You might also like
- Motor Calculation of CraneDocument6 pagesMotor Calculation of Craneliftline engineersNo ratings yet
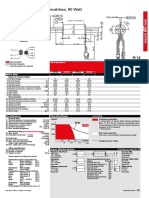
- EC - Max 30 30 MM, Brushless, 60 Watt: Part NumbersDocument1 pageEC - Max 30 30 MM, Brushless, 60 Watt: Part NumbersfurkanfurkanfurkanNo ratings yet
- Clutch DesignDocument7 pagesClutch DesignGökhan YazarNo ratings yet
- En 21 251Document1 pageEn 21 251Froylan OchoaNo ratings yet
- Live Load Distribution Factor CalculationsDocument5 pagesLive Load Distribution Factor CalculationsBunkun15No ratings yet
- Maxon EC-Max22 25wattDocument1 pageMaxon EC-Max22 25wattElectromateNo ratings yet
- BridgeDocument8 pagesBridgeTuklal Chaudhary100% (1)
- Gantry Girder DesignDocument20 pagesGantry Girder DesignMohammed Saleem Syed Khader100% (2)
- Midas3 0Document9 pagesMidas3 0Kelly ObrienNo ratings yet
- Pd1 (KN) Pu (KN) M1s (KN-M) M1ns (KN-M) M2ns (KN-M) M2s (KN-M)Document21 pagesPd1 (KN) Pu (KN) M1s (KN-M) M1ns (KN-M) M2ns (KN-M) M2s (KN-M)Kayla DimaanoNo ratings yet
- Palm Oil Mill - FFB Conveyor Sizing BDocument4 pagesPalm Oil Mill - FFB Conveyor Sizing BAmin Buhari Md Zain100% (5)
- Maxon EC-Powermax30 200wattDocument1 pageMaxon EC-Powermax30 200wattElectromateNo ratings yet
- Agitator - Ag-C8-102Document4 pagesAgitator - Ag-C8-102uttam prabhuNo ratings yet
- EC 90 Flat: 90 MM, Brushless, 600 WattDocument1 pageEC 90 Flat: 90 MM, Brushless, 600 WattDiy DoeNo ratings yet
- Maxon DCXDocument23 pagesMaxon DCXMurtaza KhanNo ratings yet
- 17 en 170 Lstage DatasheetDocument1 page17 en 170 Lstage DatasheetSana SyedNo ratings yet
- Maxon EC-Max40 70wattDocument1 pageMaxon EC-Max40 70wattElectromateNo ratings yet
- CALS C3 Axe 2, Axe GDocument6 pagesCALS C3 Axe 2, Axe GmohamedabdelalNo ratings yet
- Belt CalculationDocument61 pagesBelt CalculationtranceinttNo ratings yet
- 12 171 enDocument1 page12 171 enLuka MadridNo ratings yet
- Maxon EC-Max30 40wattDocument1 pageMaxon EC-Max30 40wattElectromateNo ratings yet
- Worked Examples For A Three - Phase Induction MachineDocument12 pagesWorked Examples For A Three - Phase Induction MachineAli AltahirNo ratings yet
- Tutorial 3 LoadDocument6 pagesTutorial 3 LoadIriest SumaryantoNo ratings yet
- SM200 30C-9 6kw-10peopleDocument3 pagesSM200 30C-9 6kw-10peopleMajed MahmoudNo ratings yet
- C1 SuperstructureDocument6 pagesC1 SuperstructureEdan John HernandezNo ratings yet
- C1 SubstructureDocument6 pagesC1 SubstructureEdan John HernandezNo ratings yet
- EC 40 40 MM, Brushless, 170 Watt: Part NumbersDocument1 pageEC 40 40 MM, Brushless, 170 Watt: Part NumbersfurkanfurkanfurkanNo ratings yet
- DC ServoDocument17 pagesDC ServoMuhammad Iqbal ZahidNo ratings yet
- Composite Bridge Design CalculatorDocument20 pagesComposite Bridge Design CalculatoriGp2013No ratings yet
- Computer Aided Design of Feed Drives For CNC Machine ToolsDocument6 pagesComputer Aided Design of Feed Drives For CNC Machine ToolsDĕĕpáķ ŚĥáŕmáNo ratings yet
- F. Rancangan Motor Penggerak Berikut Ini Adalah Perhitungan Daya Yang DidapatDocument3 pagesF. Rancangan Motor Penggerak Berikut Ini Adalah Perhitungan Daya Yang DidapatBima SysAdminNo ratings yet
- En 21 250Document1 pageEn 21 250compimagmaticNo ratings yet
- Calculation of Research PaperDocument2 pagesCalculation of Research PaperMahesh ChavanNo ratings yet
- UntitledDocument14 pagesUntitledDương Hữu PhươngNo ratings yet
- Maxon Ec45 136210Document1 pageMaxon Ec45 136210compimagmaticNo ratings yet
- Crane Wheel Load CalculationDocument12 pagesCrane Wheel Load Calculationmaheshbandham100% (1)
- Tính ToánDocument5 pagesTính ToánTrần Thái ThuậnNo ratings yet
- Machine Design 1: College of EngineeringDocument10 pagesMachine Design 1: College of EngineeringThink EngineeringNo ratings yet
- Example 2: Crane (Hoist Application) : Braking Calculation 03Document3 pagesExample 2: Crane (Hoist Application) : Braking Calculation 03A Tai TrieuNo ratings yet
- Gear Motors MoveDocument8 pagesGear Motors MoveAlejandroGonzagaNo ratings yet
- PDF SF BMD and Spindle DesignDocument65 pagesPDF SF BMD and Spindle DesignPRAVEEN ENo ratings yet
- XX2 PDFDocument3 pagesXX2 PDFgarysootetNo ratings yet
- ncs0111513 16Document118 pagesncs0111513 16maximus2297No ratings yet
- BEK3053EK304 - Lec04 - Hydraulic Motor-2023-05Document25 pagesBEK3053EK304 - Lec04 - Hydraulic Motor-2023-05mahrusNo ratings yet
- Maxon RE40 Graphite Brushes 150wattDocument1 pageMaxon RE40 Graphite Brushes 150wattElectromateNo ratings yet
- Handouts Prepared by Engr. Bernardo: Machine Design 1Document9 pagesHandouts Prepared by Engr. Bernardo: Machine Design 1Kenn Earl Bringino VillanuevaNo ratings yet
- Maxon EC22 20watt Integrated ElectronicsDocument2 pagesMaxon EC22 20watt Integrated ElectronicsElectromateNo ratings yet
- Chap 5 - Chain DriveDocument27 pagesChap 5 - Chain DriveTiến LêNo ratings yet
- AbaqusDocument9 pagesAbaqusAlfredo Soliz GamboaNo ratings yet
- Calculation Salim 1Document9 pagesCalculation Salim 1Abdullahi AwwalNo ratings yet
- W 11 LB W 2 LB: Pulley Bevel Gear 1Document3 pagesW 11 LB W 2 LB: Pulley Bevel Gear 1Bayu SuprayogiNo ratings yet
- Catalog Motor EC90Flat 323772Document1 pageCatalog Motor EC90Flat 323772Lucas SuplinoNo ratings yet
- Kabilan S Karunakaran P Nikhil Anand T Ragesh T CB - EN.U4EEE16115 CB - EN.U4EEE16121 CB - EN.U4EEE16131 CB - EN.U4EEE16144Document2 pagesKabilan S Karunakaran P Nikhil Anand T Ragesh T CB - EN.U4EEE16115 CB - EN.U4EEE16121 CB - EN.U4EEE16131 CB - EN.U4EEE16144KabilanNo ratings yet
- Kumar2 KityDocument5 pagesKumar2 Kity2B Dai Ko DUPLICATENo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo ratings yet
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Specifications enDocument6 pagesSpecifications enkorkieNo ratings yet
- GRoW DatasheetDocument2 pagesGRoW DatasheetkorkieNo ratings yet
- Um600129 Rev eDocument28 pagesUm600129 Rev ekorkieNo ratings yet
- SafetyDocument3 pagesSafetykorkieNo ratings yet
- Chapter 8 Mechanical Element 3 Belt V3Document30 pagesChapter 8 Mechanical Element 3 Belt V3korkieNo ratings yet
- Selection of Transmission Timing Belts 1: (Technical Data)Document7 pagesSelection of Transmission Timing Belts 1: (Technical Data)korkieNo ratings yet
- Tds Tech Hips 404 NaturalDocument1 pageTds Tech Hips 404 NaturalkorkieNo ratings yet
- CC072 Rev17 PDFDocument2 pagesCC072 Rev17 PDFYarid RodriguezNo ratings yet
- Vaultlands (Gaslands/Fallout Mashup) : Timeline 1969 1970 1971 1972 1973 1975 1976 1979 1982 1985 1991 1996 1998Document1 pageVaultlands (Gaslands/Fallout Mashup) : Timeline 1969 1970 1971 1972 1973 1975 1976 1979 1982 1985 1991 1996 1998fuzzy sadistNo ratings yet
- Installation and Users Guide MI 8 Interface UnitDocument18 pagesInstallation and Users Guide MI 8 Interface Unitleon100% (1)
- H 4071 8504 04 A - Omp40 2 - (Ig) - enDocument48 pagesH 4071 8504 04 A - Omp40 2 - (Ig) - enRory CollinsNo ratings yet
- How Do I Use Batchprocess: TutorialDocument9 pagesHow Do I Use Batchprocess: TutorialLulocle LulocleNo ratings yet
- OMI-2H Optical Machine Interface: Installation GuideDocument30 pagesOMI-2H Optical Machine Interface: Installation GuidekorkieNo ratings yet
- Proposed Weapons, Equipment, and SkillsDocument4 pagesProposed Weapons, Equipment, and SkillskorkieNo ratings yet
- Splendor Card List With PicsDocument5 pagesSplendor Card List With Picskorkie100% (1)
- Gaslands Bases - General Rules-1Document1 pageGaslands Bases - General Rules-1korkieNo ratings yet
- Rusted Steel Beams: Gaslands Posts by Rich Hangonlads VyseDocument3 pagesRusted Steel Beams: Gaslands Posts by Rich Hangonlads VysekorkieNo ratings yet
- Manual Delftship 920 304 Mc0Document81 pagesManual Delftship 920 304 Mc0Chahbi RamziNo ratings yet
- Chariotlands RulesDocument1 pageChariotlands Ruleskorkie100% (1)
- 4 201702081157180261Document3 pages4 201702081157180261korkieNo ratings yet
- Practical No. 10: A. Reciprocating CompressorDocument4 pagesPractical No. 10: A. Reciprocating CompressorJyoti Ben PatelNo ratings yet
- Partner 351,370,390,420 (1998.)Document3 pagesPartner 351,370,390,420 (1998.)Sini40No ratings yet
- Parts & Service Manual - Tt4-8 Isuzu 4jb1 and 4jg1 DieselDocument85 pagesParts & Service Manual - Tt4-8 Isuzu 4jb1 and 4jg1 DieselJonathan100% (3)
- MUD PUMP PZ - 7 A 11 Service Manual PDFDocument41 pagesMUD PUMP PZ - 7 A 11 Service Manual PDFHenry Alfaro Bermudez80% (5)
- Pmac DSDocument4 pagesPmac DSjasonlindoNo ratings yet
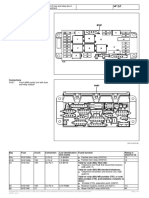
- Ecu Pin TablesDocument2 pagesEcu Pin Tablesdendroot50% (2)
- 44 To 65 Socket N10/1 Front SAM Control Unit With Fuse and Relay Module 43a Socket 43b SocketDocument3 pages44 To 65 Socket N10/1 Front SAM Control Unit With Fuse and Relay Module 43a Socket 43b SocketClaudiu Dragan50% (2)
- Impounding Receipt of Motor Vehicle: Provincial Highway Patrol Team-BulacanDocument2 pagesImpounding Receipt of Motor Vehicle: Provincial Highway Patrol Team-BulacanAndrew Salamat100% (1)
- Bearing DesignationsDocument5 pagesBearing Designationsedwinsazzz100% (5)
- Oil - Gear - Pump OperationDocument18 pagesOil - Gear - Pump OperationDaniel Alfonso Diaz FloresNo ratings yet
- Install Gas Separator 2.6Document3 pagesInstall Gas Separator 2.6Bombasticos FcNo ratings yet
- Car Diagnostics, OBDII, Error CodesDocument45 pagesCar Diagnostics, OBDII, Error CodesDimitris Delta83% (18)
- BMW PcodesDocument220 pagesBMW Pcodesvahur_s100% (1)
- History of The Automobile - RussiaDocument52 pagesHistory of The Automobile - Russiafiat127sportNo ratings yet
- Series: Rotary Union SolutionsDocument18 pagesSeries: Rotary Union SolutionsDhairyasheel BhutkarNo ratings yet
- Ford Tractor Service Manual Fo S Tw10Document27 pagesFord Tractor Service Manual Fo S Tw10Adrian CazacNo ratings yet
- Leave It To The Experts Who Built Your Engine!Document4 pagesLeave It To The Experts Who Built Your Engine!guichen wangNo ratings yet
- Operating Manual: Planetary Gearbox EP - 45Document51 pagesOperating Manual: Planetary Gearbox EP - 45Ravi RamdeoNo ratings yet
- Lubricants Fundamentals IociDocument84 pagesLubricants Fundamentals IociSrikanth AnchulaNo ratings yet
- Manitowoc 14000: Product GuideDocument36 pagesManitowoc 14000: Product GuideSitecsaNo ratings yet
- Aoe 12V4000L62 Ratings and Emissions 1: Technical Description TB 46204 F 50Document7 pagesAoe 12V4000L62 Ratings and Emissions 1: Technical Description TB 46204 F 50mgewaliNo ratings yet
- L06 Piston Pump Data L06 Specifications: 12.3 BHP Continuous Duty (17.6 BHP Intermittent Duty)Document2 pagesL06 Piston Pump Data L06 Specifications: 12.3 BHP Continuous Duty (17.6 BHP Intermittent Duty)johansolNo ratings yet
- Kinematics of MachineryDocument8 pagesKinematics of MachinerySri RNo ratings yet
- ODU Installation Manual (MINI VRF)Document14 pagesODU Installation Manual (MINI VRF)rodolfo del yerroNo ratings yet
- Basic Electricity TleDocument23 pagesBasic Electricity TleCristian Gallanosa HastaNo ratings yet
- Total Solution For Gear MachiningDocument12 pagesTotal Solution For Gear Machiningalecandro_90No ratings yet
- Oil List: Audi Front Axle DriveDocument35 pagesOil List: Audi Front Axle DriveAska QianNo ratings yet
- Free Electric Power WindmillDocument3 pagesFree Electric Power WindmillJim100% (4)
- Unit Injector Synchronization - AdjustDocument5 pagesUnit Injector Synchronization - AdjustAhmed Rezk100% (1)
- Data Sheet LEO50GTDocument2 pagesData Sheet LEO50GTMelissa BrownNo ratings yet