You might also like
- Tutorial 8Document2 pagesTutorial 8Gaurav ANo ratings yet
- Root LocusDocument27 pagesRoot LocusAzmi Bin A MataliNo ratings yet
- Root Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100Document29 pagesRoot Locus: Figure 1: Pole/Zeros Diagrams in The Car Cruise Control Example For K 50 and K 100anas habashNo ratings yet
- Routh Criterion - Tutorial 7 - Co - 12Document3 pagesRouth Criterion - Tutorial 7 - Co - 12Haelu KuNo ratings yet
- Root locus analysis and stability of proportional-integral control systemsDocument4 pagesRoot locus analysis and stability of proportional-integral control systemsSerkan KaradağNo ratings yet
- Control Systems-1 PDFDocument8 pagesControl Systems-1 PDFmaheshbabu527No ratings yet
- Tutorial 6Document3 pagesTutorial 6Gaurav ANo ratings yet
- Assignment NewDocument10 pagesAssignment NewChitra M. chitra.eceNo ratings yet
- Lag Compensator Design Using Root Locus Technique: ObjectivesDocument7 pagesLag Compensator Design Using Root Locus Technique: ObjectivesMuhammad AdeelNo ratings yet
- EE250 PS04 SolutionDocument13 pagesEE250 PS04 SolutionUJJAWAL GAMERNo ratings yet
- ME 360 Control Systems PID Control of A Spring-Mass-Damper (SMD) PositionDocument7 pagesME 360 Control Systems PID Control of A Spring-Mass-Damper (SMD) Positionjamesyboy100No ratings yet
- HW CH7 (Q)Document4 pagesHW CH7 (Q)krishna135No ratings yet
- Routh Critexvxcrion - TutorialDocument3 pagesRouth Critexvxcrion - TutorialDtu MandyNo ratings yet
- Lag Comp Ensator Design Using Root: Ob JectivesDocument8 pagesLag Comp Ensator Design Using Root: Ob JectivesProf HaryNo ratings yet
- Root LocusDocument1 pageRoot LocusYatharth Khanna100% (1)
- 5.2 Root-Locus TechniqueDocument3 pages5.2 Root-Locus Techniquevikash yadavNo ratings yet
- Suggested Solution To Past Papers PDFDocument20 pagesSuggested Solution To Past Papers PDFMgla AngelNo ratings yet
- Control Systems Assignment SolutionsDocument4 pagesControl Systems Assignment SolutionsKeshav ChandakNo ratings yet
- 141312-141701-Control - Winter - 2013 CT PDFDocument2 pages141312-141701-Control - Winter - 2013 CT PDFvisupinuNo ratings yet
- Engine Cooling System AnalysisDocument14 pagesEngine Cooling System AnalysisNimra0% (1)
- HW9 SolutionsDocument5 pagesHW9 SolutionsAndreas mNo ratings yet
- Designing Compensator ProblemsDocument7 pagesDesigning Compensator ProblemsJustin Jose PNo ratings yet
- Quiz 2 Previous Year Questions: Y(s) R(S)Document2 pagesQuiz 2 Previous Year Questions: Y(s) R(S)Sandeep RvsNo ratings yet
- TUTORIAL 7 - Steady-State ErrorDocument4 pagesTUTORIAL 7 - Steady-State ErrortiraNo ratings yet
- Tugas 4 (Inverse Response Chapter 17)Document5 pagesTugas 4 (Inverse Response Chapter 17)PKM KLAMPIS NGASEMNo ratings yet
- Solution Set 8Document7 pagesSolution Set 8Abdul AlsomaliNo ratings yet
- Week4solution (1)Document6 pagesWeek4solution (1)Raja KumarNo ratings yet
- Mech3418 Ca 2016Document4 pagesMech3418 Ca 2016Barry PoonNo ratings yet
- Root Locus Bonus v2Document7 pagesRoot Locus Bonus v2AmreshAmanNo ratings yet
- Solution Assignment 7Document5 pagesSolution Assignment 7sushant sharmaNo ratings yet
- HW 5Document4 pagesHW 5Noo SaitNo ratings yet
- Classical Control: 1 ReadingDocument1 pageClassical Control: 1 ReadingIbrahim MoamenNo ratings yet
- Electrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesDocument23 pagesElectrical-Engineering Engineering Control-Systems Root-Locus-Techniques NotesRahul TaldaNo ratings yet
- MEC E 420 Feedback Control Dynamic SystemsDocument8 pagesMEC E 420 Feedback Control Dynamic SystemscatzzruleNo ratings yet
- AssignmentDocument12 pagesAssignmentSamuel TanNo ratings yet
- 06 ESm 43 MQDocument6 pages06 ESm 43 MQGuruprasadNo ratings yet
- Root-Locus Design TechniquesDocument25 pagesRoot-Locus Design TechniquesNur DalilaNo ratings yet
- Dch10 Poles Zeros v3 SolutionsDocument12 pagesDch10 Poles Zeros v3 SolutionstezukaNo ratings yet
- Practice QuestionsDocument3 pagesPractice QuestionsBlair ZhangNo ratings yet
- Control Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Document2 pagesControl Systems Engineering D227 Solutions Q 2003: 8) 3) (S S (S K G (Ol) + +Chintu GurbaniNo ratings yet
- EE481 Control Systems Root Locus DesignDocument77 pagesEE481 Control Systems Root Locus DesignDwi Ika BasithaNo ratings yet
- Root Locus : Practice Sheet 01 (by Diptanshu sir)Document10 pagesRoot Locus : Practice Sheet 01 (by Diptanshu sir)Aryan TejanNo ratings yet
- Sample Problems of Control System 2018Document18 pagesSample Problems of Control System 2018anon_463330020No ratings yet
- Determine stability and pole locations using Routh tableDocument6 pagesDetermine stability and pole locations using Routh tabletiraNo ratings yet
- ConSys Compre (2017-18)Document2 pagesConSys Compre (2017-18)Dev ShahNo ratings yet
- Model Answers CONTROL SYSTEM EC-502 Midterm-I July-Dec 2015-16Document17 pagesModel Answers CONTROL SYSTEM EC-502 Midterm-I July-Dec 2015-16VIPUL100% (1)
- 22-23Document2 pages22-23Goura Sundar TripathyNo ratings yet
- Control SystemsDocument3 pagesControl SystemsIlavarasan TamizhNo ratings yet
- K Ss S S: WorksheetDocument3 pagesK Ss S S: WorksheetBelayneh AbirhamNo ratings yet
- Control System Tutorial KGPDocument2 pagesControl System Tutorial KGPOjaswa AnandNo ratings yet
- T2 BlockDiagram SFG Time ResponseDocument9 pagesT2 BlockDiagram SFG Time ResponseRaj PatelNo ratings yet
- HW 5 SolDocument10 pagesHW 5 SolPedroNo ratings yet
- Root Locus Diagram - GATE Study Material in PDFDocument7 pagesRoot Locus Diagram - GATE Study Material in PDFAtul Choudhary100% (1)
- Midsem 21-22Document4 pagesMidsem 21-22nan.sayan30No ratings yet
- cat 1 & 2Document2 pagescat 1 & 2maestromoanaNo ratings yet
- Homework 7 - SolutionsDocument13 pagesHomework 7 - SolutionsMuhamad ArifNo ratings yet
- Tutorial III Root Locus DesignDocument25 pagesTutorial III Root Locus Designapi-3856083100% (3)
- Cohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)From EverandCohomology Operations (AM-50), Volume 50: Lectures by N. E. Steenrod. (AM-50)No ratings yet
- Structural Dynamics - ESA 322 Lecture 3aDocument34 pagesStructural Dynamics - ESA 322 Lecture 3aPurawin SubramaniamNo ratings yet
- Hartnell Governor Isochronous Speed Equations - Engineers EdgeDocument1 pageHartnell Governor Isochronous Speed Equations - Engineers Edgestallone21No ratings yet
- Equations of Motion for Multi-Degree SystemsDocument31 pagesEquations of Motion for Multi-Degree Systemspattrapong pongpattraNo ratings yet
- PHY109 - Lecture 10Document14 pagesPHY109 - Lecture 10MD Minhazur RahmanNo ratings yet
- Thermodynamics Basics for Mechanical EngineersDocument35 pagesThermodynamics Basics for Mechanical EngineersVinayaka G PNo ratings yet
- Cao 2017 Smart Mater. Struct. 26 043001Document16 pagesCao 2017 Smart Mater. Struct. 26 043001passion777No ratings yet
- Wiring Diagram of Gear Control (GS)Document8 pagesWiring Diagram of Gear Control (GS)Tupai PanderNo ratings yet
- MSC ADAMS View Walkthrough GuideDocument4 pagesMSC ADAMS View Walkthrough GuideJayNo ratings yet
- Moore UnitR Chapters 1 and 2Document42 pagesMoore UnitR Chapters 1 and 2output_running_jumpNo ratings yet
- Shinyanga Vocational Education and Training Centre Internal Assessment Plan February 2016 To July 2016Document11 pagesShinyanga Vocational Education and Training Centre Internal Assessment Plan February 2016 To July 2016TajiriMollelNo ratings yet
- WCA ConacytCIDESI2022Document11 pagesWCA ConacytCIDESI2022WILFRIDO CALLEJA-ARRIAGANo ratings yet
- Broward County Schools AP Physics 1 ReviewDocument20 pagesBroward County Schools AP Physics 1 Reviewchris hemmainNo ratings yet
- Hydraulics and Fluid Mechanics (Indiabix)Document24 pagesHydraulics and Fluid Mechanics (Indiabix)Jawahir GomezNo ratings yet
- Boczar LessonDocument5 pagesBoczar LessonTommy EdwardNo ratings yet
- Efficient Tension Stiffening Model For Concrete FEMDocument12 pagesEfficient Tension Stiffening Model For Concrete FEMaramosgavilan100% (1)
- Calorimetry - Specific Heat and Latent Heat: 3.1 PurposeDocument6 pagesCalorimetry - Specific Heat and Latent Heat: 3.1 PurposeRajesh JadhavNo ratings yet
- Chapter 7. Fracture and Brittle DeformationDocument16 pagesChapter 7. Fracture and Brittle DeformationNirmalya ChatterjeeNo ratings yet
- Science 7 ST1Document3 pagesScience 7 ST1Alvin GultiaNo ratings yet
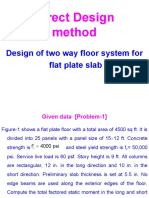
- DDM Example (Flat Plate)Document60 pagesDDM Example (Flat Plate)kamra khanNo ratings yet
- Worksheet Phys 1011Document3 pagesWorksheet Phys 1011firaolmmNo ratings yet
- Vehicle Dynamics Under Longitudinal ForcesDocument10 pagesVehicle Dynamics Under Longitudinal ForcesNeerajNo ratings yet
- IBT Sample Questions: ScienceDocument2 pagesIBT Sample Questions: Scienceshrutiverma_1No ratings yet
- Welding of P91Document10 pagesWelding of P91mahmoud_allam3No ratings yet
- Gravitational Waves - The New FrontierDocument31 pagesGravitational Waves - The New FrontiersurendramaharjanNo ratings yet
- Lesson 10 Application of Work Energy Method: OverviewDocument6 pagesLesson 10 Application of Work Energy Method: OverviewNadjer C. AdamNo ratings yet
- En 1993-1-8Document69 pagesEn 1993-1-8atiNo ratings yet
- 68406-Ch 02Document28 pages68406-Ch 02Kirat Kamboz100% (1)
- Determination of Wind Loads Uk BS en 199Document45 pagesDetermination of Wind Loads Uk BS en 199JAMNo ratings yet
- Orifice and Jet FlowDocument8 pagesOrifice and Jet FlowEngr Arafat Qubati75% (4)
- AssignmentsDocument10 pagesAssignmentsDQZNo ratings yet