You might also like
- Robot pose representation and transformationsDocument34 pagesRobot pose representation and transformationsTalha YousufNo ratings yet
- Geometric TransformationsDocument40 pagesGeometric TransformationssfundsNo ratings yet
- Time and Motion: Dr. Hasan SajidDocument36 pagesTime and Motion: Dr. Hasan SajidTalha YousufNo ratings yet
- Laplace Transform 2020Document66 pagesLaplace Transform 2020Angeline Chasakara100% (2)
- Industrial Robot AnalysisDocument20 pagesIndustrial Robot AnalysiselkhawadNo ratings yet
- Industrial Robot AnalysisDocument20 pagesIndustrial Robot AnalysiselkhawadNo ratings yet
- EE381 Lec1 Week6Document36 pagesEE381 Lec1 Week6Fatima IqbalNo ratings yet
- 3 Coordination Systems 2Document16 pages3 Coordination Systems 2sokhaNo ratings yet
- Computer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleyDocument53 pagesComputer Graphics Using Opengl, 3 Edition F. S. Hill, Jr. and S. KelleySakirin Bin Haji MuhamedNo ratings yet
- DownloadDocument37 pagesDownloadMohamed Abd-ElmohsenNo ratings yet
- 2D Transformations GuideDocument52 pages2D Transformations GuidePriyadarshini PatilNo ratings yet
- Chapter 16 Planar Kinematics of Rigid BodyDocument51 pagesChapter 16 Planar Kinematics of Rigid BodyDawood AbdullahNo ratings yet
- Planar Kinematics of a Rigid BodyDocument47 pagesPlanar Kinematics of a Rigid Bodyrana abdul waasay0% (1)
- Chapter 16 Planar Kinematics of Rigid BodyDocument52 pagesChapter 16 Planar Kinematics of Rigid BodyMuhd HaqimNo ratings yet
- Lect Position AnalysisDocument66 pagesLect Position AnalysisRayan IsranNo ratings yet
- Lect Position AnalysisDocument158 pagesLect Position AnalysisHassam Balouch100% (1)
- Presentation of Linear Algebra by MinaDocument12 pagesPresentation of Linear Algebra by MinaMinahil UmarNo ratings yet
- L4 - II Computer GraphicsDocument21 pagesL4 - II Computer GraphicsروابيNo ratings yet
- Hill CH 5Document158 pagesHill CH 5Shahriar AhmedNo ratings yet
- Spatial Descriptions and TransformationsDocument28 pagesSpatial Descriptions and Transformationsጆሲ የብርሃን ልጅNo ratings yet
- Geometric TransformationsDocument40 pagesGeometric TransformationsidheivyaNo ratings yet
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDocument40 pages2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisAmudha SenthilNo ratings yet
- 2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisDocument40 pages2D/3D Geometric Transformations: CS485/685 Computer Vision Dr. George BebisProgrammer KhNo ratings yet
- Digital Image Processing TransformationsDocument37 pagesDigital Image Processing TransformationsAiNo ratings yet
- Transformations of ObjectsDocument24 pagesTransformations of Objectsfaizy giiNo ratings yet
- Chapter-16 Planar Kinematics of A Rigid BodyDocument26 pagesChapter-16 Planar Kinematics of A Rigid BodyhamzaNo ratings yet
- Chapter 2 Robot: Spatial Descriptions and TransformationsDocument5 pagesChapter 2 Robot: Spatial Descriptions and Transformationsworkumogess3No ratings yet
- Computer Graphics and Animation - 09 TransformationsDocument35 pagesComputer Graphics and Animation - 09 TransformationsmisteryfollowNo ratings yet
- Week 3Document33 pagesWeek 3Alaa Mohamed NasrallahNo ratings yet
- Chapter 2Document59 pagesChapter 2Saksopheaktra PhoNo ratings yet
- CURVILINEAR MOTION EQUATIONS AND CONCEPTSDocument21 pagesCURVILINEAR MOTION EQUATIONS AND CONCEPTSPrime Rose CutaonNo ratings yet
- 8-QUINTIC and LFSB Trajectory planning-20-Sep-2018Reference Material I - Quintic Polynomial TrajectoryDocument20 pages8-QUINTIC and LFSB Trajectory planning-20-Sep-2018Reference Material I - Quintic Polynomial TrajectoryGanugula Sri Harshan 16BEC0162No ratings yet
- Laplace Tansform & The InverseDocument24 pagesLaplace Tansform & The InverseFiga Aghani RosyidNo ratings yet
- Chapter Four Plane Kinematics of Rigid BodiesDocument54 pagesChapter Four Plane Kinematics of Rigid Bodiesyohannes lemiNo ratings yet
- Circuit Theory Laplace Transform GuideDocument14 pagesCircuit Theory Laplace Transform GuideAkshay Pabbathi100% (1)
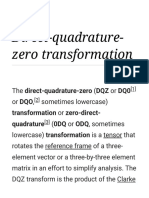
- DQZ transformation simplifies 3-phase circuit analysisDocument48 pagesDQZ transformation simplifies 3-phase circuit analysisAnonymous tpVfikO26No ratings yet
- 2D TransformationsDocument56 pages2D Transformationsguptatulsi31No ratings yet
- MAE 640 Lec3Document20 pagesMAE 640 Lec3kostas.sierros9374No ratings yet
- Lecture 14 B8 BDocument20 pagesLecture 14 B8 BInformative ChannelNo ratings yet
- Mechanical Systems Transfer FunctionDocument17 pagesMechanical Systems Transfer FunctionTalha JalilNo ratings yet
- Cim 23.6Document81 pagesCim 23.6RajeshKumarNo ratings yet
- Lesson04 Slides v4Document33 pagesLesson04 Slides v4Ashley BillNo ratings yet
- Quintic Polynomial Trajectory Planning for Smooth MotionDocument20 pagesQuintic Polynomial Trajectory Planning for Smooth MotionashishNo ratings yet
- 2 Representing Position and OrientationDocument58 pages2 Representing Position and OrientationHuỳnh Võ Thiện TuấnNo ratings yet
- Laplace Transform Applications and PropertiesDocument17 pagesLaplace Transform Applications and Properties2K20-ME-161 Mridul AnandNo ratings yet
- Mathematical Modeling of Dynamic Systems with Laplace TransformDocument22 pagesMathematical Modeling of Dynamic Systems with Laplace TransformSherullah KhanNo ratings yet
- (X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheDocument4 pages(X1-X2, Y1-Y2), Where (X1, Y1) Are Coordinates of TheAshima ChopraNo ratings yet
- Lecture 6Document32 pagesLecture 6Muhammad Usama Bin TahirNo ratings yet
- CG Unit 2Document113 pagesCG Unit 2kariaharsh5No ratings yet
- C4 Revision Maths Physics NotesDocument16 pagesC4 Revision Maths Physics NotesboblishNo ratings yet
- Orbit Maneuvers - Reference Material PDFDocument27 pagesOrbit Maneuvers - Reference Material PDFPARI VERMA 20BAS10054No ratings yet
- Computer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyDocument49 pagesComputer Graphics Using Open GL, 3 Edition F. S. Hill, Jr. and S. KelleyAbrahamNo ratings yet
- Mathematical Techniques for Control Systems Analysis ReviewDocument10 pagesMathematical Techniques for Control Systems Analysis ReviewDeepthiNo ratings yet
- Spatial TransformationsDocument44 pagesSpatial TransformationsLuật NguyễnNo ratings yet
- Setting Out of Transition CurvesDocument13 pagesSetting Out of Transition CurvesapurvajahagirdarNo ratings yet
- MechanicsDocument105 pagesMechanicsBeesam Ramesh KumarNo ratings yet
- Introduction To Quantum Mechanics - Lecture2 - DQHDocument78 pagesIntroduction To Quantum Mechanics - Lecture2 - DQHViệt Hoàng NguyễnNo ratings yet
- Chapter 3 Spatial Descriptions and Transformations PDFDocument33 pagesChapter 3 Spatial Descriptions and Transformations PDFOmar AL JabaiNo ratings yet
- Lecture 1Document50 pagesLecture 1Sheeraz AliNo ratings yet
- Lecture 2Document44 pagesLecture 2zohaibshabirNo ratings yet
- CPE 325: Embedded Systems Laboratory Laboratory Assignment #4Document2 pagesCPE 325: Embedded Systems Laboratory Laboratory Assignment #4Sheeraz AliNo ratings yet
- Assignment No 1, Numerical Methods (Sheeraz AliDocument14 pagesAssignment No 1, Numerical Methods (Sheeraz AliSheeraz AliNo ratings yet
- MTS226 - Lec 1.ADocument11 pagesMTS226 - Lec 1.ASheeraz AliNo ratings yet
- Sciography 1Document4 pagesSciography 1Subash Subash100% (1)
- Lesson Plan Math 5Document10 pagesLesson Plan Math 5sg8sd55qq7No ratings yet
- Linear Regression: DSCI 5240 Data Mining and Machine Learning For Business Russell R. TorresDocument39 pagesLinear Regression: DSCI 5240 Data Mining and Machine Learning For Business Russell R. TorresFurqan ArshadNo ratings yet
- Chapter 4 - Exponentional and Logarithmic Functions - Math in Focus Year 12Document33 pagesChapter 4 - Exponentional and Logarithmic Functions - Math in Focus Year 12Riche LanNo ratings yet
- 3RD TERM - Basic CalculusDocument8 pages3RD TERM - Basic CalculusAaliyah Reign SanchezNo ratings yet
- Integration by Partial FractionDocument26 pagesIntegration by Partial FractionSyarifah Nabila Aulia RantiNo ratings yet
- 1940 O-Level Math PaperDocument3 pages1940 O-Level Math PaperahaanNo ratings yet
- Mathability - Awaken The Math Genius in Your ChildDocument154 pagesMathability - Awaken The Math Genius in Your ChildBhushan Yadav100% (13)
- 6th Grade Math Worksheets PDF, 6th Grade Math TestDocument45 pages6th Grade Math Worksheets PDF, 6th Grade Math TestBenjamin Lawrence100% (1)
- Exploring Negative Space: Log Cross Ratio 2iDocument11 pagesExploring Negative Space: Log Cross Ratio 2iSylvia Cheung100% (2)
- Computing Project: Numerical Solver For The 2D-Channel-Flow in Vorticity-Streamfunction FormulationDocument18 pagesComputing Project: Numerical Solver For The 2D-Channel-Flow in Vorticity-Streamfunction FormulationHappy SinghNo ratings yet
- c4 VectorsDocument42 pagesc4 VectorsrendhelNo ratings yet
- LUSAS SolverDocument458 pagesLUSAS SolverGSH77No ratings yet
- ICE Experiential Learning Workshop AK-2022Document32 pagesICE Experiential Learning Workshop AK-2022Anuj VatsNo ratings yet
- Goldscmidt AlgoDocument4 pagesGoldscmidt AlgochayanpathakNo ratings yet
- Slides Chapter 1 Mathematical PreliminariesDocument19 pagesSlides Chapter 1 Mathematical Preliminarieskkhemmo100% (2)
- 11 Chapter Xi: Multi-Objective ProgrammingDocument23 pages11 Chapter Xi: Multi-Objective Programmingahmed22gouda22No ratings yet
- Propositional Logic SummaryDocument17 pagesPropositional Logic SummaryirwanNo ratings yet
- Advance Soroban TechniqueDocument27 pagesAdvance Soroban TechniqueAllehsiad ZenitramNo ratings yet
- Divide a circle with 40:1 ratio dividing head calculatorDocument8 pagesDivide a circle with 40:1 ratio dividing head calculatorBhobz 1135No ratings yet
- Documentation On Speech EnhancementDocument40 pagesDocumentation On Speech EnhancementNalini PottabathiniNo ratings yet
- Quaid-I-Azam University Islamabad: Date Sheet For Annual Examinations 2018Document2 pagesQuaid-I-Azam University Islamabad: Date Sheet For Annual Examinations 2018AdeelaNo ratings yet
- CURRICULUM-MAP-Kinder 2 MathDocument7 pagesCURRICULUM-MAP-Kinder 2 MathEditha FernandezNo ratings yet
- Rainfall Estimation MethodsDocument13 pagesRainfall Estimation MethodsBashar AljendiNo ratings yet
- Memory MasteryDocument4 pagesMemory MasteryfouzanNo ratings yet
- MATH 10 QII Week 7 D2 QAedDocument6 pagesMATH 10 QII Week 7 D2 QAedApril Rose Caquilala GalauraNo ratings yet
- Alexis Karpouzos - The Mathematics of ImaginationDocument4 pagesAlexis Karpouzos - The Mathematics of ImaginationAlexis karpouzos100% (2)
- Prelims CB em Ii5Document21 pagesPrelims CB em Ii5Ugaas SareeyeNo ratings yet
- Combinations LottoDocument4 pagesCombinations LottoFranciscoNo ratings yet
- Parallel and Perpendicular Lines: Chapter Test Form BDocument3 pagesParallel and Perpendicular Lines: Chapter Test Form BHyelin Song0% (1)