You might also like
- Image Preprocessing For Efficient Training of YOLO Deep Learning NetworksDocument3 pagesImage Preprocessing For Efficient Training of YOLO Deep Learning NetworksTic ONNo ratings yet
- Irjet V7i3756Document5 pagesIrjet V7i3756Bharat PantNo ratings yet
- MJEER-Volume 30-Issue 1 - Page 52-57Document6 pagesMJEER-Volume 30-Issue 1 - Page 52-57ikhwancules46No ratings yet
- Object Detection Using Image ProcessingDocument17 pagesObject Detection Using Image ProcessingSumit SinghNo ratings yet
- Multiple Object Detection and Tracking: 1912405@nec - Edu.in 1912036@nec - Edu.in 1912011@nec - Edu.inDocument7 pagesMultiple Object Detection and Tracking: 1912405@nec - Edu.in 1912036@nec - Edu.in 1912011@nec - Edu.inSRIRAM PNo ratings yet
- Object Dectection in Low LightDocument6 pagesObject Dectection in Low Lighthasnaa EhabNo ratings yet
- Experiment 5: DigitalDocument3 pagesExperiment 5: DigitalSwarali PurandareNo ratings yet
- Yolov3Document42 pagesYolov3Mc SwathiNo ratings yet
- Image Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningFrom EverandImage Classification: Step-by-step Classifying Images with Python and Techniques of Computer Vision and Machine LearningNo ratings yet
- Summary CNNDocument2 pagesSummary CNNHimanshu ChoudharyNo ratings yet
- Le y Yang - Tiny ImageNet Visual Recognition ChallengeDocument6 pagesLe y Yang - Tiny ImageNet Visual Recognition Challengemusicalización pacíficoNo ratings yet
- Detection and Content Retrieval of Object in An Image Using YOLODocument8 pagesDetection and Content Retrieval of Object in An Image Using YOLOmamta kweeraNo ratings yet
- Image Analysis Morphology PracticalDocument15 pagesImage Analysis Morphology PracticalRushan TanNo ratings yet
- Unified, Real-Time Object Detection with YOLODocument10 pagesUnified, Real-Time Object Detection with YOLODavid BudaghyanNo ratings yet
- Red Mon 2016Document10 pagesRed Mon 2016Anand Balagar [021]No ratings yet
- Object Detection Using Stacked Yolov3: Ingénierie Des Systèmes D Information November 2020Document8 pagesObject Detection Using Stacked Yolov3: Ingénierie Des Systèmes D Information November 2020lamine karousNo ratings yet
- NB2121 Practical 3 ExercisesDocument15 pagesNB2121 Practical 3 ExercisesRushan TanNo ratings yet
- How It WorksDocument9 pagesHow It WorksRavenKunレイブンNo ratings yet
- LowFrameRateTracking 1Document8 pagesLowFrameRateTracking 1Saeideh OraeiNo ratings yet
- IJRPR7632Document8 pagesIJRPR7632projects allNo ratings yet
- Wu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperDocument10 pagesWu Unsupervised Joint 3D Object Model Learning and 6D Pose Estimation ICCVW 2019 PaperIbon MerinoNo ratings yet
- Matlab Deep Learning SeriesDocument6 pagesMatlab Deep Learning Serieszym1003No ratings yet
- Week - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Document7 pagesWeek - 5 (Deep Learning) Q. 1) Explain The Architecture of Feed Forward Neural Network or Multilayer Perceptron. (12 Marks)Mrunal BhilareNo ratings yet
- Kalal PAMI 2011Document14 pagesKalal PAMI 2011aidawei001No ratings yet
- Unified Real-Time Object Detection with YOLODocument10 pagesUnified Real-Time Object Detection with YOLOfernandovaras2005No ratings yet
- Deep Learning ModelsDocument18 pagesDeep Learning Modelssajid8887570788No ratings yet
- Reinforcement Learning Robotic ArmDocument8 pagesReinforcement Learning Robotic ArmmarcoNo ratings yet
- CS7643: Deep Learning Assignment 3: Instructor: Zsolt Kira Deadline: 11:59pm Mar 14, 2021, ESTDocument12 pagesCS7643: Deep Learning Assignment 3: Instructor: Zsolt Kira Deadline: 11:59pm Mar 14, 2021, ESTKev LaiNo ratings yet
- IJREAMV06I0161004Document5 pagesIJREAMV06I0161004Jay BoradeNo ratings yet
- Multimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inDocument4 pagesMultimode Foreground Detection Using Surf Algorithm: Abstract-Video Surveillance Is Active Research Topic inTechnos_IncNo ratings yet
- Experiment 9 AISCDocument13 pagesExperiment 9 AISCfacad22886No ratings yet
- Victim Detection With Infrared Camera in A "Rescue Robot": Saeed MoradiDocument7 pagesVictim Detection With Infrared Camera in A "Rescue Robot": Saeed MoradiKucIng HijAuNo ratings yet
- Train neural network colorize grayscale imagesDocument3 pagesTrain neural network colorize grayscale imageshumritha kNo ratings yet
- Real-Time Face Pose Estimation Using Deep LearningDocument13 pagesReal-Time Face Pose Estimation Using Deep LearningJandres MaldonadoNo ratings yet
- Object and Obstacle Detection with Voice Guidance for Visually ImpairedDocument10 pagesObject and Obstacle Detection with Voice Guidance for Visually ImpairedBabi NunnaguppalaNo ratings yet
- "I C U N N ": Mage Lassification Sing Eural EtworksDocument15 pages"I C U N N ": Mage Lassification Sing Eural Etworksbabloo veluvoluNo ratings yet
- 9 Learning From Synthetic Data GDocument5 pages9 Learning From Synthetic Data GNeo ZroNo ratings yet
- A Deep Approach To Image Matting ReportDocument9 pagesA Deep Approach To Image Matting ReportNikhil RayaproluNo ratings yet
- Online Multi-Object Tracking via Reinforcement LearningDocument9 pagesOnline Multi-Object Tracking via Reinforcement LearningSaeideh OraeiNo ratings yet
- Show, Attend and Play Using Deep Reinforcement Learning: ProposalDocument2 pagesShow, Attend and Play Using Deep Reinforcement Learning: ProposalkocchopNo ratings yet
- Csci5561 Project ProposalDocument4 pagesCsci5561 Project Proposalapi-532235280No ratings yet
- Automatic Tag To RegionDocument24 pagesAutomatic Tag To RegionTick TackNo ratings yet
- Summary of Coloring Black and White World Using Deep Neural NetsDocument4 pagesSummary of Coloring Black and White World Using Deep Neural NetsAkib AlveeNo ratings yet
- VGG Object Category DetectionDocument11 pagesVGG Object Category DetectionDrinkSlurpNo ratings yet
- ML Capstone Solves Dog Breed ClassificationDocument12 pagesML Capstone Solves Dog Breed ClassificationNaveen GuptaNo ratings yet
- DL Unit - 5Document14 pagesDL Unit - 5Kalpana MNo ratings yet
- Panorama StitchingDocument15 pagesPanorama StitchingKedia Rahul100% (1)
- Hybrid Approach For Semantic Object Detection in VideoDocument4 pagesHybrid Approach For Semantic Object Detection in VideoIJSTENo ratings yet
- Object Detection PresentationDocument28 pagesObject Detection PresentationAkshat JainNo ratings yet
- Object Detection Method Based On YOLOv3 Using - Deep Learning NetworksDocument4 pagesObject Detection Method Based On YOLOv3 Using - Deep Learning NetworksLauraCamilaDuqueNo ratings yet
- Detect plant diseases using deep learningDocument17 pagesDetect plant diseases using deep learningSuresh BalpandeNo ratings yet
- Few Shot LearningDocument1 pageFew Shot LearningFake AccNo ratings yet
- Tracking Learning DetectionDocument14 pagesTracking Learning DetectionJason SchneiderNo ratings yet
- 2003 07442v1 PDFDocument7 pages2003 07442v1 PDFKhin Cho WinNo ratings yet
- Deep LearningDocument9 pagesDeep LearningAnonymous xMYE0TiNBcNo ratings yet
- A Hierarchical Visual Model For Video Object SummarizationDocument13 pagesA Hierarchical Visual Model For Video Object SummarizationMoorthi VeluNo ratings yet
- Icra10 MultiCameraObjectDetectionDocument8 pagesIcra10 MultiCameraObjectDetectionsigmateNo ratings yet
- Image Captioning Model Using Attention and ObjectDocument17 pagesImage Captioning Model Using Attention and ObjectArun Pratap SinghNo ratings yet
- Deep Learning: (Most Slides Courtesy of Mauro Castelli, New University of Lisbon, Portugal)Document40 pagesDeep Learning: (Most Slides Courtesy of Mauro Castelli, New University of Lisbon, Portugal)Luca GuglielmiNo ratings yet
- Transmission Outages and GADS ReportingDocument1 pageTransmission Outages and GADS ReportingsamsNo ratings yet
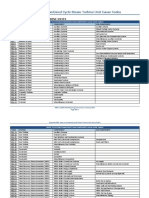
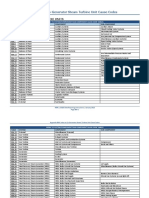
- Index to Co-Generator Gas Turbine Cause Code TablesDocument59 pagesIndex to Co-Generator Gas Turbine Cause Code TablessamsNo ratings yet
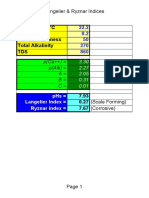
- Calculator LangelierRyznarDocument1 pageCalculator LangelierRyznarsamsNo ratings yet
- 2022 Conventional GADS Training Module 02 History of NERC and GADSDocument15 pages2022 Conventional GADS Training Module 02 History of NERC and GADSsamsNo ratings yet
- Unit Type Codes and NamesDocument657 pagesUnit Type Codes and NamessamsNo ratings yet
- Appendix B02 Combined Cycle Steam Turbine Unit Cause Codes 2023 DRIDocument60 pagesAppendix B02 Combined Cycle Steam Turbine Unit Cause Codes 2023 DRIsamsNo ratings yet
- Appendix B06: Index To Combined Cycle Unit Cause CodesDocument72 pagesAppendix B06: Index To Combined Cycle Unit Cause CodessamsNo ratings yet
- GADS FAQ: Document Duct Burners in CCGT UnitsDocument1 pageGADS FAQ: Document Duct Burners in CCGT UnitssamsNo ratings yet
- Appendix B04 CoGenerator Steam Turbine Unit Cause Codes 2023 DRIDocument59 pagesAppendix B04 CoGenerator Steam Turbine Unit Cause Codes 2023 DRIsamsNo ratings yet
- Divergence Between PJM - NE-ISO - MISO and NERC GADS 2016Document10 pagesDivergence Between PJM - NE-ISO - MISO and NERC GADS 2016samsNo ratings yet
- Appendix E5: Unit Design Data - Hydro or Pumped Storage (Voluntary Reporting)Document3 pagesAppendix E5: Unit Design Data - Hydro or Pumped Storage (Voluntary Reporting)samsNo ratings yet
- Conventional GADS FAQ 014-DSDocument1 pageConventional GADS FAQ 014-DSsamsNo ratings yet
- Combined Cycle Design and Unit DetailsDocument22 pagesCombined Cycle Design and Unit DetailssamsNo ratings yet
- Appendix E6: Unit Design Data - Gas Turbine or Jet Engine (Voluntary Reporting)Document5 pagesAppendix E6: Unit Design Data - Gas Turbine or Jet Engine (Voluntary Reporting)samsNo ratings yet
- Appendix E7: Unit Design Data - Miscellaneous (Voluntary Reporting)Document4 pagesAppendix E7: Unit Design Data - Miscellaneous (Voluntary Reporting)samsNo ratings yet
- Appendix B09: Index To Gas Turbine/Jet Engine Unit Cause CodesDocument40 pagesAppendix B09: Index To Gas Turbine/Jet Engine Unit Cause CodessamsNo ratings yet
- Combustion Optimization For Coal Fired Power Plant Boilers Based On Imporoved Distributed ELM and Distibuted PSODocument24 pagesCombustion Optimization For Coal Fired Power Plant Boilers Based On Imporoved Distributed ELM and Distibuted PSOsamsNo ratings yet
- Appendix E4: Unit Design Data - Internal Combustion / Reciprocating Engine (Voluntary Reporting)Document3 pagesAppendix E4: Unit Design Data - Internal Combustion / Reciprocating Engine (Voluntary Reporting)samsNo ratings yet
- Appendix B10: Index To Geothermal Unit Cause CodesDocument28 pagesAppendix B10: Index To Geothermal Unit Cause CodessamsNo ratings yet
- Appendix B11: Index To Internal Combustion/Reciprocating Engine Unit Cause CodesDocument27 pagesAppendix B11: Index To Internal Combustion/Reciprocating Engine Unit Cause CodessamsNo ratings yet
- Appendix E3: Unit Design Data - Nuclear (Voluntary Reporting)Document5 pagesAppendix E3: Unit Design Data - Nuclear (Voluntary Reporting)samsNo ratings yet
- Fall Oxidation Degradation of O2 Scavengers PDFDocument8 pagesFall Oxidation Degradation of O2 Scavengers PDFFernando CarrascoNo ratings yet
- ITTC - Recommended Procedures and Guidelines: Guide To The Expression of Uncertainty in Experimental HydrodynamicsDocument18 pagesITTC - Recommended Procedures and Guidelines: Guide To The Expression of Uncertainty in Experimental HydrodynamicssamsNo ratings yet
- Feedwater Pump Turbine Controls and Oil System Maintenance Guide PDFDocument196 pagesFeedwater Pump Turbine Controls and Oil System Maintenance Guide PDFsamsNo ratings yet
- EJC167219Document10 pagesEJC167219samsNo ratings yet
- Sop CipDocument2 pagesSop CipsamsNo ratings yet
- Deepfacelab: Integrated, Flexible and Extensible Face-Swapping FrameworkDocument10 pagesDeepfacelab: Integrated, Flexible and Extensible Face-Swapping FrameworksamsNo ratings yet
- Data Normalization for RO System Performance MonitoringDocument4 pagesData Normalization for RO System Performance MonitoringsamsNo ratings yet
- Table 4 Normalized RO Data Using Toraytrak SoftwareDocument27 pagesTable 4 Normalized RO Data Using Toraytrak SoftwaresamsNo ratings yet
- Instruction Manual HFU-typeHN 201610Document35 pagesInstruction Manual HFU-typeHN 201610samsNo ratings yet
- Grade 5,6 TangramDocument4 pagesGrade 5,6 Tangramapi-282820976No ratings yet
- Ed 311 Final Portfolio FallDocument4 pagesEd 311 Final Portfolio Fallapi-509360896No ratings yet
- State Trait SpielbergDocument114 pagesState Trait Spielbergguerirem hanane100% (1)
- COT DLPDocument3 pagesCOT DLPAngelica BelardoNo ratings yet
- Howtogiveselfintroductionininterview - blogspot.in-hOW To GIVE SELF INTRODUCTION in ITERVIEWDocument5 pagesHowtogiveselfintroductionininterview - blogspot.in-hOW To GIVE SELF INTRODUCTION in ITERVIEWAnil BambuleNo ratings yet
- Fuzzy Model For Parameterized Sign Language-Sumaira Kausar-IJEACS-01-01Document9 pagesFuzzy Model For Parameterized Sign Language-Sumaira Kausar-IJEACS-01-01IJEACS UKNo ratings yet
- Review Why Do We Care About Literary CharactersDocument6 pagesReview Why Do We Care About Literary CharactersLeonardoNo ratings yet
- WGU Teacher Interview FormDocument3 pagesWGU Teacher Interview Formrkvance5No ratings yet
- Smart Goals WorksheetDocument1 pageSmart Goals Worksheetapi-503237854No ratings yet
- Venture and External ExamsDocument2 pagesVenture and External ExamsmartinchooNo ratings yet
- Official Teacher ResumeDocument2 pagesOfficial Teacher Resumeapi-289471925No ratings yet
- Idioms and Proverbs in Translation and Interpretation: A Cultural ChallengeDocument7 pagesIdioms and Proverbs in Translation and Interpretation: A Cultural ChallengeAzucena Puerta-Diaz100% (1)
- Teaching Students With ADHDDocument1 pageTeaching Students With ADHDRubens RibeiroNo ratings yet
- Topics: - Communication Processes, Principles and Ethics - Local and Global Communication in Multi-Cultural SettingsDocument18 pagesTopics: - Communication Processes, Principles and Ethics - Local and Global Communication in Multi-Cultural Settingstijeje8401No ratings yet
- Ledoux's "The Deep History of Ourselves" HighlightsDocument6 pagesLedoux's "The Deep History of Ourselves" HighlightsManoj Reddy0% (1)
- Addressing The Future Curriculum InnovationsDocument19 pagesAddressing The Future Curriculum InnovationsMio Betty J. Mebolos100% (1)
- Self-Editing Worksheet 6 Chapter 6: Cause/Effect EssaysDocument2 pagesSelf-Editing Worksheet 6 Chapter 6: Cause/Effect EssaysDesi Fitria FajerinNo ratings yet
- Coursera 1Document68 pagesCoursera 140.Trần Nghĩa TrungNo ratings yet
- Personality DevelopmentDocument40 pagesPersonality DevelopmentmonalallNo ratings yet
- Roles Duties Responsibilities of A CoachDocument28 pagesRoles Duties Responsibilities of A CoachCristal Iba?zNo ratings yet
- Create A Memory AlbumDocument2 pagesCreate A Memory AlbumAngelaNo ratings yet
- Effect of Stress in Academic Perfomances of A Students in Arellano UniversityDocument3 pagesEffect of Stress in Academic Perfomances of A Students in Arellano UniversityLiezel SalangaNo ratings yet
- Education System of SeoulDocument27 pagesEducation System of SeoulHazel PermejoNo ratings yet
- Psych Chapter 12 Learning Memory and Intellegence707Document13 pagesPsych Chapter 12 Learning Memory and Intellegence707Joyce MarieNo ratings yet
- Time Management Strategies by Akinfolarin A.V (2017) PDFDocument10 pagesTime Management Strategies by Akinfolarin A.V (2017) PDFAkinfolarin Akinwale VictorNo ratings yet
- Module ELT PP IDocument69 pagesModule ELT PP IJoao Alfandega100% (2)
- Journal Article Reaction PaperDocument5 pagesJournal Article Reaction Paperapi-280445345No ratings yet
- Spanish 5 VocabularyDocument42 pagesSpanish 5 Vocabularyluis lara100% (1)
- INTERPRETING SEMANTIC EXTENSIONDocument10 pagesINTERPRETING SEMANTIC EXTENSIONOktadea Herda PratiwiNo ratings yet
- Career Preference Record Intro For Class 12Document2 pagesCareer Preference Record Intro For Class 12Tulika Bhola50% (4)