You might also like
- Designing Sharp Cut-Off Filters at Very Low FrequenciesDocument12 pagesDesigning Sharp Cut-Off Filters at Very Low Frequencieslizhi0007No ratings yet
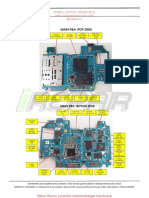
- SM-A102N Manual de Servicio Anibal Garcia IrepaiDocument37 pagesSM-A102N Manual de Servicio Anibal Garcia IrepaiJoaquin Koki Ventura100% (1)
- The Use of Intcrparticle Coordinates in Electronic Energy Calculations For Atoms and MoleculesDocument6 pagesThe Use of Intcrparticle Coordinates in Electronic Energy Calculations For Atoms and Moleculesmanuel.araya.floresNo ratings yet
- Recursive identification algorithms surveyDocument6 pagesRecursive identification algorithms surveynicanor rodolfoNo ratings yet
- Implicit Finite-Difference Simulations of Three-Dimensional Compressible FlowDocument9 pagesImplicit Finite-Difference Simulations of Three-Dimensional Compressible FlowFah MatNo ratings yet
- Model Predictive Control Ofpv-Based Shunt Active Power Filter in Single Phase Low Voltage Grid Using Conservative Power TheoryDocument6 pagesModel Predictive Control Ofpv-Based Shunt Active Power Filter in Single Phase Low Voltage Grid Using Conservative Power TheoryDaniel Palomares GNo ratings yet
- A Curved Finite Element For Thin ElasticDocument38 pagesA Curved Finite Element For Thin ElasticJosé Cléber Rodrigues da SilvaNo ratings yet
- NACA ARR 3I06 Some Analyses of Systematic Experiments On The Resistance and Porpoising Characteristics of Flying-Boat HullsDocument48 pagesNACA ARR 3I06 Some Analyses of Systematic Experiments On The Resistance and Porpoising Characteristics of Flying-Boat HullsMark Evan SalutinNo ratings yet
- Basics of SDOF Dynamics and Dynamic DesignDocument13 pagesBasics of SDOF Dynamics and Dynamic DesignRAHUL NKNo ratings yet
- The Prediction of Instabilities of Linear Differential Equations With Periodic CoefficientsDocument33 pagesThe Prediction of Instabilities of Linear Differential Equations With Periodic CoefficientsSaid SaidNo ratings yet
- Lab4 F12Document8 pagesLab4 F12Anser PashaNo ratings yet
- Capabilities and Limitations of Multirate Control SchemesDocument11 pagesCapabilities and Limitations of Multirate Control SchemesSWATI SINGHNo ratings yet
- Cost Comparison of Low and Medium Voltage Passive Shunt Harmonic FiltersDocument7 pagesCost Comparison of Low and Medium Voltage Passive Shunt Harmonic FiltersRafael FeitosaNo ratings yet
- Aschrafi+Hirsch-Control of Wind-Induced Vibrations of Cable-Stayed Bridges - JEDocument12 pagesAschrafi+Hirsch-Control of Wind-Induced Vibrations of Cable-Stayed Bridges - JEmocker1987No ratings yet
- an accurate computer methodDocument9 pagesan accurate computer methodsoumenNo ratings yet
- A Novel Approach To Determine Static Voltage Stability Limit and Its Improvement Using TCSC and SVCDocument19 pagesA Novel Approach To Determine Static Voltage Stability Limit and Its Improvement Using TCSC and SVCpurify87No ratings yet
- The Recursive Neural Network and Its Applications in Control TheoryDocument9 pagesThe Recursive Neural Network and Its Applications in Control TheoryheryuanoNo ratings yet
- Models For Nonideal Systems 2001Document21 pagesModels For Nonideal Systems 2001chandrakiranNo ratings yet
- Electrical Engineering Paper on Algorithmic Method for Designing Fractional-Slot WindingsDocument8 pagesElectrical Engineering Paper on Algorithmic Method for Designing Fractional-Slot WindingsAdan SolanoNo ratings yet
- Laminar Craya-Curtet Jets: Physics of Fluids December 2003Document6 pagesLaminar Craya-Curtet Jets: Physics of Fluids December 2003pawan sharmaNo ratings yet
- Multiple Couple Circuit Modeling of Induction MachinesDocument8 pagesMultiple Couple Circuit Modeling of Induction MachinesSavin Thusara KokuhennadigeNo ratings yet
- Modeling and Control Design of A Static Synchronous Series CompensatorDocument6 pagesModeling and Control Design of A Static Synchronous Series Compensatorsteffy ruizNo ratings yet
- 1988 Sakaguchi Shinimoto Kuramoto PTPDocument11 pages1988 Sakaguchi Shinimoto Kuramoto PTPSuprotim SahaNo ratings yet
- TP Aero 2021 Inter-Noise Mejdi Va Modeling of Aircraft StructuresDocument9 pagesTP Aero 2021 Inter-Noise Mejdi Va Modeling of Aircraft StructuresatifkhushnoodNo ratings yet
- Circuit Resonances: Small ResistanceDocument8 pagesCircuit Resonances: Small ResistanceEpic WinNo ratings yet
- AAS - 3D - Spirals - Three-Dimensional Generalized Logarithmic SpiralsDocument21 pagesAAS - 3D - Spirals - Three-Dimensional Generalized Logarithmic Spiralsjohn_k7408No ratings yet
- Influence of Distributed and Localized I PDFDocument25 pagesInfluence of Distributed and Localized I PDFMuhammad ZiaNo ratings yet
- Cossu 2000Document15 pagesCossu 2000HVR MittalNo ratings yet
- Advances in Vector Control Ofac Motor Drives A Review PDFDocument24 pagesAdvances in Vector Control Ofac Motor Drives A Review PDFBook4AllNo ratings yet
- Numerical Methods for Nonlinear Dynamic SystemsDocument9 pagesNumerical Methods for Nonlinear Dynamic SystemsC SzetoNo ratings yet
- Quadrupole MomentsDocument5 pagesQuadrupole MomentsFernando JarixNo ratings yet
- Theory of Memristive Controllers: Design and Stability Analysis For Linear PlantsDocument9 pagesTheory of Memristive Controllers: Design and Stability Analysis For Linear PlantsVijyan MahajanNo ratings yet
- State-Plane Approach for Analyzing Frequency Response of Resonant ConvertersDocument7 pagesState-Plane Approach for Analyzing Frequency Response of Resonant ConvertersAbd Ur RehmanNo ratings yet
- Pearson 1976Document11 pagesPearson 1976anakkuliahanNo ratings yet
- B. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsDocument8 pagesB. Franken G. Anderson 1990 Analysis of HVDV Converters Connected To Weak Ac SystemsFelix GamarraNo ratings yet
- E.o.aa: at False. To Is (BL (C) Is Rlcre ThanDocument3 pagesE.o.aa: at False. To Is (BL (C) Is Rlcre ThanSachin ShresthaNo ratings yet
- Helical Flow of Power-Law Fluids: Dostal, Zitnf, and J. SestakDocument4 pagesHelical Flow of Power-Law Fluids: Dostal, Zitnf, and J. SestakHicham HichamNo ratings yet
- Nonlinear Control of Induction Motor: Z. KrzeminskiDocument6 pagesNonlinear Control of Induction Motor: Z. KrzeminskiWs KenheiNo ratings yet
- Miet 2394 CFD Lecture 7Document33 pagesMiet 2394 CFD Lecture 7cepong89No ratings yet
- Seismic Reliability Analysis of Large Electric Power SystemsDocument5 pagesSeismic Reliability Analysis of Large Electric Power SystemsMaikol AlexanderNo ratings yet
- Characterization of The Regular Polygonal WaveguidDocument12 pagesCharacterization of The Regular Polygonal WaveguidStefanut Zavarache BanicaNo ratings yet
- Graph Prog ApplicationDocument12 pagesGraph Prog ApplicationAadarsh GuptaNo ratings yet
- Bridge Strudl - Manual: Proper IesDocument30 pagesBridge Strudl - Manual: Proper IesAbera DeressaNo ratings yet
- SPE 39931 (1998) Production Analysis of Linear Flow Into Fractured Tight Gas WellsDocument12 pagesSPE 39931 (1998) Production Analysis of Linear Flow Into Fractured Tight Gas WellsEric RodriguesNo ratings yet
- Quantum Chaotic Dynamics and Random Polynomials: E. B o G o M o L N Y, I O. Bohigas, and P. LeboeufDocument41 pagesQuantum Chaotic Dynamics and Random Polynomials: E. B o G o M o L N Y, I O. Bohigas, and P. Leboeufantonio ScacchiNo ratings yet
- AC Circuit Analysis - Alexander SchureDocument100 pagesAC Circuit Analysis - Alexander SchureDr. Gollapalli Naresh100% (1)
- A-C Circuit Analysis - Alexander SchureDocument100 pagesA-C Circuit Analysis - Alexander SchureFranciscoCampoverdeNo ratings yet
- Comsol Command EmwDocument21 pagesComsol Command EmwcontactsitaNo ratings yet
- Jour 92Document16 pagesJour 92omar nasserNo ratings yet
- (Received 20 July 1999 Accepted For 9 December 1999) : 0093-6413 0t$ - T Mater P L L: I 3 (N) N O ? 8 - 1Document8 pages(Received 20 July 1999 Accepted For 9 December 1999) : 0093-6413 0t$ - T Mater P L L: I 3 (N) N O ? 8 - 1Leonardo LagoNo ratings yet
- Get TRDocDocument60 pagesGet TRDocanshuman.kgp5267No ratings yet
- Mineral Liberation and The Batch Comminution EquationDocument18 pagesMineral Liberation and The Batch Comminution EquationTiago PintoNo ratings yet
- A Generalized Flow Prediction Method For The Unsteady Flow Generated by A Train in A Single-Track TunnelDocument30 pagesA Generalized Flow Prediction Method For The Unsteady Flow Generated by A Train in A Single-Track TunnelMOHAMMED ABDULLA MOHAMMEDNo ratings yet
- Advances_in_the_Optimization_and_Form_fiDocument25 pagesAdvances_in_the_Optimization_and_Form_fiRuturaj JadhavNo ratings yet
- A Linear Kronig-Kramers Transform Test for Validating Immittance DataDocument11 pagesA Linear Kronig-Kramers Transform Test for Validating Immittance DatatrieshaNo ratings yet
- Qiang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012148Document8 pagesQiang - 2017 - IOP - Conf. - Ser. - Mater. - Sci. - Eng. - 199 - 012148DRIS IDRISNo ratings yet
- Control Design and Dynamic Performance Analysis of A Wind TurbinDocument5 pagesControl Design and Dynamic Performance Analysis of A Wind TurbinMdzayd EL FahimeNo ratings yet
- L-lIT-21EEE Date: 29/06/2015: V (100sin (wt+300) - 50sin (3wt+600) +30cos5wt)Document16 pagesL-lIT-21EEE Date: 29/06/2015: V (100sin (wt+300) - 50sin (3wt+600) +30cos5wt)MahmudNo ratings yet
- Trifilar PendDocument7 pagesTrifilar PendPranav RaveendranNo ratings yet
- Gluing Nekrasov Partition Functions: Jian Qiu, Luigi Tizzano, Jacob Winding and Maxim ZabzineDocument39 pagesGluing Nekrasov Partition Functions: Jian Qiu, Luigi Tizzano, Jacob Winding and Maxim ZabzineJack Ignacio NahmíasNo ratings yet
- Iv2014 6Document6 pagesIv2014 6oussama sadkiNo ratings yet
- Front Matter and IndexDocument21 pagesFront Matter and Indexoussama sadkiNo ratings yet
- Appendix ADocument1 pageAppendix Aoussama sadkiNo ratings yet
- Modeling and Backstepping-Based Nonlinear ControlDocument9 pagesModeling and Backstepping-Based Nonlinear Controloussama sadkiNo ratings yet
- The Squareroot Unscented Kalman Filter For State and Parameteres PDFDocument4 pagesThe Squareroot Unscented Kalman Filter For State and Parameteres PDFThafer MajeedNo ratings yet
- Free-chattering Sliding Mode Control Estimates Quadrotor DynamicsDocument17 pagesFree-chattering Sliding Mode Control Estimates Quadrotor Dynamicsoussama sadkiNo ratings yet
- JudaZ PowerEfficiencyManagementDocument9 pagesJudaZ PowerEfficiencyManagementoussama sadkiNo ratings yet
- State-space model of grid-connected inverters under current controlDocument10 pagesState-space model of grid-connected inverters under current controloussama sadkiNo ratings yet
- Techniques For Quadcopter Modelling & Design: A Review: ArticleDocument11 pagesTechniques For Quadcopter Modelling & Design: A Review: Articlenguyễn namNo ratings yet
- Chapter2a SmithDocument19 pagesChapter2a SmithGilang DeathMetal SquadNo ratings yet
- Backstepping Controlof DroneDocument10 pagesBackstepping Controlof Droneoussama sadkiNo ratings yet
- Modeling and Backstepping-Based Nonlinear ControlDocument9 pagesModeling and Backstepping-Based Nonlinear Controloussama sadkiNo ratings yet
- SMC A SurveyDocument57 pagesSMC A Surveyoussama sadkiNo ratings yet
- State Feedback Control of DC-DC Converter Using LQR Integral Controller and Kalman Filter ObserverDocument1 pageState Feedback Control of DC-DC Converter Using LQR Integral Controller and Kalman Filter Observeroussama sadkiNo ratings yet
- For Dan 2Document7 pagesFor Dan 2oussama sadkiNo ratings yet
- Adaptive Backstepping Flight Control for Mini-UAVDocument18 pagesAdaptive Backstepping Flight Control for Mini-UAVoussama sadkiNo ratings yet
- Gowtham ICCPCTDocument7 pagesGowtham ICCPCToussama sadkiNo ratings yet
- Bibliography Subject List 2022Document1 pageBibliography Subject List 2022oussama sadkiNo ratings yet
- Final ProjectDocument2 pagesFinal Projectoussama sadkiNo ratings yet
- MocksolutionDocument8 pagesMocksolutionoussama sadkiNo ratings yet
- Master's Degree in Automatic Control and Robotics (ETSEIB)Document4 pagesMaster's Degree in Automatic Control and Robotics (ETSEIB)oussama sadkiNo ratings yet
- ExerciceDocument1 pageExerciceoussama sadkiNo ratings yet
- GE Renewable Energy, 2017Document3 pagesGE Renewable Energy, 2017oussama sadkiNo ratings yet
- Homework PresentationDocument31 pagesHomework Presentationoussama sadkiNo ratings yet
- PowerConverters Chapter1 2022Document29 pagesPowerConverters Chapter1 2022oussama sadkiNo ratings yet
- Work ProjectDocument2 pagesWork Projectoussama sadkiNo ratings yet
- Phase Dectector TaskDocument1 pagePhase Dectector Taskoussama sadkiNo ratings yet
- Engproc 14 00004Document9 pagesEngproc 14 00004oussama sadkiNo ratings yet
- 10.3934 Energy.2019.2.186Document25 pages10.3934 Energy.2019.2.186oussama sadkiNo ratings yet
- Katalog Ag-700 To Ag-800Document1 pageKatalog Ag-700 To Ag-800Iqbal AbugindaNo ratings yet
- UKPSC JE Civil 2024 Exam (Technical) - ScheduleDocument4 pagesUKPSC JE Civil 2024 Exam (Technical) - ScheduleIES-GATEWizNo ratings yet
- Toshiba SMMS-7 VRF CatalogueDocument106 pagesToshiba SMMS-7 VRF CatalogueMyo Sein67% (3)
- Bridge Superstructure DesignDocument276 pagesBridge Superstructure Designrenzo wilber bernedo beltranNo ratings yet
- 1.finite Impulse Response (FIR) FiltersDocument16 pages1.finite Impulse Response (FIR) FiltersSamet YılmazNo ratings yet
- Nguyen Et Al. - 2015 - Screening The Optimal Ratio of Symbiosis Between Isolated Yeast and Acetic Acid Bacteria Strain From Traditional-AnnotatedDocument25 pagesNguyen Et Al. - 2015 - Screening The Optimal Ratio of Symbiosis Between Isolated Yeast and Acetic Acid Bacteria Strain From Traditional-AnnotatedKim NgânNo ratings yet
- Unleashing Learner PowerDocument188 pagesUnleashing Learner PowerEka MeilinaNo ratings yet
- Ds 311 2 General Pre-Start Check List (B)Document4 pagesDs 311 2 General Pre-Start Check List (B)Miguel RomoNo ratings yet
- Study of NanofibresDocument237 pagesStudy of NanofibresGerardo ZambranoNo ratings yet
- Media Shout 2.0 User GuideDocument106 pagesMedia Shout 2.0 User GuideGlenn MartinNo ratings yet
- Pytania Do Obrony Spoza Pracy Dyplomowej Filologia Angielska Studia I StopniaDocument5 pagesPytania Do Obrony Spoza Pracy Dyplomowej Filologia Angielska Studia I StopniabartNo ratings yet
- Sem 656DDocument1 pageSem 656DCarlos Arturo AcevedoNo ratings yet
- 1 s2.0 S1877042816311582 MainDocument8 pages1 s2.0 S1877042816311582 MainAilyn rodilNo ratings yet
- Cultural Dimensions & EthnocentrismDocument38 pagesCultural Dimensions & EthnocentrismKatya Alexis SalitaNo ratings yet
- Standards and Their ClassificationsDocument3 pagesStandards and Their ClassificationsJoecelle AbleginaNo ratings yet
- The Origins Development and Possible Decline of The Modern StateDocument65 pagesThe Origins Development and Possible Decline of The Modern StateJasper Jade MartinNo ratings yet
- 65-1501 Victor Reguladores FlujometrosDocument7 pages65-1501 Victor Reguladores FlujometroscarlosNo ratings yet
- Buck 1948Document9 pagesBuck 1948Carlos Mora100% (1)
- Nfrc100a 2010Document49 pagesNfrc100a 2010Amy ShepardNo ratings yet
- Monika Soni PDFDocument16 pagesMonika Soni PDFdeepak guptaNo ratings yet
- B. Glo Bal Maxima/MinimaDocument15 pagesB. Glo Bal Maxima/MinimalucasNo ratings yet
- 2GIG ZWave CT30e Thermostat Installation GuideDocument19 pages2GIG ZWave CT30e Thermostat Installation Guideyamimaker2002No ratings yet
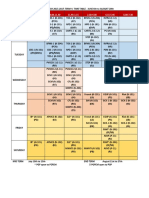
- Term 4 Time Table & Exam Schedule.Document4 pagesTerm 4 Time Table & Exam Schedule.Anonymous FD3MCd89ZNo ratings yet
- X20 System-ENG - V3.50 PDFDocument3,410 pagesX20 System-ENG - V3.50 PDFAbdelrahmanJamal100% (1)
- UNIT-I Problems (PSE EEE)Document6 pagesUNIT-I Problems (PSE EEE)Aditya JhaNo ratings yet
- Geotechnical Scope of Work For ERL Unit-2Document75 pagesGeotechnical Scope of Work For ERL Unit-2smjohirNo ratings yet
- DE Monthly Assessment - IDocument5 pagesDE Monthly Assessment - IJay KakadiyaNo ratings yet
- Cost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesDocument13 pagesCost-Time-Resource Sheet for Rumaila Oil Field Engineering ServicesonlyikramNo ratings yet
- Practical Research 2: Quarter 1 - Module 1Document35 pagesPractical Research 2: Quarter 1 - Module 1Alvin Sinel Belejerdo90% (10)