhsanNo ratings yet
- Session No 01Document5 pagesSession No 01Mohsin EhsanNo ratings yet
- Session No 02Document5 pagesSession No 02Mohsin EhsanNo ratings yet
- Session No 03Document3 pagesSession No 03Mohsin EhsanNo ratings yet
- Muhammad Mohsin Ehsan: Open Ended LabDocument4 pagesMuhammad Mohsin Ehsan: Open Ended LabMohsin EhsanNo ratings yet
- Muhammad Mohsin Ehsan: Open Ended LabDocument4 pagesMuhammad Mohsin Ehsan: Open Ended LabMohsin EhsanNo ratings yet
- Energy EducationDocument46 pagesEnergy EducationCharol AoayNo ratings yet
- Single Slider Crank Mechanism 1Document15 pagesSingle Slider Crank Mechanism 1Muhammad UsmanNo ratings yet
- 12 Euro III Engine-N900 Series JMCDocument91 pages12 Euro III Engine-N900 Series JMCRusonegroNo ratings yet
- Engine, Dismantling D11MDocument23 pagesEngine, Dismantling D11MAMIT SINGHNo ratings yet
- 3UR-FE Engine ProperDocument8 pages3UR-FE Engine Properwilliam86% (7)
- Remove and Install Crankshaft Main BearingsDocument5 pagesRemove and Install Crankshaft Main BearingsBuku DigitalNo ratings yet
- Nissan Engine MR20DE Repair Manual DownloadDocument218 pagesNissan Engine MR20DE Repair Manual DownloadMohammed Elkuni100% (8)
- (20150715)Document217 pages(20150715)Elchin320100% (1)
- Tom MCQ UNIT 1Document25 pagesTom MCQ UNIT 1Kumar PachareNo ratings yet
- 1986 - Honda HR194-HR214-HRA214 Service Manual - OCR 600dpiDocument67 pages1986 - Honda HR194-HR214-HRA214 Service Manual - OCR 600dpiEd Falck80% (5)
- Dr.-Ing. E.H. Richard Van Basshuysen, VDIDocument21 pagesDr.-Ing. E.H. Richard Van Basshuysen, VDIfildi95No ratings yet
- Acme A349 Service ManualDocument34 pagesAcme A349 Service ManualCristian DavidNo ratings yet
- Air Winch: Instructions, Parts and MaintenanceDocument21 pagesAir Winch: Instructions, Parts and MaintenanceAl Nawras FactoriesNo ratings yet
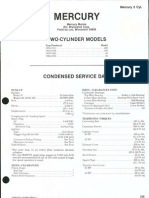
- Mercury Service ManualDocument14 pagesMercury Service ManualRobin Bradshaw72% (18)
- Workshop Manual Lga 280 OhcDocument100 pagesWorkshop Manual Lga 280 Ohcptheo2088No ratings yet
- 201703031221545638leyland PDFDocument50 pages201703031221545638leyland PDFsharan_blitzNo ratings yet
- Parts Catalog: 1BJU0-100E1 September 2002Document52 pagesParts Catalog: 1BJU0-100E1 September 2002maximchacaNo ratings yet
- Despiece Motor VOCA ZongShen.155 ZSDocument11 pagesDespiece Motor VOCA ZongShen.155 ZSanxony100% (1)
- BF4M2012CG2 Parts CatalogDocument132 pagesBF4M2012CG2 Parts CatalogAndreyIvanovNo ratings yet
- Master Mf8600 WSM 02 enDocument366 pagesMaster Mf8600 WSM 02 enSelmirije2100% (3)
- Project Report On: Repair and Maintenance of High Horse Power Diesel Locomotive Traction MotorDocument33 pagesProject Report On: Repair and Maintenance of High Horse Power Diesel Locomotive Traction MotorDarshan H RNo ratings yet
- CompressorDocument29 pagesCompressorShashi Naganur100% (1)
- Manual de Partes (Extraído) PDFDocument8 pagesManual de Partes (Extraído) PDFAlex TrujilloNo ratings yet
- Gasgas Enduro 200-250-300 2T 2018 Workshop ManualDocument72 pagesGasgas Enduro 200-250-300 2T 2018 Workshop ManualAleš ZaverlaNo ratings yet
- (TM) Ford Manual de Taller Ford Super Duty 2007 2008 en InglesDocument747 pages(TM) Ford Manual de Taller Ford Super Duty 2007 2008 en Inglesjuan carlos delgadoNo ratings yet
- Sperre Air Compressor HV2-200Document30 pagesSperre Air Compressor HV2-200Tomislav Korencic75% (4)
- Dynamics Question Bank PDFDocument21 pagesDynamics Question Bank PDFbejumohanNo ratings yet
- Engine IdentificationDocument30 pagesEngine Identificationgerber damianNo ratings yet
- Radial EngineDocument8 pagesRadial EnginelucisteauaNo ratings yet
- Isuzu c240 EngineDocument38 pagesIsuzu c240 Enginejads30117985% (33)