You might also like
- UNIT IV Elaticity PDFDocument27 pagesUNIT IV Elaticity PDFTechMine HDNo ratings yet
- Mechanical Properties of Solids FnotesDocument12 pagesMechanical Properties of Solids Fnotespiyushdua01No ratings yet
- ElasticityDocument22 pagesElasticityAnik MahmudNo ratings yet
- Class 11 Cbse PhysicsDocument7 pagesClass 11 Cbse PhysicsShabnam ZakirNo ratings yet
- Elasticity and Deforming Forces (Solids)Document11 pagesElasticity and Deforming Forces (Solids)ksko07No ratings yet
- Mechanical Properties of SolidsDocument34 pagesMechanical Properties of Solidssachin shindeNo ratings yet
- Fluid Mechaics: Fluid Mechanics Is The Branch of Physics Concerned With The Mechanics of FluidsDocument6 pagesFluid Mechaics: Fluid Mechanics Is The Branch of Physics Concerned With The Mechanics of FluidsTofik MohammedNo ratings yet
- Adobe Scan Feb 23, 2024Document14 pagesAdobe Scan Feb 23, 2024XyzNo ratings yet
- Mechanical Properties of Solids (PART-1)Document15 pagesMechanical Properties of Solids (PART-1)Dhirendra Kumar SinghNo ratings yet
- 10 Elasticity and ViscosicityDocument15 pages10 Elasticity and ViscosicityHARSHIT GARGNo ratings yet
- Mechanical Properties of Solids Class 11 Notes Physics Chapter 9 - Learn CBSEDocument9 pagesMechanical Properties of Solids Class 11 Notes Physics Chapter 9 - Learn CBSEAjith kNo ratings yet
- Elasticity MergedDocument22 pagesElasticity MergedMohammad Rashik ZamanNo ratings yet
- Mechanical Properties of SolidDocument22 pagesMechanical Properties of SolidTrillionare HackNo ratings yet
- My CEG Lab Report (1) (AutoRecovered)Document63 pagesMy CEG Lab Report (1) (AutoRecovered)akinyemi.favour.isaacNo ratings yet
- Study Mat6 ElasticityDocument15 pagesStudy Mat6 ElasticitySrijan MalNo ratings yet
- ElasticityDocument30 pagesElasticityMohammad Rashik ZamanNo ratings yet
- Chapter 9 - Mechanical Properties of SolidsDocument10 pagesChapter 9 - Mechanical Properties of SolidsriyaNo ratings yet
- Interatomic Forces and Stress-Strain RelationshipDocument19 pagesInteratomic Forces and Stress-Strain RelationshipSasidaran SasiNo ratings yet
- Types of Forces Types of ForcesDocument4 pagesTypes of Forces Types of ForcesMichelle RiveraNo ratings yet
- B.Sc. Physics - I Year: Djk1A: Properties of MatterDocument79 pagesB.Sc. Physics - I Year: Djk1A: Properties of MatterThatOneGuyNo ratings yet
- Mechanical Properties of Solids - NotesDocument15 pagesMechanical Properties of Solids - NotesNyra HillsNo ratings yet
- 9 Mechanical Properties of SolidsDocument4 pages9 Mechanical Properties of SolidsMokshNo ratings yet
- Chapter 9 Mechanical Properties of SolidsDocument16 pagesChapter 9 Mechanical Properties of Solidstharunprasath32No ratings yet
- Physics_vivaDocument19 pagesPhysics_vivaAkhila ANo ratings yet
- Mechanics of SolidDocument15 pagesMechanics of SolidSreerag Kunnathu SugathanNo ratings yet
- Plastic Vs Elastic DeformationDocument2 pagesPlastic Vs Elastic DeformationRCNo ratings yet
- Aero Mechanics of Solids Lecture NotesDocument100 pagesAero Mechanics of Solids Lecture NotesZeynep OkurNo ratings yet
- 1.simple Stress and StrainDocument26 pages1.simple Stress and StrainthirumalaikumaranNo ratings yet
- Elasticity 1Document32 pagesElasticity 1Sesha Sai KumarNo ratings yet
- Mechanical Properties of Materials ClassNoteDocument9 pagesMechanical Properties of Materials ClassNoteTousik IqbalNo ratings yet
- ElasticityDocument8 pagesElasticityPRATYUSH JADHAVNo ratings yet
- Stress and Strain ExplainedDocument3 pagesStress and Strain ExplainedSiti Munirah Binti ZainudinNo ratings yet
- 4 CB 7 EbDocument84 pages4 CB 7 EbJee AspirantNo ratings yet
- 1st Puc Physics Chapter9-Mechanical Properties of Solids Notes by U N SwamyDocument7 pages1st Puc Physics Chapter9-Mechanical Properties of Solids Notes by U N Swamyashwinikumari bNo ratings yet
- PHY 103 Note 2020-21Document56 pagesPHY 103 Note 2020-21demiladeajakayeNo ratings yet
- Keph 201Document13 pagesKeph 201Omkar RajNo ratings yet
- UNZA PHY 1015 Lecture 8B - Introduction To Mechanical Properties of SolidsDocument12 pagesUNZA PHY 1015 Lecture 8B - Introduction To Mechanical Properties of SolidsBrian MachachaNo ratings yet
- Stress and Strain: Structure GeologyDocument17 pagesStress and Strain: Structure GeologyhusseinNo ratings yet
- Properties of SolidsDocument91 pagesProperties of Solidsshreyamammachen22No ratings yet
- Introduction to Stress and StrainDocument5 pagesIntroduction to Stress and StrainUmesh SainiNo ratings yet
- Mechanical Properties of Solids NotesDocument24 pagesMechanical Properties of Solids Notespavithra.knpvNo ratings yet
- Solid Mechanics-1 PDFDocument4 pagesSolid Mechanics-1 PDFchetanNo ratings yet
- Elasticity (Mech Prop of Solids)Document30 pagesElasticity (Mech Prop of Solids)Jawan DiwaniiNo ratings yet
- Phy vivaqaDocument19 pagesPhy vivaqaAkhila ANo ratings yet
- Elasticity, Sterss and StrainDocument19 pagesElasticity, Sterss and StrainKhairunnisa PutryNo ratings yet
- Concept, Examples, Characteristics Types of Stress and StrainDocument21 pagesConcept, Examples, Characteristics Types of Stress and StrainAlicia Pereira NetoNo ratings yet
- The Mechanical Properties of Wood: Including a Discussion of the Factors Affecting the Mechanical Properties, and Methods of Timber TestingFrom EverandThe Mechanical Properties of Wood: Including a Discussion of the Factors Affecting the Mechanical Properties, and Methods of Timber TestingNo ratings yet
- HOOKE's Law Strength of MaterialsDocument4 pagesHOOKE's Law Strength of MaterialsBlessa IsidroNo ratings yet
- Stress StrainDocument22 pagesStress StrainRinku RinkuNo ratings yet
- AERODocument7 pagesAEROperdezultuNo ratings yet
- Unit - 1 Elastic Properties of MaterialsDocument13 pagesUnit - 1 Elastic Properties of MaterialssullaNo ratings yet
- Elasticity: These States Differ From Each Other Due To The Following Two FactorsDocument7 pagesElasticity: These States Differ From Each Other Due To The Following Two Factorspuput123No ratings yet
- Mechanical properties of solidsDocument11 pagesMechanical properties of solidstNo ratings yet
- FORCESDocument4 pagesFORCESNirvana SuggieNo ratings yet
- Elasticity & ViscosityDocument8 pagesElasticity & ViscositytusharNo ratings yet
- Document 7Document2 pagesDocument 7T N Roland BourgeNo ratings yet
- Grade 11 PhysicsLesson Note May 27,2020Document9 pagesGrade 11 PhysicsLesson Note May 27,2020yigermalamanuel32No ratings yet
- Final Exam Text ScriptDocument13 pagesFinal Exam Text Scriptd46smsfpwcNo ratings yet
- Chapter 3 FluidDocument21 pagesChapter 3 Fluidmisganamarcos10No ratings yet
- Concept of Stress and Strain AssignmentDocument17 pagesConcept of Stress and Strain AssignmentBirwa GandhiNo ratings yet
- Laws of MotionDocument9 pagesLaws of MotionSeema JainNo ratings yet
- VectorDocument5 pagesVectorSeema JainNo ratings yet
- Study Nature, Love Nature, Stay Close To Nature. It Will Never Fail YouDocument1 pageStudy Nature, Love Nature, Stay Close To Nature. It Will Never Fail YouSeema JainNo ratings yet
- Class 11 MathsDocument496 pagesClass 11 MathsSeema JainNo ratings yet
- KAMP NASTA 2022 AssessmentDocument2 pagesKAMP NASTA 2022 AssessmentSeema JainNo ratings yet
- The Fundamental Unit of Life - Cells ExplainedDocument8 pagesThe Fundamental Unit of Life - Cells ExplainedSeema JainNo ratings yet
- Definition of Resistance WeldingDocument16 pagesDefinition of Resistance WeldingMitul patelNo ratings yet
- Draw Management: Executive SummaryDocument13 pagesDraw Management: Executive SummaryJose HernandezNo ratings yet
- Ms 01 140Document77 pagesMs 01 140Ali Ali AsjariNo ratings yet
- BSDM0500Document12 pagesBSDM0500federico.montesNo ratings yet
- Maintenance Stag List-1Document2 pagesMaintenance Stag List-1api-3749066No ratings yet
- Why Pre-Stressing?: Prestressed Concrete Is A Method For Overcoming Concrete's NaturalDocument14 pagesWhy Pre-Stressing?: Prestressed Concrete Is A Method For Overcoming Concrete's NaturalAfifa yasinNo ratings yet
- BL Axis-P FP Catalogue 2019 06 EN PDFDocument68 pagesBL Axis-P FP Catalogue 2019 06 EN PDFZeshan HaydarNo ratings yet
- Preventing and Curing Barite Sag in Highly Deviated WellsDocument3 pagesPreventing and Curing Barite Sag in Highly Deviated WellsJorge Garcia Cardoso100% (1)
- Control Boiler Water Quality with Proper BlowdownDocument3 pagesControl Boiler Water Quality with Proper BlowdownSwaroop Kumar100% (1)
- 6.2 Arch Drawing For Elv4-EDocument38 pages6.2 Arch Drawing For Elv4-ErollyNo ratings yet
- 9 5-8 P110 Tenaris BlueDocument2 pages9 5-8 P110 Tenaris BlueinversionesdawillggNo ratings yet
- Tutorial 6 DR RofdziDocument8 pagesTutorial 6 DR RofdziSuaidah ShimaNo ratings yet
- Iso-Superior Glycols-Plain: Product Features & ApplicationsDocument1 pageIso-Superior Glycols-Plain: Product Features & ApplicationsEldiyar AzamatovNo ratings yet
- Nano LithographyDocument14 pagesNano LithographyMohammad RameezNo ratings yet
- Brochure - Luffa Cylindrica Fiber As An Additive in Concrete MIxtureDocument2 pagesBrochure - Luffa Cylindrica Fiber As An Additive in Concrete MIxtureRhizyl Jhane EstrellaNo ratings yet
- Toilet Layout Details PDFDocument1 pageToilet Layout Details PDFVetrivel AjanNo ratings yet
- Cross Regulator EstimateDocument6 pagesCross Regulator EstimateIrfan ShaNo ratings yet
- Steel and Refurbishment in AAVV FeaturinDocument14 pagesSteel and Refurbishment in AAVV FeaturindiogolafaiaNo ratings yet
- Evapco O&M InstructionDocument52 pagesEvapco O&M InstructionYutt WattNo ratings yet
- Casting Process Selection GuideDocument10 pagesCasting Process Selection Guidehyper meshNo ratings yet
- CMS WORKBOOK Complete BookDocument38 pagesCMS WORKBOOK Complete BookNagamani ArumugamNo ratings yet
- Chapter - 1 - Surface Hardening Processes PDFDocument16 pagesChapter - 1 - Surface Hardening Processes PDFRajaSekarsajja100% (2)
- Surface TensionDocument2 pagesSurface TensionBizay MarikhuNo ratings yet
- Comparison of The Processing of Epoxy Resins in Pultrusion With Open Bath Impregnation and Closed-Injection PultrusionDocument11 pagesComparison of The Processing of Epoxy Resins in Pultrusion With Open Bath Impregnation and Closed-Injection PultrusionfahadNo ratings yet
- Standard Specification For Storage TanksDocument22 pagesStandard Specification For Storage TanksJITENDER KUMAR75% (4)
- Nature of The Project: TH THDocument4 pagesNature of The Project: TH THSyed YousufuddinNo ratings yet
- VRV Technical SpecificationDocument7 pagesVRV Technical Specificationdheerajdorlikar100% (2)
- AB Series - Oil Free Compressors-13Document1 pageAB Series - Oil Free Compressors-13Ismail AliNo ratings yet
- Silicon Valley Power Residential Rebate Application: QualificationsDocument4 pagesSilicon Valley Power Residential Rebate Application: QualificationssandyolkowskiNo ratings yet
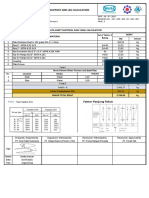
- Support and Leg Calculation: Data Sheet Material Dan Tabel CalculationDocument3 pagesSupport and Leg Calculation: Data Sheet Material Dan Tabel CalculationliusNo ratings yet