You might also like
- Power Skiving PDFDocument11 pagesPower Skiving PDFmadhavikNo ratings yet
- Jig and FixtureDocument24 pagesJig and FixtureprabhjotbhangalNo ratings yet
- ABB Distribution Transformer CatalogueDocument51 pagesABB Distribution Transformer CatalogueNgocTien BuiNo ratings yet
- OPP - Power Cable Seminar - (August 21, 2010) - FINALDocument108 pagesOPP - Power Cable Seminar - (August 21, 2010) - FINALJheny B. Bayon100% (2)
- Jig and FixturesDocument38 pagesJig and FixturesrajatjainkkjNo ratings yet
- Electrical Work SpecsDocument33 pagesElectrical Work SpecsusmanaliNo ratings yet
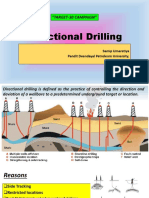
- Directional DrillingDocument29 pagesDirectional DrillingAkashShuklaNo ratings yet
- Siemens VCBDocument64 pagesSiemens VCBInayat HathiariNo ratings yet
- Ch-23 Jig and FixturesDocument51 pagesCh-23 Jig and FixturesrajaNo ratings yet
- Work Method of Stringing ConductorsDocument5 pagesWork Method of Stringing ConductorsJatmiko Purwo Saputro50% (2)
- Reviewer For RME-PEC ExamDocument76 pagesReviewer For RME-PEC ExamKaye Freyssinet Nermal Abanggan100% (5)
- A Brief Introduction To The Measurement of Roundness and Spindle Error SeparationDocument12 pagesA Brief Introduction To The Measurement of Roundness and Spindle Error SeparationaralvoiNo ratings yet
- Iec60060-1 (Ed2.0) en D.img PDFDocument8 pagesIec60060-1 (Ed2.0) en D.img PDFBuyankhishig MonkhbaatarNo ratings yet
- MCQ's On Electrical and Eletronic Engineering (EEE)Document434 pagesMCQ's On Electrical and Eletronic Engineering (EEE)NSunnyJoyNo ratings yet
- 3-2-1 Principle Used For Jig and Fixture Locating MethodDocument3 pages3-2-1 Principle Used For Jig and Fixture Locating MethodrlwersalNo ratings yet
- CAD Lab ManualDocument45 pagesCAD Lab ManualAmul KumarNo ratings yet
- What Is 5 Axis CNC MachiningDocument10 pagesWhat Is 5 Axis CNC MachiningSuhail Abrol100% (1)
- JigDocument13 pagesJigJunaid YNo ratings yet
- Testing and CommissioningDocument7 pagesTesting and CommissioningHussain ElboshyNo ratings yet
- C2005 Traverse SurveyDocument11 pagesC2005 Traverse SurveyhjwNo ratings yet
- EMTP RV ModellingDocument20 pagesEMTP RV ModellingCinar InalNo ratings yet
- Power Frequency Withstand Voltage For System Upto 660V Table 14.3Document1 pagePower Frequency Withstand Voltage For System Upto 660V Table 14.3Vel MuruganNo ratings yet
- Advance Manufacturing Lab - MME 191Document19 pagesAdvance Manufacturing Lab - MME 191Rajib GhoraiNo ratings yet
- Surface Swept by A Toroidal Cutter During 5-Axis MachiningDocument10 pagesSurface Swept by A Toroidal Cutter During 5-Axis MachiningJulen MartinezNo ratings yet
- CG-module 4 NotesDocument21 pagesCG-module 4 NotesRajeswari RNo ratings yet
- Research On Cylindrical Indexing Cam's Unilateral Machining: Junhua Chen, Xiaowei Mu, Xuze Zhang and Chuhua JiangDocument9 pagesResearch On Cylindrical Indexing Cam's Unilateral Machining: Junhua Chen, Xiaowei Mu, Xuze Zhang and Chuhua JiangAnonymous rvGgpvvqNo ratings yet
- Unit III NewDocument21 pagesUnit III NewsathiaNo ratings yet
- 15me62t U4 SyDocument6 pages15me62t U4 SySeema PintoNo ratings yet
- Computer Graphics: Unit 3 Overview of TransformationsDocument85 pagesComputer Graphics: Unit 3 Overview of TransformationsKamini SalunkheNo ratings yet
- PLATE 5 Week5Document17 pagesPLATE 5 Week5Esona Rachelyn P.No ratings yet
- Location and Locating DevicesDocument79 pagesLocation and Locating DevicesRajyalakshmiNo ratings yet
- On SweepDocument22 pagesOn SweepPraveen CoolNo ratings yet
- Computer Graphics Unit Iv 351 CS 63Document14 pagesComputer Graphics Unit Iv 351 CS 63Thumbiko MkandawireNo ratings yet
- Jig ManufacturingDocument13 pagesJig ManufacturingAnurag JoshiNo ratings yet
- Engineering Mechanics Unit-5Document31 pagesEngineering Mechanics Unit-5ZeeshanNo ratings yet
- Metrology: BY A.Radha Krishna, Hod, Dept. of Mech. MietDocument28 pagesMetrology: BY A.Radha Krishna, Hod, Dept. of Mech. MietRadha KrishnaNo ratings yet
- Report For LEGO Mindstorms Maze RobotDocument15 pagesReport For LEGO Mindstorms Maze RobotSiddhant ModiNo ratings yet
- Unit 2 (2D&3D Transformation)Document65 pagesUnit 2 (2D&3D Transformation)Shruti KuradeNo ratings yet
- 8 MDLDocument100 pages8 MDLzerihun samuelNo ratings yet
- Engineering Journal To Experimental Study For Comparison Theodolite and Total StationDocument8 pagesEngineering Journal To Experimental Study For Comparison Theodolite and Total StationEngineering JournalNo ratings yet
- Tutorial 1Document16 pagesTutorial 1fonsecariNo ratings yet
- Tool Makers MicroscopeDocument2 pagesTool Makers Microscopesukriti dhauni100% (1)
- Manual MM PrintFinalDocument34 pagesManual MM PrintFinalharshNo ratings yet
- Locating Principle and LocatorsDocument35 pagesLocating Principle and LocatorsPes Mobile100% (1)
- Cisp 2011 6100646Document4 pagesCisp 2011 6100646Anish ShahNo ratings yet
- Jigs and FixturesDocument19 pagesJigs and FixturesSrimanthula SrikanthNo ratings yet
- Qualitative Vision-Based Mobile Robot Navigation: Zhichao Chen and Stanley T. BirchfieldDocument7 pagesQualitative Vision-Based Mobile Robot Navigation: Zhichao Chen and Stanley T. BirchfieldJulierme SilvaNo ratings yet
- Numerical Control Machines-Notes-Kundra Rao & Tewari by AdityaDocument21 pagesNumerical Control Machines-Notes-Kundra Rao & Tewari by AdityaAditya Singh100% (2)
- Unit - 5 Three Dimensional Transformations Three-Dimensional Display MethodsDocument7 pagesUnit - 5 Three Dimensional Transformations Three-Dimensional Display MethodsprincejiNo ratings yet
- MCTD VivaDocument4 pagesMCTD VivaAshish Kumar SahuNo ratings yet
- U1 AxesDocument18 pagesU1 AxesGaurav SharmaNo ratings yet
- On-Line Rotation Invariant Estimation and RecognitionDocument10 pagesOn-Line Rotation Invariant Estimation and RecognitionEditor IJACSANo ratings yet
- Combined Note SurveyDocument104 pagesCombined Note SurveySaketSinghNo ratings yet
- NotesDocument9 pagesNotesShrinivas MNo ratings yet
- Study On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsDocument5 pagesStudy On Tool Pre-Setter: Fig. 1. Different Offset For Different ToolsAnonymous 5AmJ13mLkNo ratings yet
- Chapter 04A Orthographic ProjectionDocument44 pagesChapter 04A Orthographic ProjectionFaris AlbogamiNo ratings yet
- Gyroscopic EffectDocument13 pagesGyroscopic EffectRavinder SinghNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- MT Module 4 NotesDocument21 pagesMT Module 4 NotesEmmanuel_ShajiNo ratings yet
- Review For Exam 2.1Document6 pagesReview For Exam 2.1Quân Bảo100% (1)
- Sweep JodzaDocument1 pageSweep JodzaDado KpsNo ratings yet
- CG - Assignment 3Document7 pagesCG - Assignment 3parth solankiNo ratings yet
- Computer GraphicsDocument17 pagesComputer GraphicsHarshita [ KumariNo ratings yet
- Mod17 - Broaching, Gear Cutting OperationsDocument23 pagesMod17 - Broaching, Gear Cutting OperationsSatish Raja DhulipalaNo ratings yet
- AB 07 Rafif Kinematic Analysis of The Hexapod RobotDocument24 pagesAB 07 Rafif Kinematic Analysis of The Hexapod RobotTindyo PrasetyoNo ratings yet
- Descriptive Geometry: Unlocking the Visual Realm: Exploring Descriptive Geometry in Computer VisionFrom EverandDescriptive Geometry: Unlocking the Visual Realm: Exploring Descriptive Geometry in Computer VisionNo ratings yet
- Harris Corner Detector: Unveiling the Magic of Image Feature DetectionFrom EverandHarris Corner Detector: Unveiling the Magic of Image Feature DetectionNo ratings yet
- Pinhole Camera Model: Understanding Perspective through Computational OpticsFrom EverandPinhole Camera Model: Understanding Perspective through Computational OpticsNo ratings yet
- Two Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionFrom EverandTwo Dimensional Computer Graphics: Exploring the Visual Realm: Two Dimensional Computer Graphics in Computer VisionNo ratings yet
- Procedural Surface: Exploring Texture Generation and Analysis in Computer VisionFrom EverandProcedural Surface: Exploring Texture Generation and Analysis in Computer VisionNo ratings yet
- TURIN Arc Welding Operation Manual20200901Document46 pagesTURIN Arc Welding Operation Manual20200901Javier Alarcon VelazcoNo ratings yet
- Programming Manual Robot TurinDocument90 pagesProgramming Manual Robot TurinJavier Alarcon VelazcoNo ratings yet
- TURIN External Shaft Operating Instructions20200515Document15 pagesTURIN External Shaft Operating Instructions20200515Javier Alarcon VelazcoNo ratings yet
- Debugging Manualv1.20200515-CompressedDocument88 pagesDebugging Manualv1.20200515-CompressedJavier Alarcon VelazcoNo ratings yet
- en 00Document4 pagesen 00Javier Alarcon VelazcoNo ratings yet
- Um en Axl F Sys Inst 7982 en 13Document186 pagesUm en Axl F Sys Inst 7982 en 13Javier Alarcon VelazcoNo ratings yet
- Um en BTP 2xxxx 108245 en 02Document46 pagesUm en BTP 2xxxx 108245 en 02Javier Alarcon VelazcoNo ratings yet
- Um en Axl e Sys Inst 8395 en 07Document62 pagesUm en Axl e Sys Inst 8395 en 07Javier Alarcon VelazcoNo ratings yet
- Um en Axc F XT SPLC 1000 109449 en 01Document202 pagesUm en Axc F XT SPLC 1000 109449 en 01Javier Alarcon VelazcoNo ratings yet
- Special TransformersDocument8 pagesSpecial Transformerswords4devNo ratings yet
- Accessories For XLPE-Insulated HV-CablesDocument9 pagesAccessories For XLPE-Insulated HV-Cablesjulianvillajos100% (1)
- Muy BuenoDocument40 pagesMuy BuenoJoséNo ratings yet
- Guaranteed Technical Particulars For Disc Insulators Units:: Page 1 of 3Document7 pagesGuaranteed Technical Particulars For Disc Insulators Units:: Page 1 of 3Saptarshi ChatterjeeNo ratings yet
- 245kV & 145kV CB-MSETCLDocument55 pages245kV & 145kV CB-MSETCLVenkatNo ratings yet
- Our Telegram Channel - : Q.no 1. Earthing Is Necessary To Give Protection AgainstDocument125 pagesOur Telegram Channel - : Q.no 1. Earthing Is Necessary To Give Protection AgainstBhushan AkolkarNo ratings yet
- Trafo Erection and MAINTENANCEDocument23 pagesTrafo Erection and MAINTENANCEgm29No ratings yet
- SEE1401 (2) Power SystemDocument79 pagesSEE1401 (2) Power SystemAashish YadavNo ratings yet
- TD04 145kV GIS Technical GuideDocument44 pagesTD04 145kV GIS Technical GuideArvind KumawatNo ratings yet
- JVC - gr-fxm38 - sxm48 - sxm67 - sxm87 - Ea-Ed-Eg-Ek - Service Manual PDFDocument83 pagesJVC - gr-fxm38 - sxm48 - sxm67 - sxm87 - Ea-Ed-Eg-Ek - Service Manual PDF47ASSONo ratings yet
- Toll Plaza Boq P 04Document27 pagesToll Plaza Boq P 04Abn e MaqsoodNo ratings yet
- 8 - Mcma - Selection of Electric Cables - Risk of Sub-StandardDocument9 pages8 - Mcma - Selection of Electric Cables - Risk of Sub-StandardmajorabsNo ratings yet
- Single Core Thermosetting Insulated LSF Wiring CablesDocument1 pageSingle Core Thermosetting Insulated LSF Wiring CablesOgnjen BiočaninNo ratings yet
- Setft eDocument3 pagesSetft eLandry YoboueNo ratings yet
- Final ProjectDocument37 pagesFinal ProjectManirathnam KarumanchiNo ratings yet
- Documents For 66 KV Switch Yard & Main Control Room 1Document28 pagesDocuments For 66 KV Switch Yard & Main Control Room 1Ramesh AnanthanarayananNo ratings yet
- Variador PS200 - PDFDocument122 pagesVariador PS200 - PDF19536758No ratings yet
- Power Cable Technology ReviewDocument11 pagesPower Cable Technology Reviewtees220510No ratings yet
- Technical Data Sheet SGQ-21-1136: Pos.1 C.ref.: CodeDocument5 pagesTechnical Data Sheet SGQ-21-1136: Pos.1 C.ref.: CodeAbdul MuizNo ratings yet