You might also like
- EAT216 - Vibration 20191008Document47 pagesEAT216 - Vibration 20191008ibrahim ibrahimNo ratings yet
- Dynamics 2 No1Document19 pagesDynamics 2 No1NickNo ratings yet
- 40 Sample ChapterDocument15 pages40 Sample ChapterarjunNo ratings yet
- V&N 354 LectureLesing5Document7 pagesV&N 354 LectureLesing5YemukelaniNo ratings yet
- Week2 - Dawn - of - QP QM102Document32 pagesWeek2 - Dawn - of - QP QM102Rahul SharmaNo ratings yet
- Vibration Chapter03 Harmonic Excited VibDocument37 pagesVibration Chapter03 Harmonic Excited Vibmargiyanto108No ratings yet
- Course Outline: Chapter 1. IntroductionDocument21 pagesCourse Outline: Chapter 1. IntroductionBill WilliamsNo ratings yet
- Things To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumDocument29 pagesThings To Learn Today: 1. Equivalent Spring Stiffness 2. A PendulumSayantan GhoshNo ratings yet
- Chapter 13Document14 pagesChapter 13Adrian PredaNo ratings yet
- Two Lecture VibrationDocument12 pagesTwo Lecture VibrationUjjawal GuptaNo ratings yet
- Lesson 3 - Harmonically Excited VibrationDocument80 pagesLesson 3 - Harmonically Excited VibrationIzzat IkramNo ratings yet
- 2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BDocument4 pages2.2.5 Boundary/initial Conditions: Du DX U 0 in The Domain (A, B) - y (A) A y (B) BIrfan Nazir NoriNo ratings yet
- University Physics: Waves and Electricity: Dr.-Ing. Erwin SitompulDocument37 pagesUniversity Physics: Waves and Electricity: Dr.-Ing. Erwin SitompulAliNo ratings yet
- Simple Harmonic Motion: 8.01 Week 12D1Document23 pagesSimple Harmonic Motion: 8.01 Week 12D1Deepak AwasthiNo ratings yet
- ME312 Lab Manual 2021 - Cantilever BeamDocument7 pagesME312 Lab Manual 2021 - Cantilever BeamPranav BajajNo ratings yet
- 3 - Unit 2 ME 70 Free Vibration Lecture 1Document22 pages3 - Unit 2 ME 70 Free Vibration Lecture 1KEZIA MAE JALANDONINo ratings yet
- Vibration Damping: Professor Mike BrennanDocument52 pagesVibration Damping: Professor Mike Brennanpuppyarav2726No ratings yet
- Vibration Chapter03 Ver2.0Document121 pagesVibration Chapter03 Ver2.0Batuhan GünerNo ratings yet
- Homework1 PDFDocument3 pagesHomework1 PDFYuanhao LiuNo ratings yet
- Lecture 1aDocument19 pagesLecture 1aYusuf GulNo ratings yet
- Wk8 Lectrure8 21nov2017 NewformatDocument14 pagesWk8 Lectrure8 21nov2017 Newformatهاني احمدNo ratings yet
- Chapter 2 Response To Harmonic Excitation: Introduces The Important Concept of ResonanceDocument100 pagesChapter 2 Response To Harmonic Excitation: Introduces The Important Concept of Resonanceasif aliNo ratings yet
- Notes Dynamics UC3MDocument6 pagesNotes Dynamics UC3MAnonymous oFxrAqvNo ratings yet
- Best Ignored: Force Constant "K"Document3 pagesBest Ignored: Force Constant "K"Tuan TranNo ratings yet
- 3 General Forced Response: ExcitationsDocument90 pages3 General Forced Response: ExcitationsShahzaib Anwar OffNo ratings yet
- April 2009 FinalDocument10 pagesApril 2009 FinalAdalric LeungNo ratings yet
- Chapter 3Document35 pagesChapter 3alikhalidd23No ratings yet
- Assignment - 2 - Updated Solution - ME354ADocument13 pagesAssignment - 2 - Updated Solution - ME354Adagani ranisamyukthaNo ratings yet
- Introduction To Free Vibration: MXT KXT MXT KXT X XX VDocument7 pagesIntroduction To Free Vibration: MXT KXT MXT KXT X XX VJaffar AliNo ratings yet
- Forced Vibration of SDOF SystemDocument22 pagesForced Vibration of SDOF Systemanmol thakurNo ratings yet
- 3.modeling of Mechanical SystemDocument17 pages3.modeling of Mechanical SystemAjay JagarlamudiNo ratings yet
- PH127 Lectures Nov. 2022 4Document212 pagesPH127 Lectures Nov. 2022 4dicksonjohnxpNo ratings yet
- Structural Dynamics: Unit-I Chapter - 3Document18 pagesStructural Dynamics: Unit-I Chapter - 32BA19CV059 Rakshita SarangmathNo ratings yet
- Análisis de Fourier de La EnergíaDocument107 pagesAnálisis de Fourier de La EnergíaElvyn OjedaNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- MCG 4308 Lec 4Document25 pagesMCG 4308 Lec 4Nadjet AkloucheNo ratings yet
- Simple Harmonic Motion by Tom MarshDocument16 pagesSimple Harmonic Motion by Tom MarshMohd.MehdiAzmetNo ratings yet
- DOM M S D F Harmonical Excited Vibration 1Document90 pagesDOM M S D F Harmonical Excited Vibration 1Prajapati DhavalNo ratings yet
- 23-Legendre¿s Linear Equation, Applications-10!09!2019 (10-Sep-2019) Material II 10-Sep-2019 Module 3Document5 pages23-Legendre¿s Linear Equation, Applications-10!09!2019 (10-Sep-2019) Material II 10-Sep-2019 Module 3Parth VijayNo ratings yet
- Midterm Review PDFDocument16 pagesMidterm Review PDFMt RushNo ratings yet
- FALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IDocument14 pagesFALLSEM2023-24 BECE302L TH VL2023240100264 2023-04-27 Reference-Material-IRupam KunduNo ratings yet
- MIT2 003SCF11 Pset9 SolDocument10 pagesMIT2 003SCF11 Pset9 SolDasaka BrahmendraNo ratings yet
- Lecture 2eDocument7 pagesLecture 2eYusuf GulNo ratings yet
- Applications of Linear Differential EquationsDocument7 pagesApplications of Linear Differential EquationsravikiranwglNo ratings yet
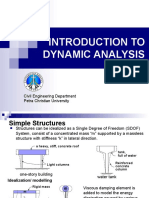
- 3-Introduction To Dynamic AnalysisDocument16 pages3-Introduction To Dynamic Analysiskenny lieNo ratings yet
- Fiz3 FoyDocument62 pagesFiz3 FoyCeren DENİZNo ratings yet
- Lecture - 8 Forced VibrationDocument27 pagesLecture - 8 Forced Vibrationcj9540No ratings yet
- Mce371 7Document19 pagesMce371 7Abul HasnatNo ratings yet
- Forced Single DoF VibrationDocument30 pagesForced Single DoF VibrationhlkjjkNo ratings yet
- Hecht - Chapter 2Document44 pagesHecht - Chapter 2JunHyoung KimNo ratings yet
- Forced VibrationDocument9 pagesForced Vibrationstphn_maturinNo ratings yet
- Harmonic Oscillator3 PDFDocument4 pagesHarmonic Oscillator3 PDFhimanshuNo ratings yet
- Lecture 5 - Lorentz ModelDocument11 pagesLecture 5 - Lorentz ModelPanNo ratings yet
- 1.a. Undamped Free VibrationsDocument81 pages1.a. Undamped Free VibrationsPrajwal CNo ratings yet
- MES 307 GM Getaran Paksa HarmonisDocument38 pagesMES 307 GM Getaran Paksa HarmonisNanda Diyah PitalokaNo ratings yet
- Forced Oscillations Lab Report Draft 1Document13 pagesForced Oscillations Lab Report Draft 1Praveen Dennis XavierNo ratings yet
- Damped System: Free Vibration: KX X C X MDocument5 pagesDamped System: Free Vibration: KX X C X MJaziri Dato JNo ratings yet
- V&N 354 - LectureLesing1Document4 pagesV&N 354 - LectureLesing1YemukelaniNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Lecture 1 Introduction & ReviewDocument38 pagesLecture 1 Introduction & Reviewهاني احمدNo ratings yet
- Wk11 Lectrure11 12dec2017 FinalDocument15 pagesWk11 Lectrure11 12dec2017 Finalهاني احمدNo ratings yet
- Unit 1 Example Sheet 18-19Document2 pagesUnit 1 Example Sheet 18-19هاني احمدNo ratings yet
- Wk10 Lectrure10 27dec2018 FinalDocument12 pagesWk10 Lectrure10 27dec2018 Finalهاني احمدNo ratings yet
- wk9 Lectrure9 20nov2018Document16 pageswk9 Lectrure9 20nov2018هاني احمدNo ratings yet
- Wk8 Lectrure8 21nov2017 NewformatDocument14 pagesWk8 Lectrure8 21nov2017 Newformatهاني احمدNo ratings yet
- BucklingDocument10 pagesBucklingهاني احمدNo ratings yet
- Seminar - 5 - Solutionfree Vibration of Undamped multi-DOF SystemsDocument17 pagesSeminar - 5 - Solutionfree Vibration of Undamped multi-DOF Systemsهاني احمدNo ratings yet
- KB6005 CourseworkDocument4 pagesKB6005 Courseworkهاني احمدNo ratings yet
- Seminar - 5 - Free Vibration of Undamped multi-DOF SystemsDocument3 pagesSeminar - 5 - Free Vibration of Undamped multi-DOF Systemsهاني احمدNo ratings yet
- Colour and Form-I: Design Course The Fundamentals of Colour by Ms. Nijoo Dubey NID Campus, BengaluruDocument40 pagesColour and Form-I: Design Course The Fundamentals of Colour by Ms. Nijoo Dubey NID Campus, BengaluruKalpa RNo ratings yet
- Term PaperDocument9 pagesTerm PaperJake YaoNo ratings yet
- I. Multiple Choice. Encircle The Letter of The Correct AnswerDocument3 pagesI. Multiple Choice. Encircle The Letter of The Correct Answerbart Porcadilla0% (1)
- Exp 2 Series DC CircuitsDocument4 pagesExp 2 Series DC Circuitsmaskrasheed777No ratings yet
- Tunnelling and Underground Space Technology: Leonardo M. Massone, Francisco NazarDocument13 pagesTunnelling and Underground Space Technology: Leonardo M. Massone, Francisco NazarnishantNo ratings yet
- Mechanical Design: Mott (2004), Shigley and Uicker (1995), Budynas and Nisbett (2008), and Norton (2000)Document77 pagesMechanical Design: Mott (2004), Shigley and Uicker (1995), Budynas and Nisbett (2008), and Norton (2000)Ashesh BhattaraiNo ratings yet
- KIRK KSEP Separator Internals 2012Document5 pagesKIRK KSEP Separator Internals 2012TesisAyF ProyectoNo ratings yet
- B 36 - B 36M - 13Document9 pagesB 36 - B 36M - 13Ahmed BilalNo ratings yet
- Nat 12 Mock TestDocument13 pagesNat 12 Mock TestMARC DANIEL CALUBNo ratings yet
- Laboratory NameDocument16 pagesLaboratory Namegopinadh57No ratings yet
- 3200 Indicador TransmisorDocument4 pages3200 Indicador TransmisorEsteban ValenciaNo ratings yet
- 7.GATE - Atomic and Molecular Physics Solution-2023Document5 pages7.GATE - Atomic and Molecular Physics Solution-2023Guddu ChakrabortyNo ratings yet
- Engineers Handbooks As 17Document140 pagesEngineers Handbooks As 17Rakesh TiwariNo ratings yet
- Topic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Document8 pagesTopic 4 Differential Pressure and Flow Sensors (Bernoulli Principle Venturi Effect)Vefa MustafazadeNo ratings yet
- (Maa 2.7) AsymptotesDocument18 pages(Maa 2.7) AsymptotesAleya NajihaNo ratings yet
- 120k Active Code 668-2Document4 pages120k Active Code 668-2selviantobilmon78No ratings yet
- Pinch Analysis - A Retrofit ApproachDocument5 pagesPinch Analysis - A Retrofit ApproachMUKUNDNo ratings yet
- Soil-Structure Interaction in Yielding Systems: Javier Aviles and Luis E. Perez-RochaDocument23 pagesSoil-Structure Interaction in Yielding Systems: Javier Aviles and Luis E. Perez-RochaBaban A.BapirNo ratings yet
- A Comprehensive Overview of Power Converter Topologies For Induction Heating ApplicationsDocument33 pagesA Comprehensive Overview of Power Converter Topologies For Induction Heating ApplicationsFajar MaulanaNo ratings yet
- Fatigue Analysis of High Performance Cement Concrete For Pavements Using The Probabilistic ApproachDocument5 pagesFatigue Analysis of High Performance Cement Concrete For Pavements Using The Probabilistic ApproachsahilNo ratings yet
- Cambridge International AS and A Level Physics (9702) : Practical Booklet 4Document10 pagesCambridge International AS and A Level Physics (9702) : Practical Booklet 4Abdul Ahad SajjadNo ratings yet
- General Physics I Work and Kinetic Energy Practice ProblemsDocument3 pagesGeneral Physics I Work and Kinetic Energy Practice ProblemsMARIELLE ANDREA ZAMORASNo ratings yet
- Module 3.1 - Ideal - GasDocument26 pagesModule 3.1 - Ideal - GasMax100% (1)
- ECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 16-Jan-2014, Room H101Document9 pagesECM2105 Control: Prathyush P Menon, Christopher Edwards Date: 16-Jan-2014, Room H101Eduardo FerreiraNo ratings yet
- Polymer Compositions InjectionDocument14 pagesPolymer Compositions InjectionJessiNo ratings yet
- Dove 1999Document12 pagesDove 1999faizan iqbalNo ratings yet
- Elements of Soil Mechanics, 9th Edition Earth Pressure CoefficientsDocument8 pagesElements of Soil Mechanics, 9th Edition Earth Pressure CoefficientsMohamad SyafiqNo ratings yet
- Rigidity Modulus - Torsional PendulumDocument4 pagesRigidity Modulus - Torsional PendulumGAMES TECHNo ratings yet
- Chapter 8 Electron Configurations and PeriodicityDocument74 pagesChapter 8 Electron Configurations and PeriodicityKhaleq MohammadNo ratings yet
- Bci - 750gpm@250psi PDFDocument2 pagesBci - 750gpm@250psi PDFSergio ZegarraNo ratings yet