You might also like
- Nuig Lander1Document21 pagesNuig Lander1diana meriakri100% (1)
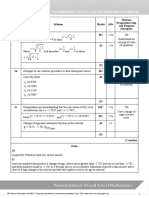
- Mark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Document7 pagesMark Scheme: Q Scheme Marks Aos Pearson Progression Step and Progress Descriptor 1A M1Arthur LongwardNo ratings yet
- Warehouse SimulationDocument14 pagesWarehouse SimulationRISHAB KABDI JAINNo ratings yet
- REVISED SYLLABUS Assessment of Learning 1Document7 pagesREVISED SYLLABUS Assessment of Learning 1FLORIFE CABANGON100% (1)
- IVCAD MT930M1M2A OM HEMT ModelDocument65 pagesIVCAD MT930M1M2A OM HEMT ModellotfiNo ratings yet
- Automatic Bus Suspension PID Controller DesignDocument50 pagesAutomatic Bus Suspension PID Controller Designchuhuynh100% (1)
- Lecture 4Document5 pagesLecture 4Kaveesha JayasuriyaNo ratings yet
- Engineering Math Rule Summary (Week 1 To 6)Document9 pagesEngineering Math Rule Summary (Week 1 To 6)Raghad Al-ShaikhNo ratings yet
- Day-10 MAT-250 RevisedDocument8 pagesDay-10 MAT-250 RevisedFaizaNo ratings yet
- Lecture 1Document6 pagesLecture 1Bredley SilvaNo ratings yet
- A Study of Derivative and Integration A Neutrosophic FunctionsDocument7 pagesA Study of Derivative and Integration A Neutrosophic FunctionsScience DirectNo ratings yet
- Internal Assessment in Mathematics AA HL EXAMPLEDocument28 pagesInternal Assessment in Mathematics AA HL EXAMPLEBuyanbileg AmarsanaaNo ratings yet
- Linear Transformations: DefinitionsDocument22 pagesLinear Transformations: DefinitionsMiral ElnakibNo ratings yet
- Equation Appendix Final ExamDocument5 pagesEquation Appendix Final ExamDhanush raoNo ratings yet
- Image Features and Homography for MatchingDocument11 pagesImage Features and Homography for MatchingIulian NeagaNo ratings yet
- Lecture # 3 (Vectors, Lines and Planes)Document34 pagesLecture # 3 (Vectors, Lines and Planes)Rakhmeen GulNo ratings yet
- 3D Dynamics - 0102 - Fundamentals of Kinematics - Orthogonal Coordinate FramesDocument5 pages3D Dynamics - 0102 - Fundamentals of Kinematics - Orthogonal Coordinate Framessangram6957No ratings yet
- Am1 Ex3Document3 pagesAm1 Ex3CH YNo ratings yet
- MA1511 2021S1 Chapter 4 Vector FieldsDocument22 pagesMA1511 2021S1 Chapter 4 Vector FieldsJustin NgNo ratings yet
- Complex AnalysisDocument43 pagesComplex AnalysisSOUHARDYA DawnNo ratings yet
- Lesson 44 Line Integral: 44.2.1 ExampleDocument6 pagesLesson 44 Line Integral: 44.2.1 Examplearpit sharmaNo ratings yet
- HW 7Document8 pagesHW 7Manuel Salmerón BecerraNo ratings yet
- vt59.2708 21250716178 - 558784118755672 - 9108031432482299617 - n.pdfCHEM 157.1 Activity 4 RK4 Method SystemDocument6 pagesvt59.2708 21250716178 - 558784118755672 - 9108031432482299617 - n.pdfCHEM 157.1 Activity 4 RK4 Method Systemmaemaesotomil23No ratings yet
- Vectors in 3 Dim (Lec #2)Document25 pagesVectors in 3 Dim (Lec #2)Hamid RajpootNo ratings yet
- Homework 4 SolutionDocument10 pagesHomework 4 SolutionKai SamaNo ratings yet
- Unit-2 Vector Calculus NotesDocument28 pagesUnit-2 Vector Calculus NotesRam SinghNo ratings yet
- Matrices (C P CH)Document13 pagesMatrices (C P CH)Ramez AlaliNo ratings yet
- Lecture 4 - LADocument5 pagesLecture 4 - LARafat Hasan DipuNo ratings yet
- Calculus 4 Engineers Notes (AutoRecovered)Document11 pagesCalculus 4 Engineers Notes (AutoRecovered)Alvin MachotaNo ratings yet
- 0512.3543.2022a2 solDocument9 pages0512.3543.2022a2 solSapir HarelNo ratings yet
- Assignment 2Document24 pagesAssignment 2Ashwin KMNo ratings yet
- Example Questions and Answers EENG 482Document5 pagesExample Questions and Answers EENG 482Mackdonald ShiwaniNo ratings yet
- Elecromagnetic Fields and Waves IDocument50 pagesElecromagnetic Fields and Waves Iasiwecollins19No ratings yet
- Kinematics: 1 Deformation and DisplacementDocument15 pagesKinematics: 1 Deformation and DisplacementAayush RajputNo ratings yet
- Es202 3Document10 pagesEs202 3Abbas TufanNo ratings yet
- ϖ-Interpolative Ciric-Reich-Rus-Type Contactions in m-metric spaceDocument6 pagesϖ-Interpolative Ciric-Reich-Rus-Type Contactions in m-metric spaceIJAERS JOURNALNo ratings yet
- Chapter 4Document27 pagesChapter 4Li Ling TanNo ratings yet
- VECTORS" MTCA4001 | Engineering Mathematics 2Document20 pagesVECTORS" MTCA4001 | Engineering Mathematics 2Elizabeth SantiagoNo ratings yet
- Simulink_Modelling_of_the_Transient_CaseDocument39 pagesSimulink_Modelling_of_the_Transient_CaseMUSAIB UL FAYAZ 2022 17No ratings yet
- Statistical Inference 2 Note 02Document7 pagesStatistical Inference 2 Note 02ElelanNo ratings yet
- Ajms 477 23Document14 pagesAjms 477 23BRNSS Publication Hub InfoNo ratings yet
- Image Compression Using Singular Value Decomposition (SVD)Document23 pagesImage Compression Using Singular Value Decomposition (SVD)M Chandan ShankarNo ratings yet
- 5 Cross ProductDocument3 pages5 Cross ProductSarika PutriNo ratings yet
- class noteDocument12 pagesclass noteSunday AdamaNo ratings yet
- Gradient Method OptimizationDocument11 pagesGradient Method OptimizationGafeer FableNo ratings yet
- Determinant and Adjoint of Fuzzy Neutrosophic Soft MatricesDocument17 pagesDeterminant and Adjoint of Fuzzy Neutrosophic Soft MatricesMia AmaliaNo ratings yet
- Kinematics of Particles in Polar CoordinatesDocument33 pagesKinematics of Particles in Polar Coordinatesson gokuNo ratings yet
- Kedar ProjectDocument22 pagesKedar ProjectPratik EkaleNo ratings yet
- SFU MACM 409 Chapter 1 NotesDocument11 pagesSFU MACM 409 Chapter 1 NotesVincent NguyenNo ratings yet
- Minimum Variance Unbiased Estimation: ExampleDocument4 pagesMinimum Variance Unbiased Estimation: ExampleÖmer Faruk DemirNo ratings yet
- Complex Numbers SUMMARYDocument16 pagesComplex Numbers SUMMARYslegendmaxNo ratings yet
- An Introduction To Eigenvalues and Eigenvectors: A Project ReportDocument16 pagesAn Introduction To Eigenvalues and Eigenvectors: A Project ReportUjjal Kumar NandaNo ratings yet
- 전자기학 1장 솔루션Document13 pages전자기학 1장 솔루션이재하No ratings yet
- 6 DOF Robotic Manipulator ModelsDocument6 pages6 DOF Robotic Manipulator ModelsErwin Lopez ZapataNo ratings yet
- Soal KRKK NewDocument6 pagesSoal KRKK NewGita WulandariNo ratings yet
- Lec 3 Cross Product and Equation of LineDocument7 pagesLec 3 Cross Product and Equation of LineMahad ElahiNo ratings yet
- Cartesian Product of Interval Neutrosophic AutomataDocument5 pagesCartesian Product of Interval Neutrosophic AutomataScience DirectNo ratings yet
- Homework SolutionsDocument126 pagesHomework SolutionsVeeramallu GopicharanNo ratings yet
- MA1511 Chapter 3Document20 pagesMA1511 Chapter 3Kang Le LimNo ratings yet
- CalculusDocument8 pagesCalculusWalwal WalwalNo ratings yet
- Diff. Calc. Module 5 Applications of DerivativeDocument10 pagesDiff. Calc. Module 5 Applications of DerivativeFernandez DanielNo ratings yet
- Coursework 1 SolutionsDocument25 pagesCoursework 1 SolutionssamNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Logical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeFrom EverandLogical progression of twelve double binary tables of physical-mathematical elements correlated with scientific-philosophical as well as metaphysical key concepts evidencing the dually four-dimensional basic structure of the universeNo ratings yet
- Application of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsFrom EverandApplication of Derivatives Tangents and Normals (Calculus) Mathematics E-Book For Public ExamsRating: 5 out of 5 stars5/5 (1)
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Granulation Machines Used For Dry Granulation and Wet GranulationDocument18 pagesGranulation Machines Used For Dry Granulation and Wet GranulationShaban Danish100% (1)
- Developmental Psychology-Revised 2018Document51 pagesDevelopmental Psychology-Revised 2018Aadya PoddarNo ratings yet
- Experiencias Cercanas A La Muerte PDFDocument18 pagesExperiencias Cercanas A La Muerte PDFGabriel MoraguesNo ratings yet
- Mathematics Reference Books: No. Name Author PublisherDocument1 pageMathematics Reference Books: No. Name Author PublisherDelicateDogNo ratings yet
- Current TransformerDocument12 pagesCurrent TransformerSyed AbbasNo ratings yet
- Exam 2020-2021Document8 pagesExam 2020-2021Rawan ToubarNo ratings yet
- Production of Acrylonitrile (ANKB40303Document75 pagesProduction of Acrylonitrile (ANKB40303NUR AKMAL HISHAMNo ratings yet
- Numerology Decoder PDFDocument3 pagesNumerology Decoder PDFChris Walker100% (3)
- Slab Design: 6,000MM X 4900MMDocument21 pagesSlab Design: 6,000MM X 4900MMJohnPhilip2000 GeraldizoNo ratings yet
- INBO2020 Solutions 20200220Document11 pagesINBO2020 Solutions 20200220Abhik Kumar MajiNo ratings yet
- Job Satisfaction: A Review of LiteratureDocument10 pagesJob Satisfaction: A Review of LiteratureTunaa DropsNo ratings yet
- EE129 Answers 724Document12 pagesEE129 Answers 724gma.roseangelikaNo ratings yet
- GRADE 9 Course Outlines 1ST QUARTERDocument12 pagesGRADE 9 Course Outlines 1ST QUARTERDahyun KimNo ratings yet
- Goldspink & Kay, 2007 PDFDocument15 pagesGoldspink & Kay, 2007 PDFPantelis TsavalasNo ratings yet
- Visual Division-1Document3 pagesVisual Division-1Jumran BaharNo ratings yet
- Java Mini ProjectDocument12 pagesJava Mini ProjectShridhar PatilNo ratings yet
- TSO TSI Fiber OrientationDocument6 pagesTSO TSI Fiber OrientationEngsiang Yimrutai0% (1)
- Md. Sabbir Hossain Khan: Contact InformationDocument4 pagesMd. Sabbir Hossain Khan: Contact InformationHimelNo ratings yet
- MS 2015-1-2017 - Public Toilets Part 1 Design Criteria (First Revision)Document77 pagesMS 2015-1-2017 - Public Toilets Part 1 Design Criteria (First Revision)qwertypepeheheNo ratings yet
- How to Win Friends and Influence PeopleDocument7 pagesHow to Win Friends and Influence PeoplejzeaNo ratings yet
- Iso 1996 1 2016Document15 pagesIso 1996 1 2016ali_irvNo ratings yet
- Test Specification: iUBT435 - Anatomy and PhysiologyDocument3 pagesTest Specification: iUBT435 - Anatomy and PhysiologyVicki TseNo ratings yet
- Value Based MalaysiaDocument14 pagesValue Based MalaysiaabduNo ratings yet
- Learning Process Focus of EducationDocument2 pagesLearning Process Focus of EducationMellani Gusdian100% (1)