You might also like
- Inverter Training ManualDocument41 pagesInverter Training ManualLisa Renee MoralesNo ratings yet
- EE380 Lab Experiment 06Document6 pagesEE380 Lab Experiment 06khaled fawazNo ratings yet
- Control System Lab Manual (EE-324-FDocument52 pagesControl System Lab Manual (EE-324-FMohammad Umar RehmanNo ratings yet
- XS 400B-03Document13 pagesXS 400B-03George Vasiliou100% (11)
- 6 TH Sem 2022Document23 pages6 TH Sem 2022AnkitNo ratings yet
- ServomechanismsDocument25 pagesServomechanismsEgor85No ratings yet
- Control Systems Lab ManualDocument67 pagesControl Systems Lab ManualRockstar Rich100% (1)
- Reading Material - ServomechanismsDocument25 pagesReading Material - ServomechanismsDimitri RamloganNo ratings yet
- (P1) Modul DC Motor Speed Control SystemDocument13 pages(P1) Modul DC Motor Speed Control SystemTito Bambang Priambodo - 6726No ratings yet
- DC Motor Speed Control System - ED4400BDocument14 pagesDC Motor Speed Control System - ED4400BDanang Pradika Purnomo100% (1)
- PID Controller for a Self-balancing Pole Using Angle Sensor and MicroprocessorDocument9 pagesPID Controller for a Self-balancing Pole Using Angle Sensor and MicroprocessorDino Ligutan100% (2)
- Experiment No: 1: Aim: Apparatus RequiredDocument29 pagesExperiment No: 1: Aim: Apparatus RequiredKarthi RamachandranNo ratings yet
- Controlling Stepper Motors With A PIC MicrocontrollerDocument16 pagesControlling Stepper Motors With A PIC Microcontrollervasudeva yasasNo ratings yet
- DC Shunt Motor Speed Control by Field & Armature MethodsDocument4 pagesDC Shunt Motor Speed Control by Field & Armature MethodsVaibhavNo ratings yet
- 2142 2 Frequency Response: Semester 5Document9 pages2142 2 Frequency Response: Semester 5Dwayne JohnsonNo ratings yet
- DC Servo Motor Control System User ManualDocument35 pagesDC Servo Motor Control System User ManualBayeNo ratings yet
- Linear Control TCDocument46 pagesLinear Control TCjibranbaladiNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- Laboratory Tutorial#1 Mcs Practicals Ms150Document20 pagesLaboratory Tutorial#1 Mcs Practicals Ms150JOSENo ratings yet
- K 6Document3 pagesK 6kashishlalaNo ratings yet
- AEROSPACE LAB EXPERIMENT ON SERVO CONTROLDocument24 pagesAEROSPACE LAB EXPERIMENT ON SERVO CONTROLhishamwahidinNo ratings yet
- Control system force-voltage analogyDocument18 pagesControl system force-voltage analogyAjeet Kumar shuklaNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Mechatronics Question BankDocument3 pagesMechatronics Question BankPiyasa DasNo ratings yet
- Drone Build PartsDocument7 pagesDrone Build PartsAngelica May BangayanNo ratings yet
- ServomechanismsDocument25 pagesServomechanismsMansour Bu MusabNo ratings yet
- Stepper Motor Basics ExplainedDocument7 pagesStepper Motor Basics ExplainedRafi Andanawari Drajat100% (1)
- P1 - DC Motor Position Control PDFDocument10 pagesP1 - DC Motor Position Control PDFSeptiani DitaNo ratings yet
- Servo FundamentalsDocument12 pagesServo FundamentalsMohanraj SelvakumarNo ratings yet
- Report Group1Document23 pagesReport Group1Sigmund SiyNo ratings yet
- 545 ct100 INDEXcE1Document26 pages545 ct100 INDEXcE1Roberto FalconeNo ratings yet
- Lab 05 (Servo)Document4 pagesLab 05 (Servo)hitesh89No ratings yet
- PID Control Guide for Hitachi SJ100/L300 InvertersDocument16 pagesPID Control Guide for Hitachi SJ100/L300 InvertersMirinhaeThiago RosárioNo ratings yet
- Practical Report 2, ProtectionDocument5 pagesPractical Report 2, ProtectionCláudio Felício VundaNo ratings yet
- LDA McqsDocument2 pagesLDA McqsImran KhanNo ratings yet
- Control LabDocument61 pagesControl LabIhsan AteyaNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- GATI - 0020 - Cycle Time Optimization - YRC1000 - GB01Document11 pagesGATI - 0020 - Cycle Time Optimization - YRC1000 - GB01JacobNo ratings yet
- Generate Power While Exercising with an Electric BicycleDocument19 pagesGenerate Power While Exercising with an Electric Bicyclenayak_bibekumarNo ratings yet
- EEE3925 HW - L3 Digital Pendulum ControlDocument4 pagesEEE3925 HW - L3 Digital Pendulum Controlaiman anuarNo ratings yet
- Control System Lab EE-324-FDocument45 pagesControl System Lab EE-324-FBalraj SinghNo ratings yet
- Department of Mechanical Engineering: Out T 0 in oDocument4 pagesDepartment of Mechanical Engineering: Out T 0 in oGeovanny AshquiNo ratings yet
- FurutaDocument6 pagesFurutaHasy_pakiNo ratings yet
- Chapter 1 Introduction: 1.1 Project Title 1.2 Project Description 1.3 Block Diagram 1.4 Application AreaDocument49 pagesChapter 1 Introduction: 1.1 Project Title 1.2 Project Description 1.3 Block Diagram 1.4 Application AreaDeepshikha JainNo ratings yet
- University of Benghazi: Department of Electrical and Electronics EngineeringDocument12 pagesUniversity of Benghazi: Department of Electrical and Electronics EngineeringAhmed AlhadarNo ratings yet
- Chopper Control DC Drive - 090075mDocument8 pagesChopper Control DC Drive - 090075mIsuru Pasan Dasanayake100% (1)
- Ac ServoDocument38 pagesAc ServoPhạm Hữu KỳNo ratings yet
- Linear ExperimentDocument4 pagesLinear ExperimentJaafar UdinNo ratings yet
- Modul P2Document10 pagesModul P2Wahjue AjhiieNo ratings yet
- Lab 5 ReportDocument12 pagesLab 5 ReportMelaku DinkuNo ratings yet
- EX-602 Control SystemDocument27 pagesEX-602 Control SystemdeepaknayanNo ratings yet
- B106 Rotary Encoder ManualDocument10 pagesB106 Rotary Encoder ManualTan Chin LuhNo ratings yet
- Micro Controller Base Satelite TrackingDocument67 pagesMicro Controller Base Satelite TrackingYuvraj ChaudhariNo ratings yet
- ELEC 5565 - Electric Drives and CTRL LabDocument13 pagesELEC 5565 - Electric Drives and CTRL LabNur Azlin Mohd YusoffNo ratings yet
- Closed Loop Control System (CSL - 04) : Technical Manual FORDocument19 pagesClosed Loop Control System (CSL - 04) : Technical Manual FORAAYUSH KUMARNo ratings yet
- Final ManualDocument27 pagesFinal ManualKameshSontiNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- Control of DC Motor Using Different Control StrategiesFrom EverandControl of DC Motor Using Different Control StrategiesNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- 2019EE30598 Exp1Document8 pages2019EE30598 Exp1SarrahNo ratings yet
- Inorganic Practice Quiz - AnsDocument1 pageInorganic Practice Quiz - AnsSarrahNo ratings yet
- Inorg Assignment 1Document4 pagesInorg Assignment 1SarrahNo ratings yet
- CML-101 Tutorial quiz groups 27, 34, 38, 40Document2 pagesCML-101 Tutorial quiz groups 27, 34, 38, 40SarrahNo ratings yet
- CML101 2020-21 I semester Minor 1 exam factsDocument4 pagesCML101 2020-21 I semester Minor 1 exam factsSarrahNo ratings yet
- Major CML - Reviewed - SubmissionDocument19 pagesMajor CML - Reviewed - SubmissionSarrahNo ratings yet
- Sem Sched IIA 20-21 UGFYDocument2 pagesSem Sched IIA 20-21 UGFYSarrahNo ratings yet
- Prelims AnswersDocument3 pagesPrelims AnswersSarrahNo ratings yet
- Academic and Extracurricular Achievements of Shivam ChawlaDocument2 pagesAcademic and Extracurricular Achievements of Shivam ChawlaSarrahNo ratings yet
- Potpourri 2019Document8 pagesPotpourri 2019SarrahNo ratings yet
- Business AnalysisDocument26 pagesBusiness AnalysisSarrahNo ratings yet
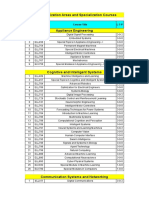
- SE Areas Course ListDocument4 pagesSE Areas Course ListSarrahNo ratings yet
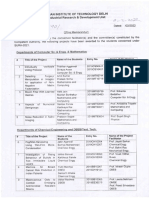
- Indian Institute of Technology Delhi SURA-2021 project titles and studentsDocument4 pagesIndian Institute of Technology Delhi SURA-2021 project titles and studentsSarrahNo ratings yet
- 2020EE OnboardedDocument5 pages2020EE OnboardedSarrahNo ratings yet
- Gazettale'22: - Forsaken by TimeDocument8 pagesGazettale'22: - Forsaken by TimeSarrahNo ratings yet
- Service Manual: ConfidentialDocument105 pagesService Manual: ConfidentialRu80% (5)
- PT.Holcim Indonesia Tbk- Narogong Cement Process Instrumentation and Interlock list for ABC-inlet coolerDocument1 pagePT.Holcim Indonesia Tbk- Narogong Cement Process Instrumentation and Interlock list for ABC-inlet coolerSafrin SangiaNo ratings yet
- 3300 XL 11mm Proximity Transducer System Datasheet - 146256Document25 pages3300 XL 11mm Proximity Transducer System Datasheet - 146256fitasmounirNo ratings yet
- How The Elevator WorksDocument15 pagesHow The Elevator WorksPandaGendutNo ratings yet
- Cargo Gear Inspection and MaintenanceDocument47 pagesCargo Gear Inspection and MaintenanceSamar DasNo ratings yet
- MK8 SVMOD 0002 - PeripheralsDocument48 pagesMK8 SVMOD 0002 - Peripheralswillian eduardo santiago cardenasNo ratings yet
- TeB1 TEB2Document4 pagesTeB1 TEB2Luiz AlmeidaNo ratings yet
- Operation Instructions DZE 4-ModulDocument24 pagesOperation Instructions DZE 4-Moduljose camilo torres dominguezNo ratings yet
- MS-02-427 Tube Cutting ToolDocument2 pagesMS-02-427 Tube Cutting ToolAgustin CesanNo ratings yet
- Chapter 2: PC Assembly: Instructor MaterialsDocument46 pagesChapter 2: PC Assembly: Instructor MaterialsRadot chandra adiputra100% (1)
- Double Quad PIR and Microwave Outdoor Detectors: Product FeaturesDocument1 pageDouble Quad PIR and Microwave Outdoor Detectors: Product FeaturesGustavo AlvarezNo ratings yet
- En 5 3 450 40200 40300Document4 pagesEn 5 3 450 40200 40300anyád baszomNo ratings yet
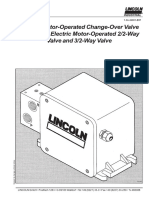
- Em - U2 - LINCOLN Valve Change OverDocument3 pagesEm - U2 - LINCOLN Valve Change OverRobertoNo ratings yet
- Furuno RadarDocument195 pagesFuruno RadarПавел СубботинNo ratings yet
- DYA Series 2018Document22 pagesDYA Series 2018Abo MohammedNo ratings yet
- Installation Manual: Hybrid Bulk Syrup System SSM-80GDocument34 pagesInstallation Manual: Hybrid Bulk Syrup System SSM-80Gprabal rayNo ratings yet
- Sensor Tekanan Dan SuhuDocument4 pagesSensor Tekanan Dan SuhuSudirman LiuNo ratings yet
- Seminar PPT Manisha Gawale (Robotics Motors) - 2Document24 pagesSeminar PPT Manisha Gawale (Robotics Motors) - 2Nehul PatilNo ratings yet
- Spouts MC22 OV Tech SpecDocument5 pagesSpouts MC22 OV Tech SpecHa LinaNo ratings yet
- Performances and Characteristics: JH21-200 SpecificationDocument2 pagesPerformances and Characteristics: JH21-200 SpecificationAlexandreNo ratings yet
- Re95181 2008-07Document2 pagesRe95181 2008-07Irina VarzouNo ratings yet
- PAHInst Manual ADocument16 pagesPAHInst Manual AProingmeca CA100% (1)
- Telephone Exchange: Exchange Is Often Used Synonymously With Central Office, A BellDocument14 pagesTelephone Exchange: Exchange Is Often Used Synonymously With Central Office, A Bellpy thonNo ratings yet
- Factory Automation - Sensing Your Needs: Pmi Inductive Positioning Measuring SystemsDocument8 pagesFactory Automation - Sensing Your Needs: Pmi Inductive Positioning Measuring SystemsticojfsNo ratings yet
- Start Practice Exam Test Questions Part 1 of The SeriesDocument20 pagesStart Practice Exam Test Questions Part 1 of The SeriesJang RosalesNo ratings yet
- WAVE Doble Central Station Air Handler Product ReportDocument20 pagesWAVE Doble Central Station Air Handler Product ReportRodrigo SantosNo ratings yet
- Smoke Detectors For Fire Alarm SystemsDocument11 pagesSmoke Detectors For Fire Alarm SystemsOmar Alfredo Del Castillo QuispeNo ratings yet
- Danfoss FCM300 Quick SetupDocument5 pagesDanfoss FCM300 Quick SetupLuis MorenoNo ratings yet
- ESPglobal To VCI-142 DrawingDocument1 pageESPglobal To VCI-142 DrawingRonald LlerenaNo ratings yet
- Fallarcuna, Elhieza 02 Quiz 1 MITDocument2 pagesFallarcuna, Elhieza 02 Quiz 1 MITELHIEZA FALLARCUNANo ratings yet