You might also like
- Final Exam Formula SheetDocument3 pagesFinal Exam Formula Sheetjanaka100% (1)
- Easy(er) Electrical Principles for Extra Class Ham License (2012-2016)From EverandEasy(er) Electrical Principles for Extra Class Ham License (2012-2016)No ratings yet
- Lesson 6 11midtermDocument28 pagesLesson 6 11midtermREIMOND VINCE MENDOZANo ratings yet
- Electronics 3 Checkbook: The Checkbooks SeriesFrom EverandElectronics 3 Checkbook: The Checkbooks SeriesRating: 5 out of 5 stars5/5 (1)
- Flexi Network Gateway Rel. 2.1 2.0, Operating Documentation, v2Document38 pagesFlexi Network Gateway Rel. 2.1 2.0, Operating Documentation, v2Yassine LASRINo ratings yet
- Create A Simple ABAP CDS View in ADTDocument71 pagesCreate A Simple ABAP CDS View in ADTAmit KumarNo ratings yet
- Clase 12 - AdcDocument57 pagesClase 12 - AdccamilaNo ratings yet
- Gain & Phase Margin - Bode PlotDocument28 pagesGain & Phase Margin - Bode PlotDeepthiNo ratings yet
- 3 - AM and Related ModulationsDocument31 pages3 - AM and Related ModulationsTingyang YUNo ratings yet
- Digital FiltersDocument83 pagesDigital FiltersNhựt Tiến Nguyễn BạchNo ratings yet
- Module04 RandomizedCompleteBlockDesignDocument28 pagesModule04 RandomizedCompleteBlockDesignasdfNo ratings yet
- Adaptive Noise Cancelling in HeadsetsDocument8 pagesAdaptive Noise Cancelling in HeadsetsAmirNo ratings yet
- Lab 1 ProcedureDocument8 pagesLab 1 Proceduregastelumii.juanNo ratings yet
- Signal Conditioning SystemsDocument20 pagesSignal Conditioning SystemsTeenaNo ratings yet
- Operational Amplifiers - Aula 4Document27 pagesOperational Amplifiers - Aula 4Willian Cezar de Lima PintoNo ratings yet
- Lec 7Document21 pagesLec 7rr1974aaNo ratings yet
- Signaling Over Bandlimited Channels Oct 30 Nov 2 6Document39 pagesSignaling Over Bandlimited Channels Oct 30 Nov 2 6Shravani KodeNo ratings yet
- Ch02 WienerFilters Lect 04Document51 pagesCh02 WienerFilters Lect 04DrIhsan Ul HaqNo ratings yet
- Ece113 Lec03 Nonlinear DistortionDocument37 pagesEce113 Lec03 Nonlinear Distortion許耕立No ratings yet
- Digital Communications: Analog Vs Digital Communication Pulse Code Modulation (PCM) QuantizationDocument20 pagesDigital Communications: Analog Vs Digital Communication Pulse Code Modulation (PCM) QuantizationRiya SinghNo ratings yet
- Session 21 - Modulation (I)Document24 pagesSession 21 - Modulation (I)Daniela GiraldoNo ratings yet
- Filters 2Document60 pagesFilters 2Nguyễn Hoàng KhaNo ratings yet
- Electronic Project CWDocument18 pagesElectronic Project CWssyxz10No ratings yet
- Communication Systems I: Dr. N. M. EltayebDocument115 pagesCommunication Systems I: Dr. N. M. EltayebAwe HughNo ratings yet
- Unit IDocument131 pagesUnit IpruNo ratings yet
- Adaptive Filters DFEDocument25 pagesAdaptive Filters DFEPraptiNo ratings yet
- An Introduction To Adaptive Filtering & It's Applications: Asst - Prof.Dr - Thamer M.JamelDocument81 pagesAn Introduction To Adaptive Filtering & It's Applications: Asst - Prof.Dr - Thamer M.JamelRathva brijesh r.No ratings yet
- Industrial InstrumentationDocument24 pagesIndustrial InstrumentationNhân Phạm ĐìnhNo ratings yet
- Digital Control System ModellingDocument28 pagesDigital Control System ModellingSonam AlviNo ratings yet
- Cps 213 Chapter 4Document43 pagesCps 213 Chapter 4Krish Gopi KondetiNo ratings yet
- Week 3Document38 pagesWeek 3Raising StarNo ratings yet
- Summary of Link Power DesignDocument2 pagesSummary of Link Power DesignabdishNo ratings yet
- Switch Mode RegulatorsDocument32 pagesSwitch Mode RegulatorsAbdullah NasirNo ratings yet
- AC-AC Controllers: EE307 - Power Electronics Spring 2019Document22 pagesAC-AC Controllers: EE307 - Power Electronics Spring 2019Abdullah NasirNo ratings yet
- Ece113 Lec02 Noise in Electronic SystemsDocument29 pagesEce113 Lec02 Noise in Electronic Systems許耕立No ratings yet
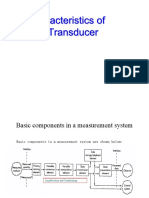
- Characteristic of TransducerDocument40 pagesCharacteristic of Transducergkarthikeyan50% (2)
- LKNLBK 4 TNNDocument19 pagesLKNLBK 4 TNNbilkheer driveNo ratings yet
- USTH Algorithm AnalysisDocument78 pagesUSTH Algorithm Analysisnhng2421No ratings yet
- LogicDocument100 pagesLogicaktherrameezNo ratings yet
- Project Adaptive Filter Theory: SANA HASSAN 19-1603 AwaisDocument12 pagesProject Adaptive Filter Theory: SANA HASSAN 19-1603 AwaisSana SaadNo ratings yet
- Problem Set 02 Analog To Digital ConversionDocument2 pagesProblem Set 02 Analog To Digital ConversionBryan CarloNo ratings yet
- Bkb21103 CA PBLDocument7 pagesBkb21103 CA PBLAmer Mahmoud Bin AhmedNo ratings yet
- S&S Lab1-13 PDFDocument49 pagesS&S Lab1-13 PDFfaizaNo ratings yet
- ENTC 3320: Active FiltersDocument60 pagesENTC 3320: Active FiltersAbdullah NisarNo ratings yet
- Project2 2010Document4 pagesProject2 2010Omar NasrNo ratings yet
- Signaling Over AWGN Channels Oct 9-10-16 17Document47 pagesSignaling Over AWGN Channels Oct 9-10-16 17Shravani KodeNo ratings yet
- Systems Approach Logarithms and DecibelsDocument23 pagesSystems Approach Logarithms and DecibelsEL DrickNo ratings yet
- Mehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Document34 pagesMehta Vidhi (4102) Mistry Nitisha (4105) Patel Dhruvi (4118)Himani LokhandeNo ratings yet
- Chapter 3Document45 pagesChapter 3Tuấn NguyễnNo ratings yet
- ECE 343 - Lab 3 PDFDocument16 pagesECE 343 - Lab 3 PDFfdakjfdsljkNo ratings yet
- Chapter 12 Bode PlotsDocument39 pagesChapter 12 Bode PlotsMayar Magdy MorkosNo ratings yet
- MATLAB BasicDocument25 pagesMATLAB BasicAalu YadavNo ratings yet
- Do Luong Cong Nghiep (Chuong 5)Document11 pagesDo Luong Cong Nghiep (Chuong 5)Nguyễn Xuân DươngNo ratings yet
- Dual Slope ADC and Sigma DeltaDocument4 pagesDual Slope ADC and Sigma DeltaWaleed EldsokyNo ratings yet
- Ece113 Lec07 FiltersDocument64 pagesEce113 Lec07 Filters許耕立No ratings yet
- Amplifier Frequency Response: 1. General ConceptsDocument15 pagesAmplifier Frequency Response: 1. General ConceptsAmr Ayman awad ali 1179No ratings yet
- (B. P. Lathi) Modern Digital and Analog CommunicatDocument28 pages(B. P. Lathi) Modern Digital and Analog CommunicatSalva HasanNo ratings yet
- 3-Differential Circuit AmplifiersDocument13 pages3-Differential Circuit AmplifiersPrince KratosNo ratings yet
- 01 Introduction To Analog ElectronicsDocument14 pages01 Introduction To Analog ElectronicsChandrajeet SinghNo ratings yet
- 04 AM CalculationsDocument30 pages04 AM CalculationsVILLASECA, EDWARDNo ratings yet
- Lecture 11 FIR FIlter With WindowingDocument24 pagesLecture 11 FIR FIlter With WindowingAria AmadeusNo ratings yet
- Chapter 5Document44 pagesChapter 5shwethaNo ratings yet
- Iv2014 6Document6 pagesIv2014 6oussama sadkiNo ratings yet
- Appendix ADocument1 pageAppendix Aoussama sadkiNo ratings yet
- Front Matter and IndexDocument21 pagesFront Matter and Indexoussama sadkiNo ratings yet
- SMC A SurveyDocument57 pagesSMC A Surveyoussama sadkiNo ratings yet
- ThirdpaperDocument17 pagesThirdpaperoussama sadkiNo ratings yet
- JudaZ PowerEfficiencyManagementDocument9 pagesJudaZ PowerEfficiencyManagementoussama sadkiNo ratings yet
- State Space Model of Grid Connected Inverters Under Current Control ModeDocument10 pagesState Space Model of Grid Connected Inverters Under Current Control Modeoussama sadkiNo ratings yet
- MocksolutionDocument8 pagesMocksolutionoussama sadkiNo ratings yet
- Abstract 2640Document1 pageAbstract 2640oussama sadkiNo ratings yet
- Homework PresentationDocument31 pagesHomework Presentationoussama sadkiNo ratings yet
- GE Renewable Energy, 2017Document3 pagesGE Renewable Energy, 2017oussama sadkiNo ratings yet
- Adaptive Backstepping Ight Control For A mini-UAVDocument18 pagesAdaptive Backstepping Ight Control For A mini-UAVoussama sadkiNo ratings yet
- Gowtham ICCPCTDocument7 pagesGowtham ICCPCToussama sadkiNo ratings yet
- Final ProjectDocument2 pagesFinal Projectoussama sadkiNo ratings yet
- The Internal Model Principle of Control Theory: Automatica September 1976Document10 pagesThe Internal Model Principle of Control Theory: Automatica September 1976oussama sadkiNo ratings yet
- ExerciceDocument1 pageExerciceoussama sadkiNo ratings yet
- PowerConverters Chapter1 2022Document29 pagesPowerConverters Chapter1 2022oussama sadkiNo ratings yet
- Bibliography Subject List 2022Document1 pageBibliography Subject List 2022oussama sadkiNo ratings yet
- Master's Degree in Automatic Control and Robotics (ETSEIB)Document4 pagesMaster's Degree in Automatic Control and Robotics (ETSEIB)oussama sadkiNo ratings yet
- Modeling and Backstepping-Based Nonlinear ControlDocument9 pagesModeling and Backstepping-Based Nonlinear Controloussama sadkiNo ratings yet
- World Journal of Engineering Research and Technology WjertDocument15 pagesWorld Journal of Engineering Research and Technology Wjertoussama sadkiNo ratings yet
- Engproc 14 00004Document9 pagesEngproc 14 00004oussama sadkiNo ratings yet
- Online Retailers PackageDocument12 pagesOnline Retailers Packageoussama sadkiNo ratings yet
- Cw1 (Part1) BriefDocument3 pagesCw1 (Part1) Briefoussama sadkiNo ratings yet
- 10.3934 Energy.2019.2.186Document25 pages10.3934 Energy.2019.2.186oussama sadkiNo ratings yet
- Estimation of Lithium Ion Battery Model Parameters Using Experimental DataDocument7 pagesEstimation of Lithium Ion Battery Model Parameters Using Experimental Dataoussama sadkiNo ratings yet
- Giving Your Opinion Agreeing / DisagreeingDocument1 pageGiving Your Opinion Agreeing / Disagreeingoussama sadkiNo ratings yet
- School Supplies Checklist - Grades 5-12Document1 pageSchool Supplies Checklist - Grades 5-12Kate the 5thNo ratings yet
- CMS Base II - Monetary Transaction ProcessingDocument41 pagesCMS Base II - Monetary Transaction ProcessingvaradhanrgNo ratings yet
- Install LogDocument5 pagesInstall Logjohn-alexander-gonzalez-ramirez-673No ratings yet
- ATG ProGaugeDocument4 pagesATG ProGaugewarung1bensin100% (1)
- FPGA Adaptive Beamforming With HDL Coder and Zynq RFSoCDocument36 pagesFPGA Adaptive Beamforming With HDL Coder and Zynq RFSoCMatlab IEEENo ratings yet
- UntitledDocument3 pagesUntitledGuicella AlmendarezNo ratings yet
- PowerFactory2023 Highlights enDocument2 pagesPowerFactory2023 Highlights enHubert Maraza JaliriNo ratings yet
- TC5X Configuration & Accessories GuideDocument17 pagesTC5X Configuration & Accessories GuideYesica SantamariaNo ratings yet
- 06 Tda Medix90 01Document9 pages06 Tda Medix90 01Sulehri EntertainmentNo ratings yet
- JournalDev - How To Replace Values Using REPLACE in RDocument6 pagesJournalDev - How To Replace Values Using REPLACE in RSílvia AmadoriNo ratings yet
- Bloom's Taxonomy Based Approach To Learn Basic Programming LoopsDocument5 pagesBloom's Taxonomy Based Approach To Learn Basic Programming LoopsFelipe Alberto Reyes GonzálezNo ratings yet
- Literatures CitedDocument4 pagesLiteratures CitedCyrus CorpuzNo ratings yet
- Two Sided MaterialDocument3 pagesTwo Sided Materialreza fachrul rozyNo ratings yet
- Working With Functions Sumita Arora MCQDocument7 pagesWorking With Functions Sumita Arora MCQpokim55438100% (1)
- 01 Worksheet 14Document3 pages01 Worksheet 14jianjosh123No ratings yet
- 4 Hybris Install PDFDocument10 pages4 Hybris Install PDFravikanchuNo ratings yet
- ACFrOgBgV9b3OQwHOeMMByhvG KzdFH5nkFJJ7QqTu6tVeq8qirf3Z8gLhUiCxOaLfsBXOj9PJnL6q4kRUyfrwbyMt6ncGD1w OVP2Bi4inLpC1Z8b1ACGTbQRKUCXIvWf9On - g4VVCJNmOA8KuDocument12 pagesACFrOgBgV9b3OQwHOeMMByhvG KzdFH5nkFJJ7QqTu6tVeq8qirf3Z8gLhUiCxOaLfsBXOj9PJnL6q4kRUyfrwbyMt6ncGD1w OVP2Bi4inLpC1Z8b1ACGTbQRKUCXIvWf9On - g4VVCJNmOA8KuShree DhanaNo ratings yet
- Iptv-Unicast and MulticastDocument21 pagesIptv-Unicast and Multicastramnik_mota0% (1)
- Solid State Wind Sensor: Met One Instruments, IncDocument2 pagesSolid State Wind Sensor: Met One Instruments, IncGilmar RibeiroNo ratings yet
- Fix Windows 7 "USB Device Not Recognized" ErrorDocument2 pagesFix Windows 7 "USB Device Not Recognized" ErrorshemksNo ratings yet
- 0019 Microsoft Powerpoint 2003 PDFDocument69 pages0019 Microsoft Powerpoint 2003 PDFEjaz AhmadNo ratings yet
- Questionary SurveyDocument2 pagesQuestionary SurveyGERALDEZ DEXTERNo ratings yet
- Fahad 2017Document5 pagesFahad 2017Muhammad FahadNo ratings yet
- Chap5 - Conditional Statements in MATLABDocument12 pagesChap5 - Conditional Statements in MATLABcoppernitrateNo ratings yet
- 04 RecursionDocument21 pages04 RecursionRazan AbabNo ratings yet
- SKT200-250TT Series SpecificationDocument8 pagesSKT200-250TT Series SpecificationcoronaqcNo ratings yet
- Webdesigning Interview QuestionsDocument115 pagesWebdesigning Interview QuestionsDharmraj Dilip BhiseNo ratings yet